
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
апреля
29
понедельник,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
ФЕДЕРАЛЬНАЯ АВИАЦИОННАЯ СЛУЖБА РОССИИ
ПРИКАЗ
3 июня 1998 года № 154
г. Москва
О ВВЕДЕНИИ В ДЕЙСТВИЕ ДОПОЛНЕНИЙ В РУКОВОДСТВО ПО ПОСТРОЕНИЮ АЭРОДРОМНЫХ СХЕМ И ОПРЕДЕЛЕНИЮ БЕЗОПАСНЫХ ВЫСОТ ПРОЛЕТА ПРЕПЯТСТВИЙ
В связи с оснащением аэродромов России радиомаяками VOR/DМЕ зарубежного и отечественного производства, позволяющими применять их при разработке аэродромных схем захода на посадку, а также в целях повышения эффективности использования курсовых маяков радиомаячных систем (РМС) при заходе на посадку
ПРИКАЗЫВАЮ:
1. Утвердить и ввести в действие с 10.07.98 Дополнения к приказу ДВ-86 от 08.08.94 "Руководство по построению аэродромных схем и определению безопасных высот пролета препятствий", в части установления правил учета препятствий для начального этапа захода на посадку с участками счисления пути и введения правил учета препятствий для захода на посадку по курсовому маяку РМС (Приложения 1, 2).
2. Начальнику УГНБП ФАС России Нерадько А.В, совместно с руководителем "Центра расчетов аэродромных схем и минимумов аэродромов" при ГосНИИ "Аэронавигация", организовать издание Дополнений к "Руководству по построению аэродромных схем и определению безопасных высот пролета препятствий" в типографии Акционерного общества "Центр автоматизированного обучения" при Академии ГА в достаточном количестве.
3. Начальникам территориальных органов ФАС России информировать руководителей аэропортов и авиапредприятий о введении в действие указанных Дополнений.
Директор Г.Н. Зайцев
ДОПОЛНЕНИЕ
к "Руководству по построению аэродромных схем и определению безопасных высот пролета препятствий" в части установления правил учета препятствии для начального этапа захода на посадку с участками счисления пути.
5.2.8. Начальный этап захода на посадку с участками счисления пути (схемы УСП).
5.2.8.1. Область применения и типы схем УСП.
Схемы УСП отличаются от ранее рассмотренных схем захода на посадку наличием участков, на которых не обеспечивается наведение по линии пути (эти участки условно названы участками счисления пути). В то же время, такие схемы не могут быть отнесены и к стандартным схемам типа "ипподром" и обратным схемам, поэтому для таких схем применяются специальные правила формирования и критерии учета препятствии.
Схемы УСП применяются с целью экономии времени полета и воздушного пространства в районе аэродрома и позволяют в ряде случаев исключить необходимость применения схем типа "ипподром" и обратных схем. Для использования схем УСП необходим радиомаяк VOR/DМЕ, или два радиомаяка VOR, или радиомаяк VOR и радиомаяк DМЕ для фиксирования контрольных точек, формирующих схему.
Схемы УСП могут быть разработаны только в дополнение к стандартным схемам, основанным только на использовании отдельных приводных радиостанций (ОПРС или DМЕ ).
Схемы УСП могут быть двух типов:
- схемы типа "U" - в которых разворот, выполняемый для выхода на участок счисления пути, и разворот на посадочный курс выполняются в одну сторону (рис. 58-1 и 58-2);
- схемы типа "S" - в которых разворот, выполняемый для выхода на участок счисления пути, и разворот на посадочный курс выполняются в противоположные стороны (рис. 58-3 и 58-4).
5.2.8.2. Построение схемы УСП типа "U", основанной на VOR/DМЕ
На рис. 58-1 показан пример схемы типа "и", основанной на внеаэродромном радиомаяке VOR/DМЕ, совпадающем с КТН. Расположение VOR/DМЕ не позволяет построить линию пути с выходом в КТП в соответствии с критериями п.5.2.2. (см. рис. 41), т.к. угол разворота на посадочный курс превышает 120°. Использование схемы УСП типа "U" позволяет выполнить выход на посадочную прямую по кратчайшему расстоянию.
Схема состоит из первого участка начального этапа захода на посадку, на котором выполняется полет с наведением по линии пути от радиомаяка VOR/DМЕ, расположенного в КТН. В контрольной точке, фиксируемой по отметке дальности DМЕ, выполняется разворот на участок счисления пути, задаваемый только магнитным курсом полета. Курс выбирается таким образом, чтобы угол между линией пути участка счисления пути и траекторией конечного этапа захода на посадку составлял 45°. При этом должны учитываться следующие ограничения:
- максимальная длина участка счисления пути не должна превышать 19 км;
- минимальная длина участка счисления пути должна соответствовать значениям, приведенным в таблицах 17-1 и 17-2;
- угол между первым участком схемы и участком счисления пути не должен превышать 120°.
Рис. 58-2. Схема УСП типа "U", основанная на двух
радиомаяках VOR или на VOR и ОПРС (NDB)
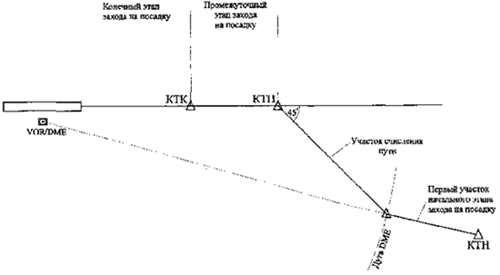
Рис. 58-3. Схема УСП типа "S", основанная на радиомаяке VOR/DME
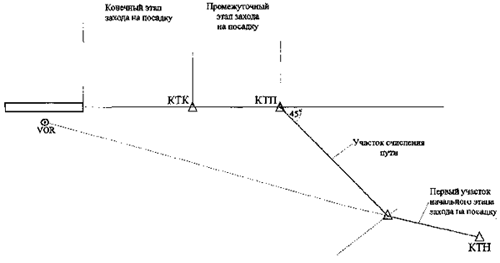
Рис. 58-4. Схема УСП типа S, основанная на двух радиомаяках
VOR или VOR и ОПРС (NDB)
Таблица 17-1
Минимальные значения длины участка счисления пути в схеме УСП типа "U" (в километрах).
Точка начала разворота фиксируется по отметке дальности DМЕ Абсолютная высота разворота не более 1500 м
|
Категория ВС |
Угол разворота на участок счисления пути | |||
|
|
Менее 45° |
45° - 59° |
60° - 89° |
90° - 120° |
|
А, В |
6 |
8 |
9 |
10 |
|
С, D |
9 |
11 |
13 |
15 |
Таблица 17-2
Минимальные значения длины участка счисления пути в схеме УСП типа "U" (в километрах).
Точка начала разворота фиксируется по отметке дальности DМЕ. Абсолютная высота разворота от 1500 до 3000 м
|
Категория ВС |
Угол разворота на участок счисления пути | |||
|
|
Менее 45° |
45° - 59° |
60° - 89° |
90° - 120° |
|
А, В |
6 |
9 |
11 |
12 |
|
С, D |
9 |
11 |
15 |
18 |
5.2.8.3. Построение схемы УСП типа "U", основанной на VОR+VОR или на VОR+ОПРС (NDB).
На рис. 58-2 показан пример схемы типа "U", основанной на внеаэродромном радиомаяке VОR или ОПРС (NDB), совпадающем с КТН. Расположение радиомаяка не позволяет построить линию пути с выходом в КТП в соответствии с критериями п.5.2.2. (см. рис. 41), т.к. угол разворота на посадочный курс превышает 120°. Использование схемы УСП типа "U" позволяет отказаться от применения схемы типа "ипподром" или от обратной схемы и выполнить выход на посадочную прямую по кратчайшему расстоянию.
Схема состоит из первого участка начального этапа захода на посадку, на котором выполняется полет с наведением по линии пути от радиомаяка VOR или ОПРС (NDB), расположенного в КТН. В контрольной точке, фиксируемой по пересечению радиала радиомаяка VOR, установленного на аэродроме (в принципе допускается и использование иначе расположенного радиомаяка VOR) выполняется разворот на участок счисления пути, задаваемый только магнитным курсом полета. Курс выбирается таким образом, чтобы угол между линией пути участка счисления пути и траекторией конечного этапа захода на посадку составлял 45°. При этом должны учитываться следующие ограничения:
- максимальная длина участка счисления пути не должна превышать 19 км;
- минимальная длина участка счисления пути должна соответствовать значениям, приведенным в таблицах 17-3 и 17-4;
- угол между первым участком схемы и участком счисления пути не должен превышать 105°.
Таблица 17-3
Минимальные значения длины участка счисления пути в схеме УСП типа "U" (в километрах).
Точка начала разворота фиксируется по пересечению радиала VOR Абсолютная высота разворота не более 1500 м
|
Категория ВС |
Угол разворота на участок счисления пути | |||
|
|
Менее 45° |
45° - 59° |
60° - 89° |
90° - 105° |
|
А, В |
10 |
11 |
12 |
12 |
|
С, D |
13 |
14 |
15 |
16 |
Таблица 17-4
Минимальные значения длины участка счисления пути в схеме УСП типа "U" (в километрах).
Точка начала разворота фиксируется по пересечению радиала VOR или МПР ОПРС (NDB).
Абсолютная высота разворота от 1500 до 3000 м
|
Категория ВС |
Угол разворота на участок счисления пути | ||||
|
|
Менее 45° |
45° - 59° |
60° - 89° |
90° - 105° | |
|
А, В |
11 |
12 |
13 |
14 | |
|
С, D |
15 |
16 |
18 |
19 | |
5.2.8.4. Построение схемы УСП типа "S". основанной на VOR/DМЕ.
На рис. 58-3 показан пример схемы типа "S", основанной на аэродромном радиомаяке VOR/DМЕ. В связи с отсутствием радионавигационного средства в КТН для выхода на посадочную прямую может быть использован либо заход с наведением по линии пути по дуге DМЕ, либо выход на аэродромное навигационное средство с последующем выполнением схемы типа "ипподром" или обратной схемы. Применение схемы УСП типа "S" позволяет упростить выполнение захода.
Схема состоит из первого участка начального этапа захода на посадку, на котором выполняется полет с наведением по линии пути по радиалу аэродромного радиомаяка VOR. В контрольной точке, фиксируемой по отметке дальности DME, выполняется разворот на участок счисления пути, задаваемый только магнитным курсом полета. Курс выбирается таким образом, чтобы угол между линией пути участка счисления пути и траекторией конечного этапа захода на посадку составлял 45°. При этом должны учитываться следующие ограничения:
- максимальная длина участка счисления пути не должна превышать 19 км;
- минимальная длина участка счисления пути не должна быть меньше 7 км;
- допуск на точку начала разворота не должен превышать ± 3,7 км.![]() Если длина первого участка начального этапа захода на посадку превышает 19 км, то минимальное значение длины участка счисления пути необходимо увеличить на 15% расстояния свыше 19 км:
Если длина первого участка начального этапа захода на посадку превышает 19 км, то минимальное значение длины участка счисления пути необходимо увеличить на 15% расстояния свыше 19 км:
где L min - минимальное значение длины участка счисления пути (в км);
L 1 - длина первого участка начального этапа захода на посадку (в км).
5.2.8.5. Построение схемы УСП типа "S". основанной на VOR+VOR или на VOR+ОПРС ( NDB).
На рис. 58-4 показан пример схемы типа "S", основанной на аэродромном радиомаяке VOR и внеаэродромном радионавигационном средстве VOR или ОПРС (NDB). В связи с отсутствием радионавигационного средства в КТН для выхода на посадочную прямую может быть использован выход на аэродромное навигационное средство с последующем выполнением схемы типа "ипподром" или обратной схемы. Применение схемы УСП типа "5" позволяет упростить выполнение захода. Схема состоит из первого участка начального этапа захода на посадку, на котором выполняется полет с наведением по линии пути по радиалу аэродромного радиомаяка VOR. В контрольной точке, фиксируемой по пересечению радиала радиомаяка VOR или МПР ОПРС (NDB) выполняется разворот на участок счисления пути, задаваемый только магнитным курсом полета. Курс выбирается таким образом, чтобы угол между линией пути участка счисления пути и траекторией конечного этапа захода на посадку составлял 45°. При этом должны учитываться следующие ограничения: - максимальная длина участка счисления пути не должна превышать 19 км; - минимальная длина участка счисления пути не должна быть меньше 9 км; - допуск на точку начала разворота не должен превышать ± 3,7 км. Если длина первого участка начального этапа захода на посадку превышает 19 км, то минимальное значение длины участка счисления пути необходимо увеличить на 15% расстояния свыше 19 км:
![]()
где L min - минимальное значение длины участка счисления пути (в км); L 1 - длина первого участка начального этапа захода на посадку (в км).
5.2.8.6. Зоны учета препятствий, Зоны учета препятствий, для схемы УСП типа "U". основанной, на VOR/DМЕ.
Построение зоны учета препятствии для схемы УСП типа "U", основанной на VОR/DМЕ, показано на рис. 58-5. Точки А и А? соответствуют ширине зоны учета препятствий конечного этапа захода на посадку в соответствии с используемой радиотехнической системой посадки. Если данное направление посадки оборудовано несколькими радиотехническими системами, то используется наибольшая ширина зоны учета препятствий. Для построения зоны учета препятствий используются параметры R (радиус внешней границы зоны учета препятствий) и (угол для построения внешней границы зоны учета препятствий), значения которых зависят от абсолютной высоты полета и категории воздушных судов. Значения параметра R приведены в табл. 17-5. Угол равен 22° для схем, предназначенных только для ВС категорий А и В, и 14° для остальных схем.
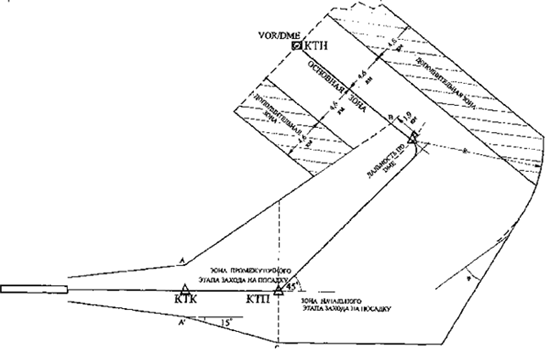
Рис. 58-5. Зоны учета препятствий схемы УСП типа "U",
основанной на радиомаяке VOR/DME
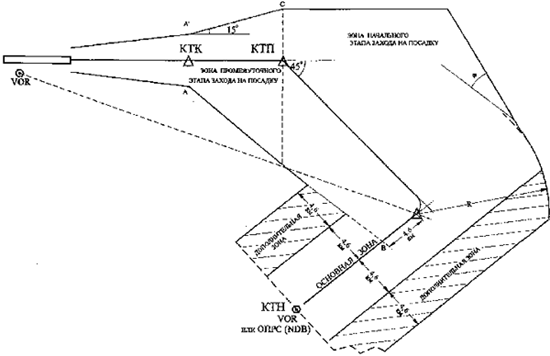
Рис. 58-6. Зоны учета препятствий схемы УСП типа "U",
основанной на двух VOR или на VOR и ОПРС (NDB).
Зоны учета препятствий для схемы УСП типа "U", основанной на двух
VOR или на VOR и ОПРС (NDB).
Построение зоны учета препятствий для схемы УСП типа "и", основанной на двух VOR или на VOR и ОПРС (NDB) показано на рис. 58-6. Точки А и А' соответствуют ширине зоны учета препятствий конечного этапа захода на посадку в соответствии с используемой радиотехнической системой посадки. Если данное направление посадки оборудовано несколькими радиотехническими системами, то используется наиболее широкая зона учета препятствий.
Для построения зоны учета препятствий используются параметры R (радиус внешней границы зоны учета препятствий) и (угол для построения внешней границы зоны учета препятствий), значения которых зависят от абсолютной высоты полета и категории воздушных судов. Значения параметра R приведены в табл. 17-6. Угол равен 22° для схем, предназначенных только для ВС категорий А и В, и 14° для остальных схем.
Таблица 17-5
Значения радиуса R в км для построения внешней границы зоны учета препятствий
для схемы УСП типа "U", основанной на VOR/DМЕ
|
Категория ВС |
Абсолютная высота 1500 м и менее |
Абсолютная высота от 1500 м до 3000 м |
|
А и В |
9,3 |
9,3 |
|
СиD |
10,2 |
12,0 |
Таблица 17-6
Значения радиуса R в км для построения границы зоны учета препятствий для схемы УСП типа "U", основанной на VOR+VOR или на VOR +ОПРС (NDB).
|
Категория ВС |
Абсолютная высота 1500 м и менее |
Абсолютная высота от 1500 м до 3000 м |
|
А и В |
10,2 |
11,1 |
|
СиD |
12,0 |
13,9 |
VOR+ОПРС (NDB).
Зоны учета препятствий для схемы УСП типа "S",
Построение зоны учета препятствий для схемы УСП типа "S" показано на рис. 58-7 и 58-8. Точки А и А' соответствуют ширине зоны учета препятствий конечного этапа захода на посадку в соответствии с используемой радиотехнической системой посадки. Если данное направление посадки оборудовано несколькими радиотехническими системами, то используется наиболее широкая зона учета препятствий. Все необходимые для построения зоны учета препятствий параметры указаны на рис. 58-7 и 58-8.
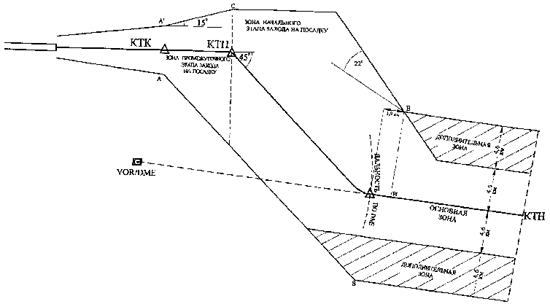
Рис. 58-7. Зоны учета препятствий схемы УСП типа "S",
основанной на радиомаяке VOR/DME
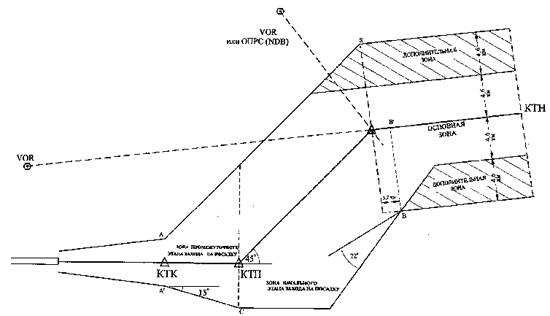
Рис. 58-8. Зоны учета препятствий схемы УСП типа "S",
основанной на двух VOR или на VOR и ОПРС(NDB)
5.2.8.7. Запасы высоты и определение минимальной безопасной высоты начального этапа захода на посадку.
Запас высоты над всеми препятствиями в основной части зоны составляет не менее 300 м. В дополнительных частях зон запас высоты линейно уменьшается до нуля на внешней границе.
Для определения минимальной безопасной высоты начального этапа захода на посадку (МБВн) необходимо:
- определить в метрах высоту самого высокого препятствия Нпрем.макс в основной части зоны учета препятствий;
- для каждого препятствия в дополнительных частях зоны учета препятствий определить графически в метрах расстояние Ii; от внешней границы зоны;
- для каждого препятствия в дополнительных частях зоны определить значение запаса высоты (в метрах) по формуле:
HHI=![]()
где SHi - половина ширины зоны (в метрах), соответствующая расположению препятствия (определяется графически).
- определить значение МБВн для основной части зоны:
МБВнdi = Hпреп.макс+ 300 м;
- для каждого препятствия дополнительной части зоны определить значение МБВнdi (в метрах):
МБВнdi = Hпреп.i+ HHI;
где Hпреп.i - высота в метрах 1-го препятствия в дополнительной части зоны;
HHI - запас высоты в метрах для этого препятствия в дополнительной части ЗОНЫ,
- определить значение МБВн как максимальное значение из МБВнdо и МБВнdi
Уменьшение МБВн путем введения дополнительных контрольных точек ступенчатого снижения допускается только на первом участке схемы УСП.
ПРИЛОЖЕНИЕ 2
ДОПОЛНЕНИЕ
к "Руководству по построению аэродромных схем и определению безопасных высот пролета препятствий" в части введения правил учета препятствий для захода на посадку по курсовому маяку РМС.
5.4.15. Курсовой маяк радиомаячной системы посадки.
5.4.15.1. Общие положения.
5.4.15.1.1.Область применения.
Положения настоящего раздела применяются по отношению к заходу на посадку только по курсовому радиомаяку РМС (далее по тексту -КРМ) при неработающем глиссадном радиомаяке, либо при его отсутствии. В разделе 5.4.15.2. приведены правила расчета минимальной безопасной высоты пролета препятствий для КРМ, установленного на продолжении осевой линии ВПП; в разделе 5.4.15.3. - для КРМ, смещенного относительно продолжения осевой линии ВПП. Во всех случаях, минимальная безопасная высота пролета препятствий для захода на посадку по КРМ устанавливается только, если КРМ отвечает требованиям I, II или III категории и опубликован в документах аэронавигационной информации как КРМ-1, КРМ-2 или КРМ-3.
5.4.15.1.2. Порядок расчета.
Для определения минимальной безопасной высоты пролета препятствий и угла наклона расчетной глиссады для захода на посадку по КРМ необходимо придерживаться следующего порядка действий.
Сначала оценивается угол наклона расчетной глиссады по препятствиям в зоне поверхности визуального этапа захода на посадку.
Далее определяются зоны, в которых необходимо учитывать препятствия. Для этого на карту препятствий наносятся контуры зон учета препятствий для каждого этапа захода на посадку и ухода на второй круг. Для каждого этапа определяется минимальная безопасная высота пролета препятствий путем прибавления определенных запасов высоты к высотам препятствий. Минимальная безопасная высота пролета препятствий для захода на посадку по КРМ определяется как наибольшая из этих высот.
Затем в целях возможного снижения минимумов могут быть скорректирован угол наклона расчетной глиссады и высота пролета контрольных точек ступенчатого снижения (если таковые установлены схемой захода на посадку).
5.4.15.2. КРМ установленный на продолжении осевой линии ВПП.
5.4.15.2.1. Промежуточный этап захода на посадку - см. п.5.4.4.2.
5.4.15.2.2. Предварительное определение угла наклона расчетной глиссады.
На величину УНГ могут оказать влияние препятствия в зоне поверхности предельных высот препятствий визуального этапа захода на посадку по КРМ.
Поверхность предельных высот препятствий визуального этапа захода на посадку по КРМ представляет собой наклонную плоскость, расположенную перед порогом ВПП. Поверхность начинается на расстоянии 60 м от порога ВПП. Начальная ширина поверхности составляет 150 м (по 75 м каждую сторону от продолжения осевой линии ВПП).
Боковые границы поверхности расходятся в стороны от продолжения осевой линии ВПП с градиентом 10%. Половина ширины зоны поверхности предельных высот препятствий визуального этапа захода на посадку по VOR на расстоянии Х от порога ВПП составляет:
S1/2 =![]()
Наклон поверхности зависит от УНГ и составляет 0,5 * УНГ.
Длина поверхности равна 2000 м (рис. 79). Для определения минимально возможного УНГ необходимо:
а) на карту препятствий нанести контуры поверхности предельных высот препятствий визуального этапа захода на посадку по КРМ;
б) для каждого из препятствий, попавших в пределы контура, рассчитать минимально возможный УНГ по формуле:
![]() УНГмин.= 2 arctg
УНГмин.= 2 arctg ![]()
где Нпреп. - высота препятствия над уровнем порога ВПП;
Х - координата препятствия.
Если наибольший из рассчитанных УНГмин. не превышает 2°30', то предварительный расчетный УНГ устанавливается в пределах от 2°30' до 3° (рекомендуемое значение 3°).
Если наибольший из рассчитанных УНГмин. находится в диапазоне от 2°30' до 5°, то УНГ устанавливается в этом диапазоне, причем предварительный расчетный УНГ должен быть больше или равен наибольшему из УНГ мин.
Если наибольший из рассчитанных УНГмин. превышает 5°, то необходимо переместить порог ВПП или уменьшить высоту препятствия, по которому определен УНГмин.
5.4.15.2.3. Конечный этап захода на посадку при отсутствии фиксированной точки конечного этапа захода на посадку (точки входа в глиссаду).
Зона учета препятствий.
Удаление входной границы конечного этапа захода на посадку соответствует расстоянию до порога ВПП точки выхода на посадочный курс или удалению от порога ВПП до дальней границы основной части зоны учета препятствий схемы типа "ипподром" или обратной схемы (в зависимости от того, что применялось). Выходная граница зоны конечного этапа проходит перпендикулярно линии пути конечного этапа захода на посадку в установленной схемой точке ухода на второй круг (рис. 92-9).
Если точка ухода на второй круг схемой не установлена, первоначально для расчета принимается значение удаления выходной зоны от порога ВПП (Lвых), равное 2000 м. В дальнейшем это значение может быть скорректировано, если полученное в результате расчетов значение минимальной безопасной высоты пролета препятствий для захода на посадку превышает 120 м. В этом случае удаление выходной границы зоны определяется по формуле:
Lвых =![]()
где Нмб - полученное в результате расчета значение минимальной безопасной высоты пролета препятствий;
-угол наклона расчетной глиссады.
При необходимости, после уточнения удаления выходной границы зоны от порога ВПП, расчет должен быть повторен.
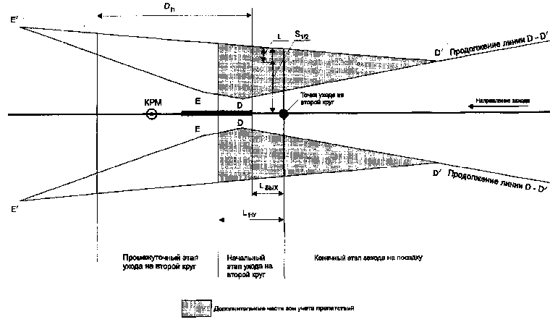
Рис. 92-9. Зоны учета препятствий для КРМ
Ширина зоны конечного этапа захода на посадку определяется в соответствии с рис. 92-9. Координаты точек D, D', Е и Е', которые используются для построения зон учета препятствий, в зависимости от расчетного УНГ расстояния от КРМ до порога ВПП приведены в Приложении 2. Часть зоны учета препятствий конечного этапа захода на посадку в пределах четырехугольников DD'ЕЕ' рассматривается как дополнительная часть зоны.
Запас высоты при отсутствии контрольной точки ступенчатого
снижения.
Минимальный запас высоты над препятствиями в основной части зоны конечного этапа захода на посадку зависит от удаления входной границы зоны от порога ВПП. Если удаление входной границы зоны не превышает 11 км от порога ВПП, значение минимального запаса высоты равно 90 м. Если удаление входной границы зоны превышает 11 км от порога ВПП, значение запаса высоты в основной части зоны определяется по формуле:
h = 90 + (Lв - 11 000)*0,0075
где h - запас высоты (в метрах);
Lв - удаление входной границы зоны конечного этапа захода на посадку от порога ВПП (в метрах).
В дополнительных частях зоны значение минимального запаса высоты равномерно уменьшается до нуля на внешней границы. Значение запаса высоты в дополнительных частях зоны hд в зависимости от места расположения препятствия, к высоте которого необходимо прибавить запас высоты, определяется по формуле:
hд =
где н - значение запаса высоты в основной части зоны;
L - расстояние от препятствия до внешней границы зоны;
S1/2 - половина ширины зоны.
Рассчитанное значение запаса высоты в метрах округляется до ближайшего большего целого числа.
Запас высоты при наличии контрольной точки ступенчатого снижения.
При наличии удобно расположенного навигационного средства (маркерный радиомаяк, ОПРС) на конечном этапе захода на посадку может устанавливаться контрольная точка ступенчатого снижения, определяемая по пролету этого средства. На схеме захода на посадку должно быть указано:
- средство, по которому устанавливается контрольная точка ступенчатого снижения;
-удаление контрольной точки ступенчатого снижения от порога ВПП;
- высота пролета контрольной точки ступенчатого снижения (Нктс), определяемая по формуле:tg
Нктс = Lктс* tg 15 (м),
где Lктс - удаление контрольной точки ступенчатого снижения от порога ВПП;
- угол наклона расчетной глиссады.
При Заходе на посадку снижение ниже установленной высоты пролета контрольной точки ступенчатого снижения до пролета этой точки недопустимо .
На контрольную точку ступенчатого снижения устанавливается зона допуска в зависимости от типа средства, используемого для фиксирования контрольной точки.
Минимальный запас высоты над препятствиями в основной части зоны после пролета контрольной точки ступенчатого снижения может быть уменьшен:
- если контрольная точка ступенчатого снижения расположена не далее 11 км от порога ВПП - до значения 75 м (рис. 92-10);
- если контрольная точка ступенчатого снижения расположена далее 11 км от порога ВПП - до значения, определяемого по формуле:
н= 75+(Lс- 11 000)*0,0075,
где н - запас высоты (в метрах);
Lс - удаление контрольной точки ступенчатого снижения от порога ВПП (в метрах).
В дополнительных частях зоны значение минимального запаса высоты равномерно уменьшается до нуля на внешней границы. Значение запаса высоты в дополнительных частях зоны Анд в зависимости от места расположения препятствия, к высоте которого необходимо прибавить запас высоты, определяется по формуле:
hд =
где н - значение запаса высоты в основной части зоны;
L - расстояние от препятствия до внешней границы зоны;
S1/2 - половина ширины зоны.
Рассчитанное значение запаса высоты в метрах округляется до ближайшего большего целого числа.
Минимальная безопасная высота пролета препятствий конечного этапа
захода на посадку.
Минимальная безопасная высота пролета препятствий конечного этапа захода на посадку (Нмвз) определяется путем прибавления запасов высоты к высотам препятствий, расположенным в пределах зоны учета препятствий конечного этапа захода на посадку. Для последующих расчетов принимается наибольшее из полученных значений.
Рис. 92-10. Контрольная точка ступенчатого снижения в схеме захода на посадку по КРМ.
При установлении контрольной точки ступенчатого снижения из рассмотрения могут быть исключены препятствия, расположенные в пределах от входной границы зоны учета препятствии до контрольной точки ступенчатого снижения для которых выполняется соотношение:
нпреп. + н Нктс,
где нпреп. ~ высота препятствия в указанной зоне;
н - запас высоты;
Нктс -установленная схемой захода на посадку высота пролета контрольной точки ступенчатого снижения.
Препятствия, не пересекающие поверхность с наклоном 15%, проходящую в районе контрольной точки ступенчатого снижения, как это показано на рис. 92-10, могут не учитываться при определении минимальной безопасной высоты пролета препятствий для захода на посадку.
5.4.15.2.4. Конечный этап захода на посадку при наличии фиксированной точки конечного этапа захода на посадку (точки входа в глиссаду).
Зона учета препятствий.
Удаление входной границы конечного этапа захода на посадку соответствует расстоянию до порога ВПП контрольной точки конечного этапа захода на посадку (точки входа в глиссаду). Выходная граница зоны конечного этапа проводит перпендикулярно линии пути конечного этапа захода на посадку в установленной схемой точке ухода на второй круг (рис. 92-11).
Если точка ухода на второй круг схемой не установлена, первоначально для расчета принимается значение удаления выходной зоны от порога ВПП (Lвых), равное 1600 м. В дальнейшем это значение может быть скорректировано, если полученное в результате расчетов значение минимальной безопасной высоты пролета препятствий для захода на посадку превышает 100 м. В этом случае удаление выходной границы зоны (Lвых) определяется по формуле:
![]()
где нмб - полученное в результате расчета значение минимальной безопасной высоты пролета препятствий;
- угол наклона расчетной глиссады.
При необходимости, после уточнения удаления выходной границы зоны от порога ВПП, расчет должен быть повторен.
Ширина зоны конечного этапа захода на посадку определяется в соответствии с рис. 92-9. Координаты точек D, D', Е и Е', которые используются для построения зон учета препятствий, в зависимости от расчетного УНГ расстояния от КРМ до порога ВПП приведены в Приложении 2. Часть зоны учета препятствий конечного этапа захода на посадку в пределах четырехугольников DD'ЕЕ" рассматривается как дополнительная часть зоны.
Запас высоты при отсутствии контрольной точки ступенчатого снижения.
Минимальный запас высоты над препятствиями в основной части зоны конечного этапа захода на посадку зависит от удаления входной границы зоны от порога ВПП. Если удаление входной границы зоны не превышает 11 км от порога ВПП, значение минимального запаса высоты равно 75 м. Если удаление входной границы зоны превышает 11 км от порога ВПП, значение запаса высоты зоны определяется по формуле:
н = 75 + (Lв - 11 000)*0,0075,
где н - запас высоты (в метрах);
Lб - удаление входной границы зоны конечного этапа захода на посадку от порога ВПП (в метрах).
В дополнительных частях зоны значение минимального запаса высоты равномерно уменьшается до нуля на внешней границы. Значение запаса высоты в дополнительных частях зоны нд в зависимости от места расположения препятствия, к высоте которого необходимо прибавить запас высоты, определяется по формуле:

где н - значение запаса высоты в основной части зоны;
L-расстояние от препятствия до внешней границы зоны;
S1/2 - половина ширины зоны.
Рассчитанное значение запаса высоты в метрах округляется до ближайшего большего целого числа.
Запас высоты при наличии контрольной точки ступенчатого снижения.
При наличии удобно расположенного навигационного средства (маркерный радиомаяк, ОПРС, радиомаяк VOR) на конечном этапе захода на посадку может устанавливаться контрольная точка ступенчатого снижения, определяемая по пролету этого средства (как правило не более одной). При наличии средства измерения дальности (DМЕ, дальномерный канал РСБН, диспетчерский радиолокатор) на конечном этапе захода на посадку может быть установлено несколько контрольных точек ступенчатого снижения. На схеме захода на посадку должно быть указано:
- средство, по которому устанавливается контрольная точка ступенчатого снижения;
-удаление контрольной точки ступенчатого снижения от порога ВПП;
- высота пролета контрольной точки ступенчатого снижения (Нктс);
определяемая по формуле:
Нктс = Lктс* tg + 15 (м),
где Lктс - удаление контрольной точки ступенчатого снижения от порога ВПП;
- угол наклона расчетной глиссады.
При заходе на посадку снижение ниже установленной высоты пролета контрольной точки ступенчатого снижения до пролета этой точки недопустимо.
На контрольную точку ступенчатого снижения устанавливается зона допуска в зависимости от типа средства, используемого для фиксирования контрольной точки.
Минимальный запас высоты над препятствиями в основной части зоны после пролета контрольной точки ступенчатого снижения может быть уменьшен (если контрольная точка конечного этапа захода на посадку установлена далее 11 км от порога ВПП и предварительно определенный минимальный запас высоты над препятствиями превышает 75 м):
- если контрольная точка ступенчатого снижения расположена не далее 11 км от порога ВПП - до значения 75 м;
- если контрольная точка ступенчатого снижения расположена далее 11 км от порога ВПП - до значения, определяемого по формуле:
н = 75 + (Lс - 11000)*0,0075,
где н - запас высоты (в метрах);
Lс - удаление контрольной точки ступенчатого снижения от порога ВПП (в метрах).
В дополнительных частях зоны значение минимального запаса высоты равномерно уменьшается до нуля на внешней границы. Значение запаса высоты в дополнительных частях зоны нд в зависимости от места расположения препятствия, к высоте которого необходимо прибавить запас высоты, определяется по формуле:
где н - значение запаса высоты в основной части зоны;
L-расстояние от препятствия до внешней границы зоны;
S1/2 - половина ширины зоны.
Рассчитанное значение запаса высоты в метрах округляется до ближайшего большего целого числа.
Минимальная безопасная высота пролета препятствии конечного этапа захода на посадку.
Минимальная безопасная высота пролета препятствий конечного этапа захода на посадку (нмбз) определяется путем прибавления запасов высоты к высотам препятствий, расположенным в пределах зоны учета препятствий конечного этапа захода на посадку. Для последующих расчетов принимается наибольшее из полученных значений.
При установлении контрольной точки ступенчатого снижения из рассмотрения могут быть исключены препятствия, расположенные в пределах от входной границы зоны учета препятствий до контрольной точки (при установлении нескольких контрольных точек ступенчатого снижения - и в пределах от одной точки до другой) ступенчатого снижения для которых выполняется соотношение:
нпреп. + н Нктс,
где нпреп. ~ высота препятствия в указанной зоне;
н - запас высоты;
Нктс - установленная схемой захода на посадку высота пролета контрольной точки ступенчатого снижения.
Препятствия, не пересекающие поверхность с наклоном 15%, проходящую в районе контрольной точки ступенчатого снижения, как это показано на рис. 92-10, могут не учитываться при определении минимальной безопасной высоты пролета препятствий для захода на посадку.
5.4.15.2.4. Начальный этап ухода на второй круг.
Зона учета препятствий.
Входная граница зоны учета препятствий начального этапа ухода на второй круг совпадает с выходной границей зоны учета препятствий конечного этапа захода на посадку. Выходная граница расположена от входной на расстоянии, определяемом по таблице 39-1.
Ширина зоны начального этапа ухода на второй круг определяется в соответствии с рис. 92-9. Координаты точек D,D',Е и Е', которые используются для построения зон учета препятствий, в зависимости от расчетного УНГ и расстояния от КРМ до порога ВПП приведены в Приложении 2. Часть зоны учета препятствий начального этапа ухода на второй круг посадку в пределах четырехугольников DD'ЕЕ' рассматривается как дополнительная часть зоны.
Запас высоты.
Запасы высоты в зоне начального этапа ухода на второй круг такие же, как и в примыкающей к ней зоне конечного этапа захода на посадку.
Минимальная безопасная высота пролета препятствий начального этапа ухода на второй круг.
Минимальная безопасная высота пролета препятствий начального этапа ухода на второй круг (нмбу1) определяется путем прибавления запасов высоты к высотам препятствий, расположенным в пределах основной и дополнительных частей зоны учета препятствий начального этапа ухода на второй круг. Для последующих расчетов принимается наибольшее из полученных значений.
5.4.15.2.5.Промежуточный этап ухода на второй круг.
Зона учета препятствий.
Входная граница зоны учета препятствий промежуточного этапа ухода на второй круг совпадает с выходной границей зоны учета препятствий начального этапа ухода на второй круг.
Зона продолжается за порогом ВПП до расстояния Dп, равного:
Dп = 40 (Н1 - 30)
где Н1 - установленная по схеме высота первого разворота при уходе на второй круг). Во всех случаях длина зоны не должна превышать 15000 м.
Ширина зоны промежуточного этапа ухода на второй круг определяется в соответствии с рис. 92-9. Координаты точек D,D',Е и Е', которые используются для построения зон учета препятствий, в зависимости от расчетного УНГ расстояния от КРМ до порога ВПП приведены в Приложении 2. Часть зоны учета препятствий промежуточного этапа ухода на второй круг посадку в пределах четырехугольников D,D',Е,Е' рассматривается как дополнительная часть зоны.
Поверхность оценки препятствий промежуточного
этапа ухода на второй круг.
Поверхность оценки препятствий промежуточного этапа ухода на второй круг (рис. 92-8) в плане совпадает с зоной учета препятствий. Поверхность начинается на высоте 45 м над уровнем порога ВПП для посадки и простирается в направлении ухода на второй круг с наклоном 2,5% (1:40). Высота поверхности (Нпов) над уровнем порога ВПП для посадки на удалении Lу от начала равна:
Нпов = 0,025*Lу + 45 (м)
Запас высоты.
Запас высоты над препятствиями, пересекающими поверхность ухода на второй круг равен 30 м.
Минимальная безопасная высота пролета препятствий промежуточного этапа ухода на второй круг.
Минимальная безопасная высота пролета препятствий промежуточного этапа ухода на второй круг (Нмбу2) составляет:
Нмбу2 = hмах + 30 М
где hмах - величина наибольшего превышения препятствий над поверхностью оценки препятствии зоны промежуточного этапа ухода на второй круг.
5.4.15.2.6-Минимальная безопасная высота пролета препятствий для захода на посадку по КРМ.
Минимальная безопасная высота пролета препятствий для захода на посадку по КРМ равна наибольшей из высот: Hмбз, Hмбу1 Нмву2
5.4.15.3. КРМ, смещенный относительно продолжения осевой линии ВПП.
5.4.15.3.1. Установление линии пути.
Если КРМ установлен в стороне от продолжения осевой линии ВПП, линия пути конечного этапа захода на посадку устанавливается под углом к продолжению осевой линии ВПП. Точка пересечения линии пути конечного этапа захода на посадку и продолжения осевой линии ВПП должна находиться на расстоянии не менее 1400 м от порога ВПП (рис. 92-2). При этом угол пересечения должен быть не более:
- 30° для схем захода на посадку, предназначенных только для воздушных судов категории А и В;
- 15° для остальных схем.
Кроме того, может быть установлена линия пути конечного этапа захода на посадку, не пересекающая продолжение осевой линии ВПП перед порогом ВПП (рис. 92-3). При этом, должны выполняться следующие условия:
- угол между линией пути конечного этапа захода на посадку и продолжением осевой линии ВПП должен быть менее 5°;
- на расстоянии 1400 м от порога ВПП линия пути должна проходить не далее 150 м от продолжения осевой линии ВПП.
Во всех случаях, когда линия пути конечного этапа захода на посадку проходит под углом 5° и более по отношению к продолжению осевой линии ВПП значение минимальной безопасной высоты пролете препятствий для такой схемы должны быть не менее:
115 м - для ВС категории А;
140 м - для ВС категории D;
165 м - для ВС категории С и D. 5.4.15.3.2.Промежуточный этап захода на посадку - см. п. 5.4.4.2.
5.4.15-З.З.Предварительное определение угла наклона расчетной глиссады.
Предварительное определение угла наклона глиссады выполняется в соответствии с требованиями п.5.4.15.2.2., причем зона поверхности предельных высот препятствий визуального этапа захода на посадку строится относительно к фактической ВПП.
5.4.15.3.4. Правила расчета минимальных безопасных высот пролета препятствий для захода на посадку.
Для расчета минимальных безопасных высот пролета препятствий для захода на посадку по КРМ, смещенного относительно продолжения осевой линии ВПП применяются те же правила, что и для КРМ, расположенного на продолжении осевой линии ВПП. При этом, зоны учета препятствий и все расчеты минимальных безопасных высот пролета препятствий для захода на посадку выполняются относительно условной ВПП, расположенной на продолжении линии курса курсового радиомаяка - заданной линии пути захода на посадку. Эта условная ВПП имеет такую же длину, превышение порога и удаление порога от точки пересечения линии пути конечного этапа захода на посадку и продолжения осевой линии фактической ВПП, что и для фактической ВПП (рис. 92-11).
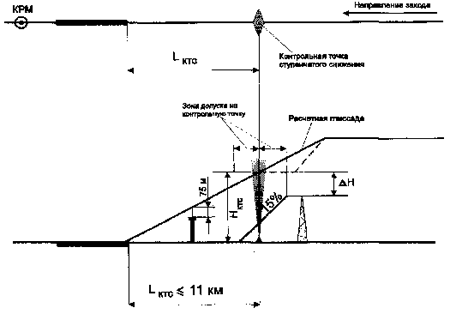
Рис. 92.10 Контрольная точка ступенчатого снижения в схеме захода на посадку по КРМ.
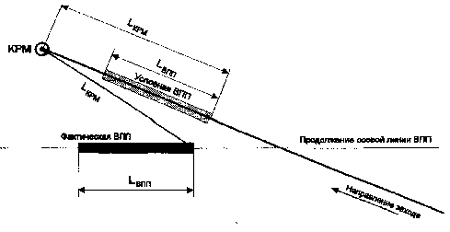
Рис. 92.11 Расположение условной ВПП.
Личный кабинет:
доступно после авторизации Компьютерное зрение сможет точнее выявлять рак по характеру клеточного...
Компьютерное зрение сможет точнее выявлять рак по характеру клеточного...  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2024 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке