РУКОВОДЯЩИЕ УКАЗАНИЯ
ПО БАЛАНСИРОВКЕ РОТОРОВ ТУРБОАГРЕГАТОВ
В СОБСТВЕННЫХ ПОДШИПНИКАХ
СОСТАВЛЕНЫ Бюро технической информации ОРГРЭС
Авторы: канд. техн. наук М.А.Брановский, инженеры М.М.Исакович, И.С.Лисицын, С.И.Микунис, Б.X.Перчанок, канд. техн. наук Б.Т.Рунов, инженеры А.П.Сивков, А.М.Швецов
Редактор инж. Л.С.Моргулис
УТВЕРЖДЕНЫ Главным инженером Технического управления по эксплуатации энергосистем (С.Молокановым)
В настоящих Руководящих указаниях описаны методы и технология балансировки двухопорных роторов турбоагрегатов в условиях электростанций и заводов-изготовителей. Приведены основы теории колебаний и уравновешивания гибких роторов, знакомство с которыми облегчает усвоение практических методов балансировки. Кратко описаны вибрационные исследования, проводимые для выявления характера неуравновешенности ротора и отдельных факторов, влияющих на вибрационное состояние турбоагрегата.
Руководящие указания предназначены для инженерно-технического персонала, выполняющего монтаж, наладку, ремонт и балансировку роторов крупных энергетических машин.
ВВЕДЕНИЕ
Надежность и экономичность эксплуатации турбоагрегатов в значительной степени определяются их вибрационным состоянием.
Одной из наиболее важных технологических операций, при помощи которых вибрация агрегата доводится до нормы, является динамическая балансировка роторов. В задачу динамической балансировки входит устранение повышенной вибрации машины, возникающей от неуравновешенности ее вращающихся частей. Главными причинами появления неуравновешенности у роторов турбин и генераторов являются:
а) нарушения круговой симметрии сечений ротора, заложенные в конструкции и возникающие из-за неточностей механической обработки и сборки;
б) прогиб, связанный с остаточными деформациями от механической и термической обработки поковки;
в) неравномерное смещение элементов обмотки ротора (витков катушек и клиньев, изоляционных прокладок);
г) ослабление посадки бандажных и центрирующих колец, турбинных дисков и полумуфт;
д) упругий прогиб ротора из-за неравномерного нагрева или охлаждение его по сечению (так называемая тепловая разбалансировка).
Неуравновешенность может появиться после ремонта ротора турбины в результате:
снятия с вала и посадки на него дисков, полумуфт и других крупных деталей;
частичного или полного перелопачивания ротора или удаления лопаток;
правки вала (независимо от достигнутой точности).
При ремонте ротора генератора неуравновешенность может возникнуть после:
полной или частичной замены обмотки и клиньев;
неправильной посадки на вал бандажных и центрирующих колец, колеса вентилятора (компрессора) или отдельных его лопаток, контактных колец и полумуфт.
В ряде случаев причинами появления неуравновешенности роторов генераторов служат усадка изоляции (лаков) и старение материала ротора, наиболее заметно проявляющиеся в первый год эксплуатации турбоагрегата.
Балансировку ротора в собственных подшипниках следует проводить только после устранения всех возможных дефектов и неисправностей, способных вызвать повышенную вибрацию и не связанных с неуравновешенностью ротора. Поэтому балансировке обязательно должно предшествовать вибрационное исследование турбоагрегата с целью установления причин повышенной вибрации. Кроме того, в процессе исследований должны быть получены и уточнены вибрационные характеристики, необходимые для проведения балансировки.
Перед балансировкой в собственных подшипниках вновь изготовленные роторы грубо уравновешиваются статически на параллелях или проходят предварительную балансировку на балансировочных станках.
Роторы турбин проходят обязательную проверку и в случае необходимости балансировку на станке после ремонта, связанного с пересадкой или перелопачиванием дисков, заменой и пересадкой полумуфт, разгрузочных поршней (думмисов) и других крупных деталей, а также после правки вала (независимо от достигнутой точности).
Если перед ремонтом наблюдалась повышенная вибрация подшипников турбины, то независимо от характера выполняемых ремонтных работ роторы турбин проверяются на балансировочном станке.
Уравновешивание роторов генераторов на станке целесообразно проводить после ремонта, связанного с полной или частичной перемоткой или переклиновкой ротора, т.е. после замены деталей, в результате которой может появиться большая неуравновешенность.
Применение низкооборотных (100-500 об/мин) балансировочных станков целесообразно для окончательного уравновешивания так называемых жестких роторов, у которых рабочая скорость вращения лежит ниже первой критической. Во всех остальных случаях применение станков не снимает проблемы балансировки роторов в собственных подшипниках.
Рост единичной мощности турбоагрегатов вызвал увеличение длины и веса роторов, что привело к снижению их критических скоростей. Широкое применение получили гибкие роторы, критические скорости которых лежат ниже рабочей скорости вращения. В эксплуатации уже сейчас находятся турбоагрегаты, у которых отдельные роторы работают выше второй критической скорости.
Колебания жестких и гибких роторов качественно различаются за счет появления у последних динамического прогиба под влиянием неуравновешенности и балансировочных грузов. Это приводит к тому, что применение методов балансировки жестких роторов при уравновешивании гибких роторов не всегда дает положительные результаты.
В последние годы некоторые организации (ЛФ ВНИИЭМ, ЦКБ Главэнергоремонта, ВТИ и др.) разработали и внедрили методы уравновешивания двухопорных роторов по формам свободных изгибных колебаний. Благодаря этому удалось повысить эффективность балансировки и улучшить вибрационное состояние действующих турбоагрегатов.
Важным преимуществом нового метода является возможность его распространения на уравновешивание роторов, имеющих любое соотношение рабочей и критических скоростей. Это позволило создать единый метод уравновешивания как жестких, так и гибких роторов энергетических машин.
В настоящей работе вопросы балансировки изложены применительно к роторам генераторов. Практика показала, что вибрация турбоагрегата наиболее часто вызывается неуравновешенностью ротора генератора.
Однако описываемые ниже методы уравновешивания целиком применимы к роторам паровых турбин, а также синхронных компенсаторов, электродвигателей, турбокомпрессоров и других машин, используемых на электростанциях и в различных энергетических установках.
В практике балансировки роторов встречаются отдельные сложные случаи, требующие углубленного анализа. С целью облегчения подобного анализа ниже приводятся основные сведения по теории колебаний и уравновешивания гибких роторов. Для усвоения методов и технологии балансировки этот материал не является обязательным и может быть опущен.
Настоящие Руководящие указания выпущены взамен следующих материалов:
1. Инструкция по динамической балансировке роторов паровых турбин и генераторов и статической балансировке деталей роторов, раздел II. Динамическая балансировка роторов генераторов в собственных подшипниках. Госэнергоиздат, 1955.
2. Руководящие указания по уравновешиванию паровых турбоагрегатов с гибкими роторами. БТИ ОРГРЭС, 1963.
3. Временная инструкция по уравновешиванию роторов турбогенераторов в собственных подшипниках. Изд-во "Энергия", 1965.
1. ОСОБЕННОСТИ КОЛЕБАНИЙ ГИБКИХ РОТОРОВ
Роторы турбины и генератора опираются на выносные (стояковые) или встроенные в статор (щитовые) подшипники. В свою очередь подшипники и статоры турбоагрегатов установлены на общем фундаменте. Для точного анализа колебаний этой системы, возникающих при вращении неуравновешенного ротора, необходимо учитывать массу, жесткость и демпфирующие свойства всех ее элементов. При этом решение задачи балансировки ротора значительно усложняется.
Однако с достаточной для практики точностью можно ограничиться рассмотрением системы, состоящей из ротора на двух упругих опорах (рис.1). Опоры принимаются невесомыми и изотропными, т.е. имеющими одинаковую жесткость в любом направлении, перпендикулярном оси вращения ротора. Условие изотропности опор на самом деле не имеет места, однако это обстоятельство не нарушает основных положений теории и сравнительно легко учитывается в практике.
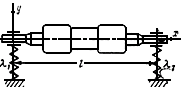
Рис.1. Система ротор-опоры:![]() ,
, ![]() - коэффициенты податливости опор
- коэффициенты податливости опор
В определенных пределах рассматриваемую систему можно считать линейной. При этом прогиб в любой ее точке прямо пропорционален величине небаланса, и сумма прогибов от любого числа отдельных действующих источников неуравновешенности равна прогибу от их суммарного действия.
В дальнейшем рассматриваемая система именуется "ротор-опоры".
По упругим свойствам роторы делятся на жесткие и гибкие. Жесткий ротор не меняет своей конфигурации под действием приложенных к нему сил, тогда как гибкие роторы при тех же условиях испытывают заметный упругий прогиб, зависящий не только от величины, но и от характера распределения нагрузки.
Ротор можно рассматривать как упругую балку круглого переменного (по длине) сечения, опирающуюся на две опоры (рис.1). Тогда при заданной системе внешних сил ![]() , действующих на ротор, можно графически или путем численного интегрирования определить его прогиб
, действующих на ротор, можно графически или путем численного интегрирования определить его прогиб ![]() . Обозначим всю совокупность операций, которые надо произвести для того, чтобы по заданной нагрузке определить прогиб ротора, буквой
. Обозначим всю совокупность операций, которые надо произвести для того, чтобы по заданной нагрузке определить прогиб ротора, буквой ![]() и назовем ее оператором нагружения. Тогда можно записать символическое выражение
и назовем ее оператором нагружения. Тогда можно записать символическое выражение
![]() . (1)
. (1)
Поскольку к каждому сечению ротора могут быть приложены силы различного радиального направления, то, связав с ротором прямоугольную систему координат с осями ![]() и
и ![]() , перпендикулярную оси вращения, можно описать любой вектор нагрузки
, перпендикулярную оси вращения, можно описать любой вектор нагрузки ![]() как комплексное число
как комплексное число
![]() ,
,
вещественная и мнимая части которого суть проекции сил на координатные оси ![]() и
и ![]() . Тогда прогиб
. Тогда прогиб ![]() также будет комплексным числом
также будет комплексным числом
![]() .
.
В этом случае выражение (1) сохранит свой вид для любой системы сил, перпендикулярных оси вращения ротора.
Если ротор вращается, то положение линии центров тяжести сечений определится функцией ![]() , являющейся геометрической суммой начального эксцентрицитета
, являющейся геометрической суммой начального эксцентрицитета ![]() массы ротора относительно оси вращения и упругого прогиба
массы ротора относительно оси вращения и упругого прогиба ![]() , возникающего при вращении ротора, имеющего начальный эксцентрицитет (рис.2).
, возникающего при вращении ротора, имеющего начальный эксцентрицитет (рис.2).
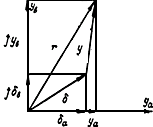
Рис.2. Разложение начального эксцентрицитета и динамического прогиба ротора на составляющие
Пусть вал с распределенной массой ![]() вращается с некоторой угловой скоростью
вращается с некоторой угловой скоростью ![]() . Тогда величина центробежной нагрузки будет равна:
. Тогда величина центробежной нагрузки будет равна:
![]() .
.
При этом согласно формуле (1) динамический (упругий) прогиб ротора будет определяться выражением
![]() .
.
Окончательно уравнение динамического прогиба ротора, записанное в операторной форме, имеет вид:
![]() , (2)
, (2)
где ![]() .
.
Существенно отметить, что при учете действия сил трения вид уравнения (2) не меняется. Функция ![]() лишь становится комплексной, и ее мнимая часть будет пропорциональна коэффициенту трения.
лишь становится комплексной, и ее мнимая часть будет пропорциональна коэффициенту трения.
Можно показать, что путем обычных математических преобразований операторное уравнение колебаний ротора приводится к дифференциальному уравнению колебаний известного вида и обратно.
Рассмотрим уравнение свободных колебаний ротора ![]() 0. Тогда из выражения (2) имеем:
0. Тогда из выражения (2) имеем:
![]() . (3)
. (3)
Это уравнение имеет очевидное решение ![]() 0, означающее, что полностью уравновешенный вал не имеет динамического прогиба. Однако при определенных скоростях вращения
0, означающее, что полностью уравновешенный вал не имеет динамического прогиба. Однако при определенных скоростях вращения ![]() , называемых критическими, уравнение свободных изгибных колебаний имеет отличные от нуля решения
, называемых критическими, уравнение свободных изгибных колебаний имеет отличные от нуля решения ![]() . Эти решения в проекции на неподвижную плоскость будут представляться как изгибные колебания ротора. Они называются формами свободных изгибных колебаний и представляют собой плоские кривые.
. Эти решения в проекции на неподвижную плоскость будут представляться как изгибные колебания ротора. Они называются формами свободных изгибных колебаний и представляют собой плоские кривые.
Формы свободных колебаний ![]() (
(![]() 1, 2, 3, ...) обладают важным свойством ортогональности, используемым при балансировке роторов. Для простоты рассмотрим свойство ортогональности на примере ротора постоянного сечения на жестких опорах. Для такого ротора формы свободных изгибных колебаний имеют вид:
1, 2, 3, ...) обладают важным свойством ортогональности, используемым при балансировке роторов. Для простоты рассмотрим свойство ортогональности на примере ротора постоянного сечения на жестких опорах. Для такого ротора формы свободных изгибных колебаний имеют вид:
![]() (
(![]() 1, 2, 3 ...).
1, 2, 3 ...).
Пусть массы ![]() распределены вдоль ротора с эксцентрицитетом относительно оси вращения, изменяющимся по закону
распределены вдоль ротора с эксцентрицитетом относительно оси вращения, изменяющимся по закону ![]() . Тогда в каждой точке ротора, вращающегося со скоростью
. Тогда в каждой точке ротора, вращающегося со скоростью ![]() , действует сила
, действует сила ![]() . Подсчитаем работу всех сил, действующих вдоль ротора на прогибе
. Подсчитаем работу всех сил, действующих вдоль ротора на прогибе ![]() , для чего возьмем интеграл по длине ротора
, для чего возьмем интеграл по длине ротора
 .
.
Учитывая, что для рассматриваемого ротора ![]() const, получим:
const, получим:
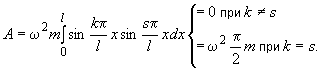
Рассматриваемый интеграл иллюстрирует известное из математического анализа свойство ортогональности, заключающееся в том, что при ![]() интеграл равен нулю. Применительно к рассматриваемому случаю это означает, что возмущающая сила, действующая вдоль ротора по
интеграл равен нулю. Применительно к рассматриваемому случаю это означает, что возмущающая сила, действующая вдоль ротора по ![]() -й форме свободных изгибных колебаний, не создает положительной работы и, следовательно, не вызывает прогиба по любой
-й форме свободных изгибных колебаний, не создает положительной работы и, следовательно, не вызывает прогиба по любой ![]() -й форме свободных изгибных колебаний, если только
-й форме свободных изгибных колебаний, если только ![]() .
.
Для ротора переменного сечения [![]() const] условие ортогональности также имеет место и записывается в виде
const] условие ортогональности также имеет место и записывается в виде
 (4)
(4)
Таким образом, грузы, поставленные на ротор в соответствии с выражением ![]() , могут вызвать (или устранить) только ту составляющую прогиба, которая определяется
, могут вызвать (или устранить) только ту составляющую прогиба, которая определяется ![]() -й формой колебаний.
-й формой колебаний.
Функция ![]() , представляющая собой произведение ординат кривой распределения массы ротора по его длине на соответствующие ординаты
, представляющая собой произведение ординат кривой распределения массы ротора по его длине на соответствующие ординаты ![]() -й формы колебаний, определяет закон распределения грузов на роторе при балансировке и называется
-й формы колебаний, определяет закон распределения грузов на роторе при балансировке и называется ![]() -й формой неуравновешенности.
-й формой неуравновешенности.
Нетрудно заметить, что для ротора постоянного сечения [![]() =const] формы неуравновешенности и формы свободных изгибных колебаний идентичны.
=const] формы неуравновешенности и формы свободных изгибных колебаний идентичны.
Динамический прогиб вала, являющийся решением уравнения (2), может быть представлен в виде ряда, разложенного по формам свободных изгибных колебаний,
![]() . (5)
. (5)
Здесь ![]() - зависящий от скорости вращения комплексный коэффициент ряда, определяющий величину и угловое положение
- зависящий от скорости вращения комплексный коэффициент ряда, определяющий величину и угловое положение ![]() -й составляющей динамического прогиба во вращающейся системе координат (
-й составляющей динамического прогиба во вращающейся системе координат (![]() , б).
, б).
Различные составляющие прогиба, пропорциональные ![]() , могут быть ориентированы под разными углами. В этом случае, геометрически складываясь, они образуют динамический прогиб в виде пространственной кривой.
, могут быть ориентированы под разными углами. В этом случае, геометрически складываясь, они образуют динамический прогиб в виде пространственной кривой.
Начальный эксцентрицитет ![]() также можно представить в виде ряда, разложенного по формам свободных изгибных колебаний,
также можно представить в виде ряда, разложенного по формам свободных изгибных колебаний,
![]() . (6)
. (6)
Здесь ![]() - комплексный коэффициент ряда, определяющий величину и угловое положение
- комплексный коэффициент ряда, определяющий величину и угловое положение ![]() -й составляющей начального эксцентрицитета во вращающейся системе координат (
-й составляющей начального эксцентрицитета во вращающейся системе координат (![]() , б).
, б).
Используя разложения (5) и (6) и уравнения (2) и (3), можно получить:
 . (7)
. (7)
При этом ![]() зависит только от скорости вращения и коэффициента затухания, а
зависит только от скорости вращения и коэффициента затухания, а ![]() - только от характера распределения неуравновешенности. С учетом уравнения (7) выражение (5) записывается в виде
- только от характера распределения неуравновешенности. С учетом уравнения (7) выражение (5) записывается в виде
 . (8)
. (8)
Заменяя по известной формуле угловую скорость ![]() (рад/сек) скоростью вращения ротора
(рад/сек) скоростью вращения ротора ![]() (об/мин) и пренебрегая влиянием трения, преобразуем выражение (7) в следующее:
(об/мин) и пренебрегая влиянием трения, преобразуем выражение (7) в следующее:
 , (9)
, (9)
и тогда
 . (10)
. (10)
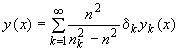
Суммарный динамический прогиб ротора и его составляющие в предположении, что они располагаются в одной плоскости и скорость вращения несколько выше второй критической, представлены на рис.3.
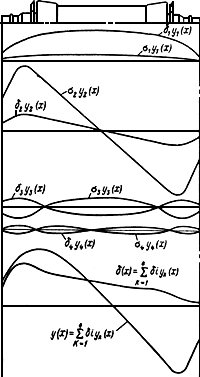
Рис.3. Динамический прогиб ротора при раздельном и суммарном действии первых четырех
форм неуравновешенности
На этом же рисунке условно изображен начальный эксцентрицитет ротора, суммарный и разложенный на составляющие.
Из формулы (10) следует, что если ![]() , то абсолютные значения множителей
, то абсолютные значения множителей ![]() малы.
малы.
Этим объясняется то обстоятельство, что влияние форм прогибов, соответствующих критическим скоростям, значительно превышающим рабочую скорость вращения, невелико. Кроме того, при технически возможных формах распределения неуравновешенности коэффициенты ![]() имеют тенденцию к уменьшению с ростом
имеют тенденцию к уменьшению с ростом ![]() . Поэтому при уравновешивании роторов приходится иметь дело с устранением динамического прогиба на всех доступных критических скоростях, а также с составляющими, связанными с одной или двумя критическими скоростями, превышающими номинальную скорость вращения.
. Поэтому при уравновешивании роторов приходится иметь дело с устранением динамического прогиба на всех доступных критических скоростях, а также с составляющими, связанными с одной или двумя критическими скоростями, превышающими номинальную скорость вращения.
Все описанные выше явления сопровождались теоретическими выводами и рассмотрением примеров применительно к двухопорному ротору на податливых опорах. Это было сделано для простоты изложения, но по существу не является ограничением метода.
Нахождение критических скоростей и форм свободных изгибных колебаний ротора, равно как и определение реальных значений податливостей его опор, требует проведения сложных расчетов, а также тонких и трудоемких экспериментов. Однако в ряде случаев такие данные отсутствуют и приходится искать способы приближенного решения задачи. Одним из таких приближений может служить использование в качестве расчетной схемы ротора постоянного сечения на жестких опорах. Главным достоинством такой схемы является то, что как формы свободных колебаний, так и формы неуравновешенности оказываются синусоидами. При этом выражения (10) и (6) приобретают простую форму
 ;
;![]() .
.
Следует отметить, что использование синусоидальных форм колебаний и форм неуравновешенности во многих практических случаях приводит к вполне удовлетворительным результатам.
Под действием центробежных сил первичной неуравновешенности вращающийся ротор приобретает динамический прогиб, а его подшипники - вибрацию с частотой вращения (так называемой оборотной частотой). Величина и конфигурация прогиба, равно как и амплитуды и фазы колебаний подшипников, определяются величиной и характером распределения неуравновешенности по длине ротора, близостью скорости вращения к той или иной критической скорости и величиной демпфирования колебательного движения.
Динамический прогиб ротора на произвольном расстоянии ![]() от опоры и при произвольной скорости вращения
от опоры и при произвольной скорости вращения ![]() (без учета демпфирования) может быть записан в виде ряда
(без учета демпфирования) может быть записан в виде ряда
 , (11)
, (11)
где ![]() - критические скорости вращения ротора;
- критические скорости вращения ротора;
 .
.
Функции ![]() называются формами свободных изгибных колебаний ротора и, как правило, определяются расчетным путем. Для ротора постоянного сечения
называются формами свободных изгибных колебаний ротора и, как правило, определяются расчетным путем. Для ротора постоянного сечения
![]() ,
,
где ![]() - длина ротора.
- длина ротора.
Величины ![]() называются коэффициентами форм колебаний.
называются коэффициентами форм колебаний.
Распределение неуравновешенности вдоль оси ротора характеризуется выражением
![]() . (12)
. (12)
Выражение (12) можно записать в комплексной форме
![]() .
.
Эта формула описывает так называемую кривую начальных эксцентрицитетов, на которой лежат центры тяжести последовательных сечений неуравновешенного ротора.
Кривая динамического прогиба и кривая эксцентрицитетов в общем случае являются пространственными кривыми и, как это видно из выражений (11) и (12), могут быть представлены в виде бесконечной суммы плоских кривых.
Формой неуравновешенности называется плоская кривая, полученная путем умножения ординат ![]() форм свободных изгибных колебаний на ординаты
форм свободных изгибных колебаний на ординаты ![]() кривой распределения массы ротора по его длине.
кривой распределения массы ротора по его длине.
В свою очередь коэффициенты ![]() , определяющие величину и угловое положение
, определяющие величину и угловое положение ![]() -х составляющих эксцентрицитета, разложенного по формам колебаний, называются коэффициентами форм неуравновешенности и имеют следующее выражение.
-х составляющих эксцентрицитета, разложенного по формам колебаний, называются коэффициентами форм неуравновешенности и имеют следующее выражение.
Здесь ![]() - амплитуды форм неуравновешенности,
- амплитуды форм неуравновешенности,
![]() - углы между плоскостями
- углы между плоскостями ![]() -x форм неуравновешенности и некоторой фиксированной плоскостью ротора.
-x форм неуравновешенности и некоторой фиксированной плоскостью ротора.
Балансировочные грузы, установленные вдоль ротора строго по какой-либо одной форме неуравновешенности, вызывают динамический прогиб ротора только по соответствующей форме свободных колебаний, не оказывая никакого влияния на прогиб по другим формам (условие ортогональности форм колебаний).
Для ротора постоянного сечения выражение (12) будет иметь вид:
![]() .
.
Разложение кривой эксцентрицитетов для ротора постоянного сечения, неуравновешенные массы которого вызывают прогиб по первым двум формам колебаний и лежат в различных плоскостях ![]() , показано на рис.4.
, показано на рис.4.
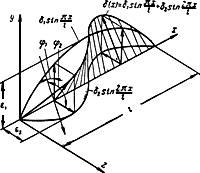
Рис.4. Разложение кривой эксцентрицитетов по первым двум синусоидальным
формам неуравновешенности ![]()
В практике балансировки подавляющее большинство роторов генераторов обладает симметрией. При этом нечетные (первая, третья и т.д.) формы колебаний и формы неуравновешенности называются симметричными, а четные (вторая, четвертая и т.д.) - кососимметричными. В дальнейшем эти термины будут использоваться без специальных пояснений.
При соблюдении условия
![]() 0(
0(![]() 1, 2, 3, ...),
1, 2, 3, ...),
т.е. при равенстве нулю всех коэффициентов форм неуравновешенности, прогиб реального, обладающего демпфированием ротора, так же как и вибрация подшипников, обращается в нуль на любой скорости вращения. С другой стороны, как видно из формулы (11), преобладающее влияние на прогиб какого-либо из коэффициентов ![]() наступает при совпадении
наступает при совпадении ![]() с
с ![]() , т.е. на соответствующей ему по номеру критической скорости. Так, на первой критической скорости
, т.е. на соответствующей ему по номеру критической скорости. Так, на первой критической скорости ![]() динамический прогиб ротора приобретает максимум, ограниченный демпфированием, и возбуждается преимущественно небалансом, распределенным по первой форме неуравновешенности. При этом динамический прогиб ротора имеет форму близкую к первой форме свободных изгибных колебаний.
динамический прогиб ротора приобретает максимум, ограниченный демпфированием, и возбуждается преимущественно небалансом, распределенным по первой форме неуравновешенности. При этом динамический прогиб ротора имеет форму близкую к первой форме свободных изгибных колебаний.
Для ротора постоянного сечения на жестких опорах формы динамического прогиба и неуравновешенности будут иметь вид, близкий к полупериоду синусоиды (рис.5, ![]() ).
).
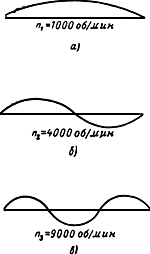
Рис.5. Резонансные формы динамического прогиба ротора постоянного сечения на жестких опорах
Соответственно на второй критической скорости ![]() прогиб возбуждается главным образом небалансом, распределенным по второй форме неуравновешенности и имеет форму, близкую ко второй форме свободных изгибных колебаний (для ротора постоянного сечения это соответствует полному периоду синусоиды, как показано на рис.5, б) и т.д.
прогиб возбуждается главным образом небалансом, распределенным по второй форме неуравновешенности и имеет форму, близкую ко второй форме свободных изгибных колебаний (для ротора постоянного сечения это соответствует полному периоду синусоиды, как показано на рис.5, б) и т.д.
Таким образом, при критических скоростях вращения, т.е. на резонансах, динамический прогиб ротора увеличивается, а его форма приближается к соответствующей форме свободных изгибных колебаний.
Развитию резонанса благоприятствует небаланс, распределенный по форме, соответствующей данной критической скорости. Следует отметить, что, как правило, небольшое отклонение формы динамического прогиба от формы свободных колебаний при прохождении критической скорости определяется главным образом составляющими небаланса, распределенного по смежным формам неуравновешенности. Если это не имеет места, то форма динамического прогиба и форма свободных колебаний практически совпадают.
В общем случае форма прогиба будет иметь вид пространственной кривой. Вращаясь с постоянной скоростью, ротор сохраняет постоянную форму динамического прогиба. При этом амплитуды и фазы вибраций подшипников также не меняются.
В докритической области ![]() направление эксцентрицитета
направление эксцентрицитета ![]() и вызванного им динамического прогиба близки друг к другу. По мере приближения к критической скорости угол между ними увеличивается, достигая 90° при
и вызванного им динамического прогиба близки друг к другу. По мере приближения к критической скорости угол между ними увеличивается, достигая 90° при ![]() . В закритической области угол увеличивается, приближаясь к 180° при
. В закритической области угол увеличивается, приближаясь к 180° при ![]() . Скорость изменения этого угла максимальна при прохождении критической скорости.
. Скорость изменения этого угла максимальна при прохождении критической скорости.
Сказанное иллюстрируется скоростными характеристиками, приведенными в гл.II.
Формы свободных изгибных колебаний реального ротора, имеющего переменное по длине сечение, могут значительно отличаться от синусоидальных. Несимметрия системы ротор-опоры, определяемая несимметрией ротора или различием в податливостях опор, приводят к тому, что как формы колебаний, так и формы неуравновешенности становятся несимметричными. На рис.6 изображены первые три формы свободных изгибных колебаний ротора турбогенератора ТВВ-165-2 на жестких, равно- и разноупругих опорах. Рядом с каждой из форм указана соответствующая ей критическая скорость.
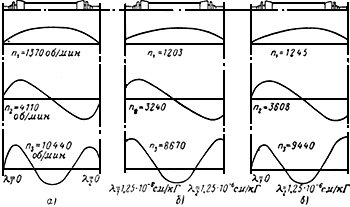
Рис.6. Формы свободных изгибных колебаний ротора турбогенератора ТВВ-165 на жестких ![]() ,
,
равноупругих (б) и разноупругих (в) опорах
Реальные роторы имеют ступенчато изменяющееся сечение. Формы неуравновешенности таких роторов имеют также ступенчатый характер. Сравнение форм колебаний и форм неуравновешенности для ротора турбогенератора ТВФ-200-2 приводится на рис.7.
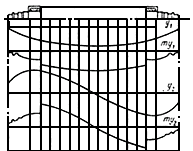
Рис.7. Формы свободных изгибных колебаний и неуравновешенности ротора турбогенератора ТВФ-200-2
На первый взгляд такое усложнение формы неуравновешенности практически исключает возможность использования модели ротора постоянного сечения в качестве приближенной схемы для проведения балансировки. Однако, учитывая то обстоятельство, что грузы, например при балансировке на электростанции, могут устанавливаться лишь в ограниченном числе плоскостей, примыкающих к бочке ротора (центрирующие кольца и вентиляторы), т.е. той части, где его сечение изменяется незначительно, это различие становится не столь существенным и использование синусоидальных форм колебаний неуравновешенности оказывается в ряде случаев вполне оправданным.
Для ротора постоянного сечения на жестких опорах величины последовательных критических скоростей пропорциональны квадратам их порядковых номеров (рис.5). У реальных роторов на податливых опорах это соотношение меняется так, что критические скорости сближаются (рис.6). Таким образом, податливость опор не только изменяет резонансные формы прогиба ротора, но также снижает критические скорости системы ротор-опоры. Особенно существенно снижаются критические скорости, начиная со второй и выше. Это иллюстрируется сравнением значений ![]() ,
, ![]() и
и ![]() , представленных на рис.6 и полученных при расчете критических скоростей одного и того же ротора на жестких и податливых опорах.
, представленных на рис.6 и полученных при расчете критических скоростей одного и того же ротора на жестких и податливых опорах.
Для современного турбогенератора вторая критическая скорость ротора на эксплуатационном фундаменте может в 1,3-1,6 раза быть ниже расчетной для ротора на жестких опорах.
Критические скорости, формы колебаний и другие механические характеристики роторов некоторых типов отечественных турбогенераторов приведены в приложении 1.
Формы свободных изгибных колебаний ротора, имеющего консольный участок, обладают некоторыми особенностями.
На рис.8 изображены формы колебаний ротора с консолью, полученные расчетным путем (турбогенератор ТВВ-320-2, жесткие опоры). На первой критической скорости ротора консольный участок почти не имеет собственного динамического прогиба и является как бы жестким продолжением упругой линии ротора. Относительный прогиб консоли, равный отношению прогиба ![]() конца консольного участка к прогибу
конца консольного участка к прогибу ![]() ротора, при этом составляет 0,71.
ротора, при этом составляет 0,71.
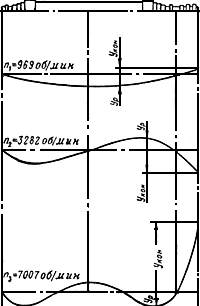
Рис.8. Формы свободных изгибных колебаний ротора турбогенератора ТВВ-320-2 на жестких опорах
На второй критической скорости относительный прогиб консоли увеличивается до 1,25. Это вызвано как увеличением угла наклона вала в подшипнике, что характерно для перевода к более высоким формам прогиба ротора, так и появлением небольшого динамического прогиба собственно консоли.
Динамический прогиб консольного участка ротора значительно возрастает на третьей критической скорости, где относительный прогиб достигает значения 6,7. Столь большое усиление вибраций консоли связано как с увеличением угла наклона, так и главным образом с приближением к собственной критической скорости консольного участка, которая в описываемом примере наступает при 9370 об/мин и характеризуется наибольшим динамическим прогибом этой зоны ротора.
Для роторов на податливых опорах с консольным участком качественная картина колебаний сохраняется, но критическая скорость консольного участка (как и критические скорости роторов) существенно снижается. Для ротора турбогенератора ТВВ-320-2 на эксплуатационных подшипниках критическая скорость консольного участка (по данным завода "Электросила") составляет 5640 об/мин. При этом относительный прогиб консоли достигает 18,2, что превышает относительный прогиб консоли на второй критической скорости примерно в 40 раз.
Тем не менее влияние небаланса, расположенного в зоне контактных колец, может вызвать уже при 3000 об/мин весьма значительную их вибрацию. Для турбогенераторов других типов (или при снижении жесткости фундамента), а также для различных энергетических машин (электродвигатели, насосы, турбокомпрессоры и др.) не исключена вероятность работы в непосредственной близости от этой критической скорости. В подобном случае на вибрацию консоли будет оказывать решающее влияние ее собственная неуравновешенность.
Таким образом, у роторов современных крупных турбогенераторов, работающих вблизи второй или между второй и третьей критическими скоростями, значительные колебания консольного участка на рабочей скорости вращения могут возбуждаться:
а) неуравновешенностью ротора, вызывающей его прогиб главным образом по высшим (вторая, третья) формам колебаний;
б) неуравновешенностью консольного участка.
Развитию колебаний консоли способствуют:
а) близость рабочей скорости вращения к одной из высших критических скоростей системы ротор-опоры;
б) близость рабочей скорости вращения к критической скорости консольного участка.
2. МЕТОДЫ УРАВНОВЕШИВАНИЯ РОТОРОВ
Целью динамической балансировки является устранение повышенной вибрации опор и снижение динамического прогиба ротора во всем диапазоне скоростей от нуля до номинальной скорости вращения, включая критические скорости, и во всем диапазоне нагрузок турбоагрегата.
В противном случае для гибкого ротора может иметь место опасное возрастание вибрации при прохождении критических скоростей в процессе разгона и выбега турбоагрегата. Возникающие при этом значительные динамические прогибы вала нарушают нормальную работу уплотнений, токосъемных устройств, муфт и т.п.
С другой стороны, полное устранение небаланса ротора не всегда является необходимым, поскольку даже при сравнительно высоких уровнях неуравновешенности, если они связаны только с высшими формами колебаний, динамический прогиб ротора и вибрация подшипников во всем диапазоне доступных скоростей вращения могут оказаться пренебрежимо малыми.
Балансировка осуществляется путем размещения на роторе, вдоль оси вращения, уравновешивающих грузов с погонной массой ![]() на радиусах
на радиусах ![]() . Грузы устанавливаются таким образом, чтобы для каждой
. Грузы устанавливаются таким образом, чтобы для каждой ![]() -й формы свободных изгибных колебаний, на которые раскладывается динамический прогиб ротора, выполнялось условие
-й формы свободных изгибных колебаний, на которые раскладывается динамический прогиб ротора, выполнялось условие
![]() . (13)
. (13)
Тогда при установке ![]() -й системы грузов эксцентрицитет ротора изменится на величину
-й системы грузов эксцентрицитет ротора изменится на величину
![]() ,
,
и вследствие этого динамический прогиб получит приращение
![]() .
.
Если проделать эту операцию для ![]() 1, 2, ....,
1, 2, ...., ![]() , эксцентрицитет и динамический прогиб обратятся в нуль.
, эксцентрицитет и динамический прогиб обратятся в нуль.
Практически приходится ограничиться уравновешиванием лишь по ![]() формам колебаний до выполнения условия
формам колебаний до выполнения условия
![]() , (14)
, (14)
где ![]() - допустимое значение остаточного динамического прогиба.
- допустимое значение остаточного динамического прогиба.
Следует подчеркнуть, что если ротор на податливых опорах уравновешивается по ![]() формам колебаний, то это означает, что устраняется также
формам колебаний, то это означает, что устраняется также ![]() составляющих вибрации опор. Поэтому условие (14) может быть написано в виде
составляющих вибрации опор. Поэтому условие (14) может быть написано в виде
![]() , (15)
, (15)
где ![]() - допустимое значение остаточной вибрации опор.
- допустимое значение остаточной вибрации опор.
Таким образом, для проведения балансировки необходимо знать нормы вибрации подшипников (или допуски на остаточный динамический прогиб ротора), формы неуравновешенности ![]() , а также модули и аргументы коэффициентов
, а также модули и аргументы коэффициентов ![]() , т.е. составляющих эксцентрицитета, разложенного по формам свободных колебаний ротора.
, т.е. составляющих эксцентрицитета, разложенного по формам свободных колебаний ротора.
Формы неуравновешенности определяются расчетным путем или экспериментально. Коэффициенты ![]() , а следовательно, величина и расположение систем уравновешивающих грузов находятся в процессе балансировки ротора.
, а следовательно, величина и расположение систем уравновешивающих грузов находятся в процессе балансировки ротора.
Исходя из общего условия (13), предложены следующие методы балансировки.
1. На некоторой скорости, не совпадающей с критической, вдоль длины ротора во многих точках измеряется динамический прогиб. По данным измерений строится кривая прогиба ![]() , которая раскладывается в ряд по формам свободных колебаний
, которая раскладывается в ряд по формам свободных колебаний
![]() . (16)
. (16)
Поскольку прогиб ротора описывается, как правило, пространственной кривой, для разложения используются ее проекции на координатные плоскости.
Коэффициенты ряда (16), каждый из которых соответствует какой-либо одной ![]() -й форме колебаний, находятся по формуле
-й форме колебаний, находятся по формуле
 . (17)
. (17)
Для ротора постоянного сечения (![]() const), имеющего синусоидальные формы свободных колебаний, это эквивалентно вычислению коэффициентов ряда Фурье
const), имеющего синусоидальные формы свободных колебаний, это эквивалентно вычислению коэффициентов ряда Фурье
 .
.
Далее на ротор устанавливается система пробных грузов, распределенная вдоль оси вращения строго по какой-либо одной ![]() -й форме неуравновешенности
-й форме неуравновешенности
![]() , (18)
, (18)
где ![]() - эксцентрицитет, создаваемый пробными грузами.
- эксцентрицитет, создаваемый пробными грузами.
Коэффициент разложения эксцентрицитета по ![]() -й форме колебаний находится из уравнения (18)
-й форме колебаний находится из уравнения (18)
![]() . (19)
. (19)
Здесь числитель задан установкой пробных грузов, а знаменатель - ![]() -я форма неуравновешенности - предполагается известным.
-я форма неуравновешенности - предполагается известным.
На ранее выбранной скорости вращения измеряется новое значение динамического прогиба ротора ![]() . Определяется приращение прогиба, вызванное установкой
. Определяется приращение прогиба, вызванное установкой ![]() -й системы пробных грузов
-й системы пробных грузов
![]() .
.
Это приращение прогиба раскладывается в ряд по формам свободных колебаний
![]() ,
,
где ![]() -й коэффициент ряда вычисляется аналогично предыдущему из выражения
-й коэффициент ряда вычисляется аналогично предыдущему из выражения
 . (20)
. (20)
Теперь, из уравнения (7) определяется ![]() -я составляющая начального эксцентрицитета ротора
-я составляющая начального эксцентрицитета ротора
![]() .
.
Отсюда, используя выражения (19) и (20), находим систему грузов, устраняющую ![]() -ю составляющую динамического прогиба ротора, т.е. уравновешивающую вал по
-ю составляющую динамического прогиба ротора, т.е. уравновешивающую вал по ![]() -й форме свободных колебаний,
-й форме свободных колебаний,
![]() . (21)
. (21)
Действуя подобным образом, можно последовательно устранить все составляющие динамического прогиба, т.е. довести прогиб ротора до нуля.
Выражение (21) представляет собой общее решение задачи уравновешивания ротора по формам свободных изгибных колебаний. В соответствии с ним ![]() -я система уравновешивающих грузов находится в результате умножения
-я система уравновешивающих грузов находится в результате умножения ![]() -й системы пробных грузов на отношение векторов вибрации
-й системы пробных грузов на отношение векторов вибрации ![]() -й формы, измеренной до и после установки пробных грузов.
-й формы, измеренной до и после установки пробных грузов.
Описанный метод балансировки обеспечивает полное уравновешивание ротора, независимо от начального распределения небаланса. Однако практическое применение метода весьма затрудняется необходимостью измерений колебаний ротора по всей его длине.
Поскольку балансировка производится на некритической скорости, чувствительность системы ротор-опоры к грузам, распределенным по формам неуравновешенности (особенно высшим), будет мала. Это требует высокой точности как инструментального измерения колебаний ротора, так и численного выделения коэффициентов разложения динамического прогиба по формам колебаний.
2. Уравновешивание ротора по ограниченному и наперед заданному числу ![]() форм свободных колебаний можно осуществить более быстро следующим методом.
форм свободных колебаний можно осуществить более быстро следующим методом.
При пробном пуске на роторе помещается система грузов, возбуждающих прогиб, равный сумме прогибов по ![]() заданным формам колебаний. Этого можно добиться, установив на роторе одновременно
заданным формам колебаний. Этого можно добиться, установив на роторе одновременно ![]() систем грузов, каждая из которых вызывает одну из форм колебаний, находящихся в промежутке 1, 2, ...,
систем грузов, каждая из которых вызывает одну из форм колебаний, находящихся в промежутке 1, 2, ..., ![]() .
.
Измеряя динамический прогиб ротора до и после установки пробных грузов и раскладывая первоначальный прогиб и его разность по ![]() формам, можно определить коэффициенты разложения прогиба
формам, можно определить коэффициенты разложения прогиба ![]() и
и ![]() по методу, описанному выше.
по методу, описанному выше.
Далее находим ![]() составляющих начального эксцентрицитета
составляющих начального эксцентрицитета
![]() (
(![]() 1, 2, ...,
1, 2, ..., ![]() ).
).
Установив одновременно ![]() систем грузов, каждая из которых уравновешивает ротор по одной из форм колебаний
систем грузов, каждая из которых уравновешивает ротор по одной из форм колебаний
![]() (
(![]() 1, 2, ...,
1, 2, ..., ![]() ),
),
можно снизить динамический прогиб до нужной величины.
Применение второго метода балансировки в полном его объеме связано с теми же трудностями, что и применение первого. Однако установка на роторе систем грузов, возбуждающих одновременно несколько заданных форм колебаний, используется в практическом методе балансировки, описанном ниже.
3. Третий метод заключается в уравновешивании ротора по ограниченному числу форм колебаний путем балансировки на критических и рабочей скоростях вращения.
Пусть в диапазоне от нуля и до рабочей скорости вращения лежат ![]() критических скоростей ротора. Если первоначальный небаланс включает
критических скоростей ротора. Если первоначальный небаланс включает ![]() составляющих форм неуравновешенности, то на каждой
составляющих форм неуравновешенности, то на каждой ![]() -й критической скорости в диапазоне
-й критической скорости в диапазоне ![]() 1, 2, ...,
1, 2, ..., ![]() возбудятся резонансные колебания системы ротор-опоры.
возбудятся резонансные колебания системы ротор-опоры.
На резонансе знаменатель ![]() -го члена разложения динамического прогиба по формам колебаний достигнет минимума и будет иметь место соотношение
-го члена разложения динамического прогиба по формам колебаний достигнет минимума и будет иметь место соотношение
![]()
![]()
![]() 1, 2, ...,
1, 2, ..., ![]() .
.
При этом, как указывалось выше, форма прогиба по длине ротора практически будет совпадать с ![]() -й формой свободных колебаний. Таким образом, выполняется приближенное равенство.
-й формой свободных колебаний. Таким образом, выполняется приближенное равенство.
![]() . (22)
. (22)
Размещение на роторе системы пробных грузов, распределенных по ![]() -й форме неуравновешенности, вызовет приращение прогиба
-й форме неуравновешенности, вызовет приращение прогиба
![]() .
.
Тогда из уравнения (7) ![]() -й коэффициент разложения начального эксцентрицитета по формам колебаний
-й коэффициент разложения начального эксцентрицитета по формам колебаний
![]() .
.
Отсюда определится ![]() -я система уравновешивающих грузов
-я система уравновешивающих грузов
![]() . (23)
. (23)
Следовательно, измеряя вибрацию при пусках без пробных грузов и с грузами на каждой ![]() -й критической скорости, лежащей ниже рабочей, можно последовательно отбалансаровать ротор, устранив
-й критической скорости, лежащей ниже рабочей, можно последовательно отбалансаровать ротор, устранив ![]() форм колебаний.
форм колебаний.
Устранения ![]() -й формы удается добиться, используя в качестве балансировочной рабочую скорость вращения.
-й формы удается добиться, используя в качестве балансировочной рабочую скорость вращения.
Так как из выражений (22) и (23)
![]() ,
,
то для нахождения уравновешивающей системы грузов достаточно при первом и втором пусках измерить динамический прогиб лишь в одном сечении вала, если только это сечение не совпадает с узлом ![]() -й формы колебаний.
-й формы колебаний.
Этому условию для двухопорного ротора соответствуют участки, прилегающие к опорам, или сами опоры, что упрощает измерение вибрации при балансировке.
В условиях электростанции, когда турбогенератор находится в собранном виде, установка грузов практически возможна лишь в две плоскости, расположенные по концам бочки ротора.
Таким образом, создаются очевидные ограничения для применения третьего метода балансировки в чистом виде. Однако, используя условие (22), можно ставить пробные грузы в две плоскости так, чтобы возбуждалась нужная форма колебаний, а уравновешивающие грузы распределять по ротору в соответствии с условием (23).
Во многих же случаях, когда система грузов, установленная в две плоскости, не вызывает заметного прогиба ротора одновременно по нескольким уравновешиваемым формам, можно добиться снижения вибрации, производя балансировку помещением грузов в две плоскости. Подобная балансировка возможна, например, для ротора, работающего между первой и второй критическими скоростями, когда система грузов, помещенная в две плоскости, устраняет прогиб по второй форме, не вызывая заметного прогиба по первой и третьей формам.
Анализ рассмотренных методов балансировки показывает, что первый из них является универсальным и позволяет устранить любое число членов разложения динамического прогиба ![]() и эксцентрицитета
и эксцентрицитета ![]() , тогда как для двух других это число ограничено. Первые два метода позволяют проводить уравновешивание почти на всех доступных скоростях вращения, а в третьем для этого используются зоны критических скоростей и точность установления скорости заметно влияет на результаты измерений.
, тогда как для двух других это число ограничено. Первые два метода позволяют проводить уравновешивание почти на всех доступных скоростях вращения, а в третьем для этого используются зоны критических скоростей и точность установления скорости заметно влияет на результаты измерений.
Однако как первый, так и второй методы связаны со сложными измерениями динамического прогиба вдоль всей длины вращающегося ротора. Практически это осуществимо только в условиях заводов - изготовителей машин при наличии специальных балансировочных и измерительных устройств. Возможность проведения подобных измерений должна быть также предусмотрена конструкцией ротора.
При проведении балансировки по третьему методу, подробно рассматриваемому в Руководящих указаниях, можно ограничиться измерением вибрации подшипников (концов вала). Трудоемкость измерений и расчетов при этом значительно снижается.
Возможно сочетание второго и третьего методов балансировки. При этом на ротор одновременно устанавливается несколько систем пробных грузов, а измерения колебаний производятся на критических и рабочей скоростях в двух точках по длине ротора.
Этот метод в последнее время получил широкое распространение на заводе "Электросила", а также начал внедряться в практику эксплуатационной балансировки. Главное его преимущество состоит в сокращении времени, затрачиваемого на балансировку, за счет уменьшения числа пробных пусков.
Рекомендуемый метод балансировки роторов основывается на выделении из динамического прогиба неуравновешенного ротора составляющих, имеющих форму свободных изгибных колебаний, и последовательного их устранения. При этом выделяются и устраняются соответствующие составляющие вибрации опор ротора.
В основе метода лежит то обстоятельство, что грузы установленные по какой-либо одной форме неуравновешенности, вызывают прогиб ротора только по одной форме колебаний и не оказывают влияния на прогиб по другим формам (условие ортогональности).
Вторым обстоятельством, используемым при балансировке, является то, что максимальная чувствительность системы ротор-опоры к грузам, распределенным по определенной форме неуравновешенности, имеет место на критической скорости, соответствующей этой форме неуравновешенности.
Для роторов, работающих до первой, между первой и второй и вблизи второй критической скорости, достаточно устранить составляющие динамического прогиба по первым трем формам колебаний, т.е. привести к нулю коэффициенты ![]() ,
, ![]() ,
, ![]() выражения (11).
выражения (11).
Этого можно добиться путем установки на ротор систем грузов, приводящих к нулю соответствующие коэффициенты ![]() ,
, ![]() и
и ![]() форм неуравновешенности.
форм неуравновешенности.
Если при балансировке ограничиться устранением первых трех форм колебаний, можно с достаточной для практики точностью выполнить условие ортогональности, используя специально подобранные системы сосредоточенных грузов. В ряде случаев можно также вместо реальных форм неуравновешенности использовать их синусоидальные приближения.
Уравновешивание ротора в условиях эксплуатации достигается путем установки систем симметричных и кососимметричных грузов.
Системой симметричных грузов называются два равных груза, установленных на одинаковом расстоянии от оси вращения ротора и на одном и том же радиальном направлении, приложенных в двух плоскостях, равноудаленных от опор ротора (рис.9, ![]() ).
).
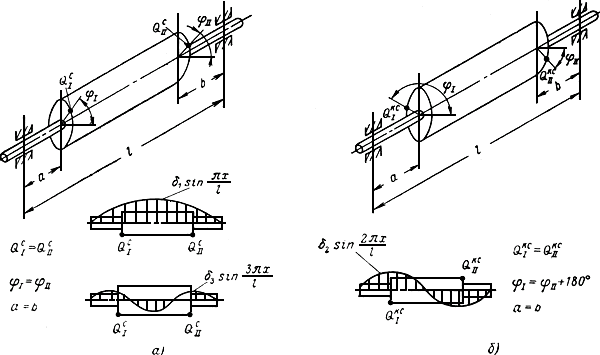
Рис.9. Расположение на роторе симметричных ![]() и кососимметричных (б) уравновешивающих грузов
и кососимметричных (б) уравновешивающих грузов
Системой кососимметричных грузов называются два равных груза, установленных на одинаковом расстоянии от оси вращения, но на разных радиальных направлениях. Эти грузы также приложены в двух равноудаленных от опор ротора плоскостях (рис.9, б).
Неуравновешенность симметричных форм компенсируется симметричными грузами, а кососимметричных форм - соответственно кососимметричными грузами.
Плоскости вдоль оси ротора, в которых конструктивно предусмотрена установка уравновешивающих грузов в специальные пазы или отверстия, называются балансировочными плоскостями. У собранных турбогенераторов ими обычно являются плоскости обоих центрирующих колец или вентиляторов, а для некоторых типов машин - также специальная плоскость на консольном участке со стороны контактных колец.
В заводских условиях при балансировке ротора вне статора уравновешивающие грузы устанавливаются также на бочке ротора.
Используя для балансировки систему симметричных или кососимметричных грузов, следует иметь в виду, что каждая из этих систем, компенсируя какую-либо одну форму начальной неуравновешенности, вносит неуравновешенность других форм. Так, устраняя первую форму неуравновешенности, симметричные грузы создают неуравновешенность третьей, пятой и так далее форм. Опыт показывает, что в этом случае практическое влияние оказывает только вносимая третья форма неуравновешенности. Однако, если грузы создают заметный эксцентрицитет ![]() , то ротор, отбалансированный на первой критической скорости, может иметь значительный динамический прогиб и повышенную вибрацию подшипников на рабочей скорости вращения, если эта скорость существенно превышает первую критическую.
, то ротор, отбалансированный на первой критической скорости, может иметь значительный динамический прогиб и повышенную вибрацию подшипников на рабочей скорости вращения, если эта скорость существенно превышает первую критическую.
Это нежелательное явление устраняется, если балансировочные грузы располагать вдоль всего ротора, по формам неуравновешенности.
Однако даже при заводской балансировке размещение грузов по формам неуравновешенности не всегда возможно с достаточной для практики точностью. Это связано главным образом с ограниченной возможностью размещения балансировочных грузов вне зоны бочки ротора. Кроме того, не для всех роторов известны формы неуравновешенности из-за отсутствия данных о формах колебаний на реальных опорах.
Поэтому в заводской практике используются системы симметричных, кососимметричных, а также распределенных грузов, которые помещаются на роторе в наиболее близком соответствии с первыми тремя формами неуравновешенности или их синусоидальными приближениями (рис.10).
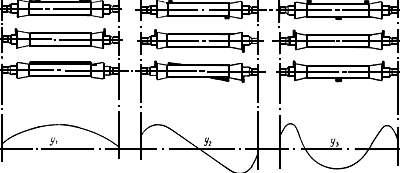
Рис.10. Системы грузов, используемые при балансировке в заводских условиях
Компенсируя небаланс, связанный с первыми тремя синусоидальными формами, можно добиться удовлетворительного снижения вибрации как для симметричной, так и для несимметричной системы ротор-опоры.
При этом влияние высших форм неуравновешенности, вносимых балансировочными грузами, сводится к допустимому минимуму.
При балансировке турбогенератора в условиях эксплуатации устранение влияния высших форм неуравновешенности, вносимых грузами, достигается путем замены этих грузов, установленных в балансировочные плоскости, системой грузов, распределенных вдоль оси ротора. Методика переноса грузов рассматривается ниже.
Величина и угловое расположение балансировочных грузов определяются на основании измерений амплитуды и фазы вибрации подшипников (концов вала) балансируемого ротора.
Балансировочные расчеты производятся по результатам измерений вибрации, возбуждаемой как первоначальной неуравновешенностью ротора, так и суммой неуравновешенности с различными системами пробных грузов.
Вибрация измеряется на рабочей скорости вращения, а также на критических скоростях или вблизи них, так как чувствительность системы ротор-опоры к отдельным формам неуравновешенности максимальна на критических скоростях.
Скорость вращения, на которой производится уравновешивание ротора, называется балансировочной.
При расчетах принимается прямая пропорциональность между относительным изменением амплитуд вибрации подшипников (концов вала) и изменением сил, вызывающих эту вибрацию.
Принимается также, что угол между направлением действия неуравновешенности и направлением вызванной ею вибрации сохраняется постоянным при фиксированной скорости вращения (условия линейности системы ротор-опоры).
Из векторов начальной вибрации ![]() и
и ![]() обоих подшипников (концов вала) можно выделить симметричную и кососимметричную составляющие (рис.11,
обоих подшипников (концов вала) можно выделить симметричную и кососимметричную составляющие (рис.11, ![]() )
)
![]() ;
; ![]() .
.
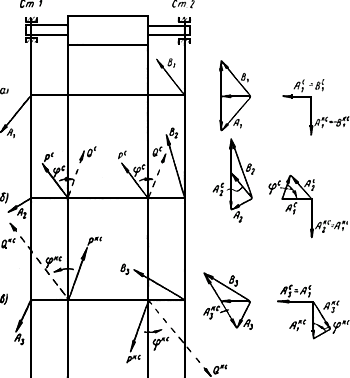
Рис.11. Влияние на вибрацию симметричных и кососимметричных грузов:![]() - пуск без грузов; б - пуск с симметричными грузами; в - пуск с кососимметричными грузами;
- пуск без грузов; б - пуск с симметричными грузами; в - пуск с кососимметричными грузами;
Ст.1 - сторона турбины; Ст.2 - сторона возбудителя
Для симметричного по длине ротора на равножестких опорах симметричная система грузов создает одинаковые и синфазные приращения вибрации на опорах, а кососимметричная система создает тоже одинаковые, но противофазные приращения вибрации (рис.11, б и в). Таким образом, приращение вибрации от симметричной системы грузов однозначно определяется приращением полусумм векторов вибрации ![]() и соответственно от кососимметричной системы приращением полуразностей векторов вибрации
и соответственно от кососимметричной системы приращением полуразностей векторов вибрации ![]() .
.
Если при постановке пробных грузов взять отношение вектора приращения вибрации ![]() к вектору пробного груза
к вектору пробного груза ![]() , то можно найти так называемую балансировочную чувствительность системы ротор-опоры
, то можно найти так называемую балансировочную чувствительность системы ротор-опоры
![]() . (24)
. (24)
Балансировочная чувствительность является вектором, величина которого имеет размерность мк/кг. Фаза вектора чувствительности равна углу между направлением действия грузов и направлением возбуждаемой ими вибрации с учетом фазового сдвига, вносимого виброизмерительной аппаратурой.
Различается балансировочная чувствительность к системам симметричных, кососимметричных, а также распределенных грузов, используемых для уравновешивания ротора.
Значения балансировочной чувствительности зависят от расположения балансировочных плоскостей и конструкции ротора, способов его соединения со смежными роторами, жесткости опор и фундамента.
Балансировочная чувствительность является функцией скорости вращения ротора. Некоторый разброс чувствительности для одной и той же машины при фиксированной скорости вращения может быть вызван отклонением системы ротор-опоры от линейности.
Средние значения балансировочных чувствительностей отечественных турбогенераторов приведены в приложении 2.
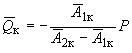
Разделив вектор исходной вибрации на балансировочную чувствительность к соответствующей системе грузов, взятую с обратным знаком, получим вектор уравновешивающего груза. Окончательное выражение для определения веса и углового расположения уравновешивающих грузов имеют следующий вид:
![]() . (25)
. (25)
Вычисления по формуле удобно производить графоаналитически. Построения, необходимые для определения ![]() и
и ![]() , а также углов поворота векторов
, а также углов поворота векторов ![]() и
и ![]() , представлены на рис.11.
, представлены на рис.11.
В случае заметного отклонения системы ротор-опоры от линейности последовательно производится несколько балансировочных циклов (как правило, не более двух по описанному ниже методу).
В случае, когда известно взаимное влияние различных систем грузов на вибрацию, можно ставить на ротор сразу две (симметричную и кососимметричную) системы пробных грузов. При этом, выделяя полусуммы и полуразности векторов вибрации, удается найти балансировочную чувствительность одновременно для обеих систем грузов. Заключительным этапом балансировки является установка на роторе одновременно симметричной и кососимметричной систем уравновешивающих грузов.
Такой метод балансировки требует высокой квалификации балансировщика, и его следует применять с осторожностью.
При несимметрии системы ротор-опоры, т.е. для ротора переменного сечения на разноподатливых опорах, пробные системы грузов возбуждают вибрацию подшипников (концов вала), неодинаковую по амплитуде, а также не строго синфазную или противофазную.
Обычно это не является препятствием для проведения балансировки с достаточной точностью по приведенной выше методике с выделением синфазных и противофазных составляющих вибрации.
Однако, если симметричные (кососимметричные) грузы возбуждают значительную противофазную, (синфазную) вибрацию, что свидетельствует о большой несимметрии системы, при балансировочных расчетах следует использовать коэффициенты неравножесткости
![]() ;
; ![]() .
.
Умножив на ![]() вибрацию, измеренную на одном из подшипников (концов вала), можно обращаться с системой ротор-опоры как с симметричной.
вибрацию, измеренную на одном из подшипников (концов вала), можно обращаться с системой ротор-опоры как с симметричной.
Для определения коэффициентов неравножесткости используются обычные балансировочные пуски с пробными грузами.
При выборе балансировочных скоростей следует остерегаться их совпадения или близости с так называемыми нечувствительными скоростями.
Нечувствительной скоростью ![]() называется скорость вращения ротора, на которой система симметричных или кососимметричных грузов, установленная в балансировочные плоскости, не возбуждает колебаний подшипников.
называется скорость вращения ротора, на которой система симметричных или кососимметричных грузов, установленная в балансировочные плоскости, не возбуждает колебаний подшипников.
Представление о нечувствительной скорости к симметричным грузам для ротора на равноупругих опорах дано на рис.12. Динамический прогиб ротора от симметричных грузов в диапазоне между первой и третьей критическими скоростями складывается преимущественно из прогибов по первой и третьей формам.
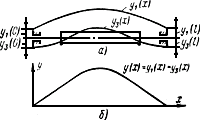
Рис.12. Прогиб ротора, возбуждаемый симметричными грузами на нечувствительной скорости
На нечувствительной скорости при помещении грузов в балансировочные плоскости эти прогибы на концах ротора будут равны и противоположны по направлению (рис.12, ![]() ). Следовательно, грузы не вызовут заметного изменения колебаний концов вала и вибрации подшипников.
). Следовательно, грузы не вызовут заметного изменения колебаний концов вала и вибрации подшипников.
В то же время при попытке устранить колебания концов ротора и его опор в области нечувствительной скорости путем установки больших по величине грузов в балансировочные пазы может возникнуть недопустимый динамический прогиб ротора (рис.12, б) и, как следствие, повреждение машины.
Кроме того, установка больших грузов может вызвать разрушение несущего грузы элемента ротора (колеса вентилятора, центрирующего или специально балансировочного кольца). Поэтому перед началом балансировки рекомендуется оценить значение нечувствительной скорости.
Нечувствительная скорость к кососимметричным грузам лежит для роторов турбогенераторов значительно выше рабочей скорости вращения. Нечувствительная же скорость к симметричным грузам обычно находится ниже рабочей скорости, а в некоторых случаях совпадает с ней. Для современных турбогенераторов нечувствительная скорость к системе симметричных грузов может быть приближенно определена по графику (рис.13) в зависимости от величины первой критической скорости ![]() ротора на жестких опорах и его размеров.
ротора на жестких опорах и его размеров.
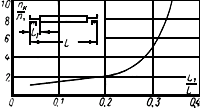
Рис.13. Зависимость нечувствительной скорости к симметричным грузам от ![]()
При балансировке роторов, у которых нечувствительная скорость близка к рабочей, система симметричных грузов помещается в плоскости, возможно более удаленные от балансировочных.
В результате правильно выполненной балансировки достигается не только устранение повышенной вибрации подшипников и снижение динамического прогиба ротора, но и уменьшение колебаний его консольных частей.
Однако в некоторых случаях, о которых cказано выше (в разделе 1), сохраняется повышенная вибрация его консоли и после уравновешивания ротора.
Теоретически полное уравновешивание консольного участка ротора может быть достигнуто путем установки системы грузов, один из которых устанавливается на консоли, а другие - в плоскостях между опорами. Однако на практике часто удается уравновесить консоль путем установки груза только на нее.
Груз, установленный на консоли, возбуждает максимальный динамический прогиб ротора (вибрацию подшипников) на его критических скоростях. Поэтому влияние груза на колебания консоли на этих скоростях значительно.
Вне области критических скоростей ротора груз возбуждает колебания консоли в основном за счет ее собственного динамического прогиба, не вызывая при этом значительного динамического прогиба самого ротора (вибрации подшипников).
На критической скорости собственно консольного участка груз существенно изменяет колебания консоли, почти не влияя на прогиб ротора и вибрацию его подшипников.
И, наконец, существует область скоростей вращения, на которых груз, установленный на консольном участке, вообще не возбуждает его колебания, т.е. не оказывает влияния на динамический прогиб консоли. Эти скорости вращения могут быть названы консольными нечувствительными скоростями в отличие от нечувствительных скоростей ротора. На нечувствительной скорости в процессе перехода от низшей критической скорости к высшей ротор изгибается таким образом, что угол наклона его консольной части относительно горизонтали становится равным нулю. При этом динамический прогиб консоли приближается к минимуму.
На нечувствительной скорости установка груза на консоли, не возбуждая ее колебаний, может существенно увеличить динамический прогиб ротора, что нежелательно. Поэтому перед началом балансировки следует попытаться оценить значение консольной нечувствительной скорости ![]() , что можно сделать при помощи графика, изображенного на рис.14.
, что можно сделать при помощи графика, изображенного на рис.14.
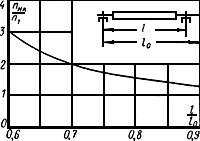
Рис.14. Зависимость консольной нечувствительной скорости к грузу,
установленному на конце консоли, от ![]()
Таким образом, при балансировке ротора грузом на консольном участке могут представляться три случая:
1. Устранение колебаний консоли не вызывает значительного изменения вибрации подшипников. Это преимущественно наблюдается при балансировке роторов генераторов, соединенных с роторами турбины (эксплуатационные условия).
2. При устранении колебаний консоли возникает заметное изменение вибрации подшипников. Подобный эффект наблюдается часто при уравновешивании отдельных роторов, т.е. при заводской балансировке.
3. Балансировочная скорость вращения совпадает с консольной нечувствительной скоростью или близка к ней. В этом случае следует изменить плоскость установки балансировочных грузов на консоли.
Балансировка консольного участка является операцией, завершающей процесс уравновешивания ротора. Поэтому эта балансировка проводится тогда, когда вибрация подшипников доведена до нормы, а вибрация консоли оказалась повышенной.
Консоль уравновешивается путем установки грузов в плоскости, перпендикулярной оси вращения ротора и расположенной по возможности ближе к концу консоли. Величина и угловое расположение уравновешивающих грузов определяются на основании измерений величины и фазы колебаний консоли до установки пробного груза и после нее.
Вес и расположение уравновешивающего груза ![]() определяются как отношение векторов начальных колебаний
определяются как отношение векторов начальных колебаний ![]() и колебаний от пробного груза
и колебаний от пробного груза ![]() , умноженное на вектор пробного груза
, умноженное на вектор пробного груза ![]() , взятый с обратным знаком
, взятый с обратным знаком
 . (26)
. (26)
Вычисления по формуле (26) производятся графоаналитически.
Для выбора веса пробного груза могут использоваться значения консольной балансировочной чувствительности ![]() , равной вектору колебаний конца консоли, возбуждаемых установкой на нее груза весом 1 кг.
, равной вектору колебаний конца консоли, возбуждаемых установкой на нее груза весом 1 кг.
Следует отметить, что устранение повышенных колебаний консольных участков роторов турбогенераторов путем балансировки начало практиковаться лишь в последние несколько лет. Выше был изложен первый опыт в этом направлении.
Дальнейшее накопление опыта, а также разработка теории вопроса должны привести к появлению новых методов, рассматривающих устранение динамического прогиба ротора и консоли как единый процесс балансировки ротора.
Для электрических машин характерно, что жесткость роторов различна в направлении оси обмотки и ее электрической нейтрали (оси полюсов). При горизонтальном расположении вала в результате действия силы тяжести возникает особый вид резонансных явлений, связанных с критическими скоростями второго рода. Не останавливаясь на подробном рассмотрении этого явления, заметим, что практически оно проявляется в виде составляющей вибрации с двойной оборотной частотой.
Амплитудный подъем вибрации этой частоты чаще всего возникает на скоростях вращения, равных половине значений нечетных критический скоростей.
Вибрация двойной оборотной частоты не связана с неуравновешенностью ротора и балансировкой не устраняется.
1. ОБЩИЕ ПОЛОЖЕНИЯ
Уравновешивание роторов современных крупных блочных турбоагрегатов протекает в сложных условиях, когда на один запуск с последующим остановом агрегата может быть затрачено около суток. Поэтому недостаточная продуманность операций при уравновешивании может привести к значительной потере времени и простою агрегата.
Одно из важнейших мероприятий, обеспечивающее правильность хода балансировки, - выявление характера неуравновешенности; правильное решение этой задачи позволит наметить наиболее рациональный план балансировки, выбрать оптимальную систему пробных грузов и произвести балансировку за минимальное число пусков.
Уравновешивание роторов турбоагрегата на месте установки должно являться заключительной операцией по снижению уровня вибраций подшипников машины, перед которой надлежит устранить все прочие дефекты, способствующие повышенной вибрации.
Однако на практике не всегда предоставляется время и возможность устранить все факторы, влияющие на вибрационное состояние машины, например, расцентровку агрегата из-за теплового нагрева фундаментов, резонансы отдельных элементов турбоустановки, тепловую нестабильность ротора генератора, воздействие электромагнитного поля и т.д.
В связи с этим до уравновешивания роторов приходится проанализировать перечисленные выше факторы, сделать заключение о целесообразности балансировки и необходимости учета отдельных факторов на заключительной стадии уравновешивания ротора. Поэтому операции по уравновешиванию роторов на электростанции должно предшествовать вибрационное исследование агрегата.
Перед составлением программы исследований необходимо произвести сбор и анализ основных сведений по монтажу, эксплуатации и ремонту машины. Большую ценность могут представить данные наблюдений за машиной в последний период ее эксплуатации. В некоторых случаях бывает целесообразным сопоставление вибрационного состояния нескольких однотипных агрегатов, что дает возможность выявить конструктивные недостатки отдельных узлов или установить наличие общих причин вибрации агрегатов данного типа.
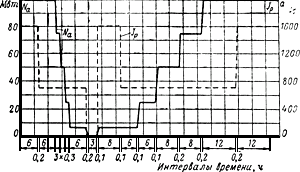
Типовая программа вибрационного исследования турбоагрегата состоит из серии опытов, проводимых по специальному режимному графику. Пример такого графика, составленного для случая исследований турбоагрегата типа К-100-130 - ТВ2-100-2, находящегося в эксплуатации, представлен на рис.15.
2. ВИБРАЦИОННОЕ ОБСЛЕДОВАНИЕ ТУРБОАГРЕГАТА
ПРИ НОМИНАЛЬНОМ РЕЖИМЕ
Вибрационное обследование проводится при стационарном тепловом состоянии турбоагрегата, работающего в условиях нормального эксплуатационного режима с номинальной электрической мощностью. Поскольку особенности поведения машины заранее не известны, важно, чтобы в период, предшествующий обследованию (за 5-6 ч), и непосредственно во время обследования на турбоагрегате поддерживались постоянные тепловые и электрические параметры, условия охлаждения генератора, а для турбин с отбором пара - постоянный расход пара в отбор.
В процессе обследования измеряют амплитуды и фазы вибрации:
а) верхних крышек опорных подшипников (на оси симметрии поперечного сечения вкладышей);
б) вала (при возможности доступа к нему);
в) статоров турбины и генератора;
г) отдельных участков фундамента - опор под статорами, колонн, площадок - при наличии их повышенной вибрации.
Измерения вибрации осуществляются в трех взаимно перпендикулярных направлениях: вертикальном и двух горизонтальных - поперечном и продольном (по отношению к оси агрегата).
Для возможности сопоставления фаз колебаний разных точек измерения следует обеспечить правильную фазировку стационарных вибродатчиков; при использовании ручного вибродатчика нужно строго соблюдать одинаковую ориентацию последнего при измерении одноименных составляющих вибраций.
Результаты измерений заносят в формуляр 1.
Формуляр 1
Вибрационное обследование турбоагрегата ст. N __
|
N |
Вре- |
|
|
|
|
Номер подшипника | |||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 | ||||||||||||||||||
|
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О | ||||||
|
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 | ||||||
|
1 |
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
0,98 |
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
75% |
|
0,98 |
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
4 |
|
50% |
|
0,98 |
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
25% |
|
0,98 |
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
5% |
0,98 |
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
5% |
50% |
|
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
5% |
100% |
|
" |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
5% |
100% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
![]() - активная нагрузка;
- активная нагрузка; ![]() - ток возбуждения;
- ток возбуждения; ![]() - температура ротора генератора;
- температура ротора генератора; ![]() - напряжение на выводах статора (в опытах с отключенным от сети генератором); В - вертикальная, П - поперечная, О - осевая (продольная) составляющая вибрация.
- напряжение на выводах статора (в опытах с отключенным от сети генератором); В - вертикальная, П - поперечная, О - осевая (продольная) составляющая вибрация.
|
Дата |
Подпись |
При вибрационном обследовании желателен гармонический анализ вибраций (по крайней мере, с определением 1-й и 2-й гармоник оборотной частоты). Данные гармонического анализа в некоторых случаях могут сразу выявить особенность вибрации агрегата. Преобладание повышенных значений составляющих колебаний, отличных от оборотной частоты, может быть достаточным основанием для отказа от немедленной балансировки впредь до устранения отмеченных ненормальностей.
Результаты гармонического анализа фиксируются в формуляре 2.
Формуляр 2
ГАРМОНИЧЕСКИЙ АНАЛИЗ ВИБРАЦИЙ
|
Турбогенератор N |
ГРЭС |
|
Показатели |
Анализ вибрации по гармоническим составляющим | |||||||||||||||||||||||
|
Номер подшипника | ||||||||||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 | |||||||||||||||||
|
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О | |
|
Размах суммарной вибрации, мк |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Двойные амплитуды гармоник, мк: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
3-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
4-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Относительное содержание гармоник (% от основной): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
3-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
4-я гармоника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Дата |
Подпись |
При необходимости дополнительных измерений полученные данные заносятся в специальные журналы и изображаются на графиках. Сюда, например, могут относиться снятие контурной характеристики подшипниковой опоры (в случае резко повышенной вибрации одной опоры), обследование статора генератора, фундамента и других элементов турбоустановок. При составлении схемы точек измерений исходят из задачи получения характера колебаний исследуемой конструкции (соотношение амплитуд и фаз колебаний отдельных участков, форма колебаний, выделение резонирующих элементов и пр.).
Данные обследования агрегата на номинальной нагрузке являются исходными для выявления характера и общего уровня вибрации турбоустановки.
3. ВЫЯВЛЕНИЕ ВЛИЯНИЯ РЕЖИМА РАБОТЫ НА ВИБРАЦИОННОЕ
СОСТОЯНИЕ ТУРБОАГРЕГАТА
а) Влияние крутящего момента и теплового состояния турбоустановки
Для оценки влияния центровки турбоагрегата в горячем состоянии на вибрационное состояние машины и выявления дефектов в работе соединительных (гибких) муфт проводится специальный опыт, успех которого зависит от того, насколько быстро будет проведена разгрузка турбоагрегата. Это дает возможность сохранить почти неизменными все остальные параметры, влияющие на вибрацию машины, в том числе тепловое состояние турбоустановки и температуру ротора генератора.
С этой целью за 5-6 ч до разгрузки на генераторе устанавливают минимум тока ротора генератора (![]() 0,98
0,98![]() 0,99). Разгрузка машины производится в возможно короткое время*. Ток ротора генератора при разгрузке сохраняется на постоянном уровне.
0,99). Разгрузка машины производится в возможно короткое время*. Ток ротора генератора при разгрузке сохраняется на постоянном уровне.
_______________
* В зависимости от типа турбины и котла темп разгрузки может быть различным, что связано с тепловым состоянием ц.в.д. турбины, отключением п.в.д., переходом на мазутное топливо и пр. Поэтому при обследованиях турбоагрегатов мощностью более 100 Мвт приходится идти на ступенчатую разгрузку и анализировать эффект от 50% или 40%-ной разгрузки.
Результаты эксперимента заносят в формуляр 1 и оформляют в виде графика (рис.16).
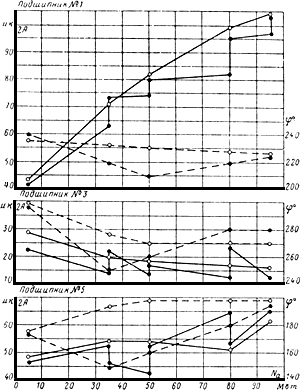
Рис.16. Поперечная вибрация подшипников при различной мощности
и тепловом состоянии турбоагрегата, ![]() 80 °С
80 °С
|
|
|
|
|
|
При анализе сопоставляются данные, полученные до и после быстрой разгрузки турбоагрегата. Если результаты опыта показывают значительное влияние крутящего момента на вибрацию машины, то перед уравновешиванием желательно проверить состояние соединительных муфт.
Неправильная работа гибких соединительных муфт возможна также вследствие тепловой расцентровки турбоагрегата, которая получается из-за нагрева и температурной деформации его элементов - фундамента, корпусов, подшипниковых опор. Поэтому для разделения влияния таких одновременно действующих факторов, как расцентровка и изменение крутящего момента, опыты быстрой разгрузки агрегата должны быть дополнены опытами медленного ступенчатого нагружения машины из холодного состояния с длительным (5-6 ч) прогревом на каждой ступени, соответствующей примерно 25, 50, 75 и 100% номинального значения активной нагрузки. При подъеме активной нагрузки ток ротора генератора поддерживается минимальным и принимаются меры к оптимальному охлаждению ротора генератора (обеспечивается минимально допустимый уровень температуры).
Влияние тепловой расцентровки выявляется путем сопоставления вибрационного состояния машины при одинаковых нагрузках до и после стабилизации теплового режима, а также путем сопоставления полученных данных с результатами опыта быстрой разгрузки турбоагрегата (рис.16). Поскольку в опытах быстрой разгрузки агрегата, а также в опытах ступенчатого нагружения с выдержками на определенных нагрузках будет происходить некоторый нагрев ротора генератора, что может сказаться на вибрационном состоянии агрегата, следует ввести коррективы на нагрев, для чего можно использовать результаты опытов, описанные ниже.
Повышение вибрации машины по мере ее нагрева при постоянных электрических параметрах и неизменной (после внесения поправок) температуре ротора генератора указывает на наличие тепловой расцентровки турбомашины.
б) Влияние температуры ротора генератора
Тепловая разбалансировка ротора характеризуется изменением его упругого прогиба под влиянием нагрева, а также связанным с этим изменением вибрации подшипников.
Причины тепловой нестабильности ротора различны. Большей частью это связано с неравномерным нагревом бочки ротора из-за витковых замыканий в обмотке ротора или уменьшением проходных сечений вентиляционных каналов из-за их засорения или смещения элементов обмотки ротора и т.д.
Тепловая разбалансировка возможна также из-за плохой термической стабилизации поковки ротора.
Тепловая разбалансировка ротора генератора выявляется при опыте с нагревом холодного ротора током. С этой целью производится быстрый набор реактивной нагрузки с последующим 6-8-часовым прогревом при номинальном токе возбуждения. Активная нагрузка во время всего опыта поддерживается на возможно минимальном уровне.
Контроль за температурой ротора генератора в процессе опыта производится с интервалом 30 мин по изменению сопротивления обмотки ротора. Для определения температуры меди обмотки используется приближенная формула
![]() °С.
°С.
Здесь ![]() - сопротивление ротора при опыте;
- сопротивление ротора при опыте; ![]() , где
, где ![]() и
и ![]() - напряжение и ток возбуждения, измеряемые во время опыта, a
- напряжение и ток возбуждения, измеряемые во время опыта, a ![]() - известное сопротивление ротора при определенной температуре
- известное сопротивление ротора при определенной температуре ![]() (по данным завода).
(по данным завода).
Для сравнения используются данные измерения вибрации агрегата при постоянном токе возбуждения в начале и по окончании нагрева ротора генератора, которые фиксируются в формуляре 1 и могут быть представлены в виде векторных диаграмм (рис.17).
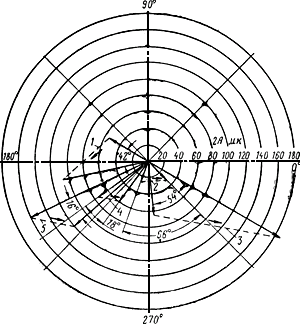
Рис.17. Изменение векторов вибрации под влиянием теплового небаланса:
1 - траектория вектора вертикальной вибрации подшипника N 5; 2 - траектория вектора поперечной
вибрации подшипника N 5; 3 - траектория вектора осевой вибрации подшипника N 5;
4 - траектория вектора вертикальной вибрации подшипника N 6;
5 - траектория вектора осевой вибрации подшипника N 6
При установлении факта тепловой разбалансировки уравновешивание ротора должно быть выполнено с учетом влияния на вибрацию нагрева ротора генератора (гл.V).
в) Влияние магнитного поля генератора
Для выявления влияния магнитного поля на вибрацию турбоустановки проводятся два опыта.
Первый опыт заключается в сравнении вибрационного состояния турбоагрегата при двух режимах:
режиме холостого хода без возбуждения;
режиме холостого хода с номинальным напряжением генератора.
Скорость вращения ротора при проведении опыта поддерживается номинальной.
Второй опыт проводится при включенном в сеть генераторе, несущим минимальную активную нагрузку. При этом быстро поднимают реактивную нагрузку с последующим разгружением. Ротор генератора в начале и в конце опыта должен оставаться холодным.
Результаты опытов фиксируются в формуляре 1 и оформляются в виде графиков и таблиц (рис.18 и табл.1).
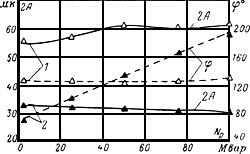
Рис.18. Изменение вертикальной вибрации подшипников турбогенератора при снижении реактивной нагрузки
(температура меди ротора ![]() 80 °С):
80 °С):
1 - подшипник N 5; 2 - подшипник N 6
Таблица 1
Воздействие возбуждения на вибрацию опор генератора
а) Размах вибросмещений (2![]() , мк) и фаза (
, мк) и фаза (![]() , град) основной гармоники колебаний
, град) основной гармоники колебаний
|
Режим холостого хода |
Передний подшипник |
Задний подшипник | ||||
|
В |
П |
О |
В |
П |
О | |
|
|
2 |
2 |
2 |
2 |
2 |
2 |
|
Без возбуждения |
42/160 |
33/192 |
42/270 |
26/170 |
8/140 |
65/85 |
|
С возбуждением |
43/192 |
31/174 |
64/240 |
24/205 |
10/128 |
83/100 |
б) Гармонический состав вибрации (2![]() , мк)
, мк)
|
Режим холостого хода |
Передний подшипник |
Задний подшипник | ||||||||||||||||
|
В |
П |
О |
В |
П |
О | |||||||||||||
|
Гармоники | ||||||||||||||||||
|
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 | |
|
Без возбуждения |
15 |
8 |
4 |
18 |
5 |
2 |
17 |
7 |
2 |
24 |
7 |
1 |
96 |
15 |
8 |
11 |
2 |
1 |
|
С возбуждением |
22 |
6 |
2 |
45 |
7 |
4 |
13 |
7 |
2 |
34 |
6 |
2 |
98 |
10 |
4 |
13 |
1 |
1 |
При проведении этих опытов желателен гармонический анализ вибрации, так как влияние магнитного поля у двухполюсных генераторов сопровождается усилением вибрации двойной оборотной частоты.
Влияние магнитного поля генератора на вибрационное состояние турбоагрегата чаще всего связано с нарушением симметрии магнитной индукции (из-за витковых замыканий в обмотке, неправильной установки ротора и пр.), а также с появлением вибрации элементов статора из-за ослабления их взаимного крепления. Все эти факторы не связаны с неуравновешенностью ротора, вследствие чего при обнаружении значительного воздействия электромагнитных сил на вибрацию агрегата следует в первую очередь принять меры к устранению указанных ненормальностей.
4. ВЫЯВЛЕНИЕ ХАРАКТЕРА НЕУРАВНОВЕШЕННОСТИ РОТОРОВ ТУРБОАГРЕГАТА
И РЕЗОНАНСА ЭЛЕМЕНТОВ ТУРБОУСТАНОВКИ
Выявление неуравновешенности роторов и резонансных колебаний элементов турбоагрегата осуществляется путем снятия ее скоростных характеристик. С этой целью после расхолаживания ротора генератора и отключения машины от сети проводят вибрационные измерения при ступенчатом изменении скорости вращения турбомашины (через 100-150 об/мин) в диапазоне 750-3200 об/мин. Скорость вращения определяют точным лабораторным тахометром, строботахометром или специальным частотомером.
При достижении определенной скорости вращения производят измерения амплитуд и фаз вибраций опорных подшипников (если возможно - вала) турбоагрегата, а также имеющих повышенную вибрацию элементов статора и фундамента.
Результаты измерений фиксируются в специальном формуляре 3 и используются для построения скоростных характеристик, на основании которых уточняются критические скорости вращения связанной системы гибких роторов, степень и характер их неуравновешенности, а также собственные частоты колебаний отдельных элементов турбоустановки.
Формуляр 3
Вибрационное обследование турбоагрегата ст. N __ при различных скоростях вращения
|
Скорость вращения, об/мин |
Номер подшипника | |||||||||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 | |||||||||||||
|
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О |
В |
П |
О | |
|
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 |
2 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
|
||||||||||||||||||
|
Дата |
Подпись |
Для успешного эксперимента необходим быстрый темп измерений, так как работа турбины на холостом ходу связана с разогревом выхлопной части и нарушением нормального положения цилиндра, что может вызвать дополнительные воздействия на вибрацию машины.
При анализе скоростных характеристик важно определить величину динамического заброса (пика) колебаний опор при прохождении критических скоростей, определить точно частоту, при которой наблюдаются эти резонансные пики, а также характер фазовых соотношений колебаний опор (концов вала) во всем исследуемом диапазоне частот.
Резкое возрастание амплитуд колебаний при прохождении соответствующей критической скорости с одновременно резким изменением фаз колебаний характеризует наличие неуравновешенности, вызывающей упругий прогиб ротора по форме, соответствующей данной критической скорости. При этом в общем случае симметричные составляющие неуравновешенности вызывают синфазные и кососимметричные - противофазные колебания подшипников.
У ротора в диапазоне скоростей, не превышающих 0,5![]() , упругий прогиб проявляется обычно только под воздействием первой формы неуравновешенности; при скоростях, превышающих примерно 0,5
, упругий прогиб проявляется обычно только под воздействием первой формы неуравновешенности; при скоростях, превышающих примерно 0,5![]() , на упругий прогиб начнет оказывать влияние составляющая второй формы неуравновешенности; составляющая третьей формы неуравновешенности проявится между
, на упругий прогиб начнет оказывать влияние составляющая второй формы неуравновешенности; составляющая третьей формы неуравновешенности проявится между ![]() и
и ![]() и так далее, где
и так далее, где ![]() ,
, ![]() ,
, ![]() - первая, вторая и третья критические скорости ротора.
- первая, вторая и третья критические скорости ротора.
Таким образом, чем выше лежат критические скорости по отношению к рабочей скорости вращения, чем меньше количество форм неуравновешенности ротора возбуждают его колебания, тем проще анализ и сам процесс уравновешивания.
При анализе скоростных характеристик необходимо определить:
а) характер неуравновешенности (симметричный, кососимметричный);
б) распределение неуравновешенности вдоль оси ротора.
Решение этих задач в общем случае может вызвать определенные трудности, в связи с чем следует четко представлять особенности воздействия на ротор основных форм неуравновешенности при условии изотропности опор.
1. Первая (симметричная) форма неуравновешенности, соответствующая первой форме свободных колебаний, характеризуется наличием максимума амплитуд вибраций на первой критической скорости ротора; фаза колебаний подшипников (концов вала) при проходе критической скорости имеет крутой поворот и изменяется на 160-180°.
Аналогично протекают скоростные характеристики и в случае действия на ротор неуравновешенности, распределенной по третьей форме, только пики амплитуд и резкие сдвиги фаз будут наблюдаться уже на третьей критической скорости.
2. Местонахождение симметричной неуравновешенности вдоль ротора также определяется по характеру амплитудных и фазовых ветвей скоростных характеристик.
При расположении симметричной неуравновешенности в средней части ротора фаза колебаний подшипников (концов вала) после обычного изменения (на 160-180°) при переходе первой критической скорости, по мере возрастания частоты вращения ротора, почти не изменяется или медленно возрастает (рис.19, ![]() ).
).
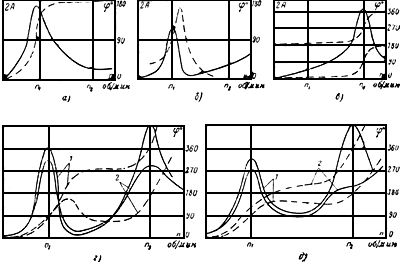
Рис.19. Скоростные характеристики колебаний опор одинаковой податливости
при различных видах неуравновешенности симметричного ротора:![]() - симметричная неуравновешенность в середине ротора; б - то же на концах ротора;
- симметричная неуравновешенность в середине ротора; б - то же на концах ротора;
в - кососимметричная неуравновешенность; г - кососимметричная и симметричная
неуравновешенность на концах ротора; д - кососимметричная и симметричная
неуравновешенность в средней части ротора; 1, 2 - номера опор; ![]() - амплитуда вибрации;
- амплитуда вибрации; ![]() - фаза вибрации;
- фаза вибрации; ![]() ,
, ![]() - критические скорости
- критические скорости
При расположении симметричной неуравновешенности вблизи концов ротора амплитуда колебаний подшипников (концов вала) после прохода первой критической скорости может резко снижаться. Минимум амплитуды соответствует совпадению узловых точек колеблющейся оси ротора с опорами (нечувствительная скорость). В результате фаза, помимо обычного изменения на критической скорости (на 160-180°), претерпевает вторичное изменение на 90-180°, соответствующее этим узловым точкам (рис.19, б).
По мере перемещения основного небаланса к середине ротора нечувствительная скорость будет перемещаться в область более высоких частот.
Если неуравновешенность окажется в узлах третьей формы прогиба, точки с нулевыми амплитудами исчезнут (нечувствительных скоростей не будет).
В зависимости от величины и распределения симметричной неуравновешенности кривые, представленные на рис.19, ![]() и б, могут претерпевать существенные изменения, однако характер их останется тем же: неизменность или увеличение фазы колебаний подшипников (концов вала) по мере повышения частоты будет свидетельствовать о расположении симметричной неуравновешенности в средней части ротора, а резкое изменение фазы после прохода первой критической скорости говорит о преимущественном распределении небаланса по концам ротора.
и б, могут претерпевать существенные изменения, однако характер их останется тем же: неизменность или увеличение фазы колебаний подшипников (концов вала) по мере повышения частоты будет свидетельствовать о расположении симметричной неуравновешенности в средней части ротора, а резкое изменение фазы после прохода первой критической скорости говорит о преимущественном распределении небаланса по концам ротора.
3. Кососимметричная неуравновешенность характеризуется резонансным пиком амплитуд колебаний опор (вала) с разностью фаз около 180° (рис.19, в). Данная форма неуравновешенности в частотном диапазоне до второй критической скорости характеризуется идентичными скоростными характеристиками вне зависимости от вида распределения кососимметричного небаланса вдоль ротора. Это обстоятельство не вносит затруднений при практической балансировке, и компенсация кососимметричных составляющих неуравновешенности турбинных и генераторных роторов всегда успешно осуществлялась установкой грузов в торцевые плоскости роторов.
4. Сочетание симметричной и кососимметричной неуравновешенностей при близком (по углу) расположении их плоскостей дает неравномерное распределение неуравновешенности вдоль ротора с концентрацией небаланса возле одной из опор. Особенностью динамического воздействия этого типа неуравновешенности является последовательное возбуждение резонансных колебаний на всех критических скоростях с появлением разных по величине амплитудных резонансных колебаний опор.
Фаза более нагруженной опоры после прохода критической скорости изменяется вторично на 90-180° (в обратную сторону) при частоте, соответствующей возникновению на данной опоре узловой точки (минимума амплитуд). Эта узловая точка разграничивает области симметричных и кососимметричных вибраций опор. Таким образом, присутствие кососимметричной составляющей неуравновешенности при произвольном распределении небаланса вдоль ротора характеризуется наличием значительных и разных по величине резонансных пиков колебаний опор на второй критической скорости, а также сдвигом фаз колебаний обеих опор на 90-180°.
5. Поскольку скоростные характеристики при действии кососимметричной составляющей небаланса в диапазоне до второй критической скорости не зависят от размещения этого вида небаланса, скоростные характеристики, полученные для общего случая распределения небаланса, дозволяют установить расположение симметричной неуравновешенности вдоль ротора:
а) если фазовые ветви характеристик обеих опор за первой критической скоростью резко расходятся примерно до 160-200°, а затем эта разность фаз колебаний опор сохраняется в широком диапазоне скоростей, то симметричные составляющие неуравновешенности расположены на концах ротора (рис.19, г);
б) если фазовые ветви характеристик опор в диапазоне от первой до второй критической скорости плавно расходятся, составляя разность от 60 до 120°, то симметричная составляющая неуравновешенности расположена в средней части ротора (рис.19, д).
При изотропных опорах симметричной конструкции балансируемого ротора и надежной балансировочной аппаратуре анализ составляющих неуравновешенности можно осуществить путем графического разложения на симметричные и кососимметричные составляющие векторов колебаний опор на фиксированных частотах вращения ротора (см. рис.11).
Анализ скоростных характеристик существенно осложняется при различной податливости подшипниковых опор. Разная податливость опор даже при симметричном распределении неуравновешенности вдоль ротора приводит к несовпадению по амплитудам максимумов на критических скоростях и к некоторому изменению общего характера протекания амплитудных и фазовых характеристик каждой опоры.
При симметричном распределении неуравновешенности и симметричной конструкции ротора отношение амплитуд колебаний опор на фиксированной (нерезонансной для опоры) частоте будет характеризовать отношение податливостей опор.
Фазовая характеристика более податливой опоры после прохода первой критической скорости будет претерпевать меньшие изменения, чем фазовая характеристика более жесткой опоры.
В связи с этим перед проведением анализа неуравновешенности по полученным скоростным характеристикам необходимо удостовериться (на основании заводских данных или результатов специальных экспериментальных исследований), что опоры ротора не имеют существенно различной податливости. Косвенным подтверждением указанного обстоятельства является совпадение (по амплитуде) резонансных пиков опор на первой критической скорости, а также скоростных характеристик опор в дорезонансной области частот при ![]() .
.
Помимо перечисленных выше факторов, в некоторых случаях анализ характеристик будет затрудняться резонансными колебаниями отдельных опор, влиянием конструктивной несимметричности ротора, расцентровкой агрегата и целым рядом других факторов, влияющих на перераспределение реакций между опорами.
Однако перечисленные трудности не исключают возможности анализа неуравновешенности и в этих условиях, хотя и с получением меньших подробностей. Так, значительный заброс амплитуд колебаний при проходе первой критической скорости всегда связан с наличием симметричной неуравновешенности, а преобладающий характер резонансных колебаний на второй критической скорости при минимальных пиках на первой критической скорости убедительно говорит о наличии кососимметричной составляющей небаланса.
В качестве иллюстрации на рис.20-22 приведены реальные скоростные характеристики колебаний опор генераторов типа ТВ2-100-2 при разных видах неуравновешенности.
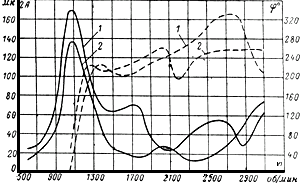
Рис.20. Скоростные характеристики колебаний подшипников турбогенератора
при симметричном распределении неуравновешенности:
1 - подшипник N 6; 2 - подшипник N 5; ![]() - амплитуда вибрации;
- амплитуда вибрации; ![]() - фаза вибрации
- фаза вибрации
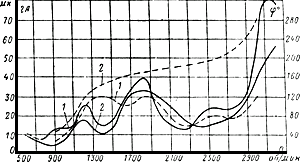
Рис.21. Скоростные характеристики колебаний подшипников турбогенератора
при кососимметричном распределении неуравновешенности:
1 - подшипник N 6; 2 - подшипник N 5; ![]() - амплитуда вибрации;
- амплитуда вибрации; ![]() - фаза вибрации
- фаза вибрации
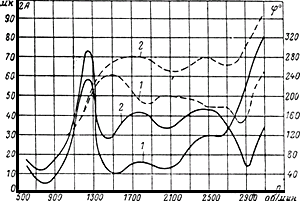
Рис.22. Скоростные характеристики колебаний подшипников турбогенератора
при сложном случае распределения неуравновешенности:
1 - подшипник N 6; 2 - подшипник N 5; ![]() - амплитуда вибрации;
- амплитуда вибрации; ![]() - фаза вибрации
- фаза вибрации
В первом случае (рис.20) характеристика имеет значительный пик колебаний при прохождении первой критической скорости (около 1100 об/мин) и незначительный подъем вблизи второй (около 3200 об/мин). Колебания опор почти синфазны во всем частотном диапазоне, в том числе и на второй критической скорости: на первой критической скорости произошло резкое изменение фаз до 220°, а затем фазы сохранялись приблизительно на одном уровне. Различие в амплитудных пиках характеристик связано с разной податливостью подшипниковых опор.
Такая скоростная характеристика соответствует преобладанию симметричной неуравновешенности ротора, расположенной в его средней части.
Во втором случае (рис.21) наблюдался значительный динамический заброс колебаний в зоне второй критической скорости (около 3200 об/мин) при несущественных резонансных пиках на первой критической скорости. Колебания опор в зоне второй критической скорости противофазны. Такая характеристика соответствует наличию кососимметричной неуравновешенности ротора.
В третьем случае (рис.22) скоростные характеристики опор имеют существенный заброс амплитуд колебаний как на первой, так и на второй критических скоростях. Колебания опор на первой критической скорости почти синфазны, а затем, по мере роста оборотов, расходятся, и на второй критической скорости разность фаз составляет 120°. На данном графике особенно легко заметить разную податливость опор. Из анализа характеристик видно, что ротор имеет как симметричную, так и кососимметричную составляющие небаланса, причем симметричный небаланс расположен преимущественно в средней части ротора.
Вращающиеся с переменной скоростью неуравновешенные тяжелые роторы служат хорошим возбудителем резонасных колебаний элементов турбоустановки. Поэтому параллельно с определением критических скоростей роторов в связанном состоянии выявляются и резонансные частоты колебаний подшипниковых опор, фундаментных балок и других частей. Практический интерес представляет выявление резонансов в зоне, близкой к рабочей скорости.
Наличие резонанса отдельных элементов конструкций обнаруживается после предварительного анализа результатов обследования турбоустановки на рабочей скорости вращения. При этом устанавливаются отдельные узлы, имеющие повышенную (по отношению к общему уровню) вибрацию, после чего проводится повторное изменение скорости вращения турбоагрегата в диапазоне 2700-3200 об/мин и выявляется характер изменения амплитуд и фаз колебаний обследуемых элементов.
Наличие резонанса определяется существованием пика амплитуд колебаний, лежащего вблизи рабочей скорости вращения (около 50 Гц), а также характерным для резонанса изменением фазы вибрации данного узла турбоустановки.
У двухполюсных генераторов силы, вызывающие вибрацию, имеют составляющие с частотой 50 и 100 Гц. Вследствие этого возможно возбуждение резонансных колебаний элементов турбоагрегата с частотой 100 Гц.
Резонанс отдельных подшипниковых опор и прилегающих к ним узлов фундамента создает повышенную чувствительность к неуравновешенности, что необходимо учесть при проведении балансировки путем максимально возможного снижения уровня вибрации резонирующей опоры. Реализация этого требования облегчается тем, что коэффициенты чувствительности данных опор к небалансу имеют значения, большие обычных, и установки больших уравновешивающих грузов не потребуется.
ГЛАВА III
МЕТОДИКА И АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ
При оценке вибрационного состояния машины, проведении уравновешивания и исследования вибрации необходимо производить измерения ряда параметров вибраций.
Для оценки вибрационного состояния агрегата в настоящее время принято значение размаха вибросмещения установившейся полигармонической вибрации. При уравновешивании машины необходимо измерять векторы вибраций (амплитуду и фазу) оборотной частоты. Для оценки уровня вибрации и проведения расчетов при балансировке принято использовать размах (двойную амплитуду) вибросмещения.
Вибрационные исследования агрегатов, обычно связанные со снятием скоростных и контурных характеристик подшипников, статоров, фундаментов и других узлов, а также частотные анализы вибрации, измерения вибрации агрегата на различных режимах и так далее проводятся при помощи специальной виброизмерительной аппаратуры.
В настоящее время широкое распространение получил электрический метод измерения вибраций с помощью сейсмических вибродатчиков. Сущность этого метода заключается в следующем. Корпус вибродатчика вводится в соприкосновение с вибрирующей поверхностью. Подвесная система датчика выполнена таким образом, что в рабочем диапазоне частот она остается неподвижной в пространстве, образуя искусственную неподвижную точку. Относительно этой точки и производятся измерения вибрации корпуса.
Перемещение корпуса относительно подвесной системы датчика преобразуется с помощью электромагнитной системы в соответствующее напряжение, которое измеряется с помощью электронного измерительного блока.
1. АППАРАТУРА ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ
а) Измерение размаха вибросмещения
Приборы, предназначенные для оценки вибрационного состояния турбоагрегата, должны непосредственно измерять размах вибросмещения, т.е. суммарное значение положительной и отрицательной амплитуд.
Приборы, измеряющие только положительную или отрицательную амплитуду вибросмещения, для оценки вибрационного состояния непригодны, так как при наличии в кривой вибрации четных гармоник значения положительной и отрицательной амплитуд могут быть различными. Для примера на рис.23 изображена кривая, содержащая 50% второй гармоники.
Рис.23. Кривая вибрации, содержащая 50% второй гармоники
Различные способы измерения размаха вибросмещения приведены на рис.24. Измерение размаха по электронно-лучевой трубке (ЭЛТ) осуществляется в приборах БИП-4, БИП-5, ВБП-4. При измерении размаха по стрелочному указателю детектируются положительное и отрицательное значение амплитуды вибрации, которые затем складываются. Сложение можно выполнить непосредственно в приборе с помощью электрической схемы. По такому принципу работают виброметры ИВП-1, ВИП-2 и МЭВ-7. Можно также измерять значения положительной и отрицательной амплитуд вибрации с последующим сложением этих значений. По такому принципу работает прибор УБП-1. Естественно, что автоматический способ сложения предпочтителен.
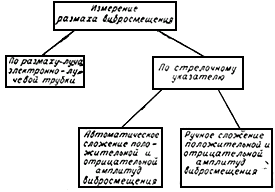
Рис.24. Способы измерения размаха вибросмещения
б) Выделение и измерение вибраций оборотной частоты
Для уравновешивания машины необходимо измерять амплитуду и фазу вибраций оборотной частоты (первая гармоника). Для этого в приборе должно осуществляться выделение составляющей вибраций оборотной частоты.
Различные способы выделения составляющей вибрации оборотной частоты приведены на рис.25.
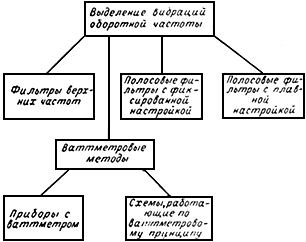
Рис.25. Способы выделения составляющей вибрации оборотной частоты
Электрические фильтры верхних частот имеют характеристику, изображенную на рис.26. Граничная частота, начиная с которой фильтр не пропускает сигнала, называется частотой среза. При включении какого-либо фильтра, например, фильтра 50 Гц, будет измеряться напряжение с частотами только до 50 Гц. При уравновешивании турбоагрегатов со скоростью вращения 3000 об/мин следует, очевидно, пользоваться фильтром 50 Гц. Электрические фильтры верхних частот пропускают все частоты, лежащие ниже частоты среза, поэтому при наличии низкочастотных составляющих в кривой вибрации работа их становится малоэффективной.
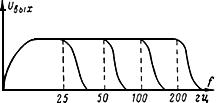
Рис.26. Частотные характеристики фильтров прибора БИП-5
Фильтры верхних частот применены в приборах БИП-5 (25, 50, 100 и 200 Гц) и УБП-1 (25, 50 и 100 Гц).
Полосовые фильтры производят выделение только узкой полосы частот и поэтому являются более совершенными, чем фильтры верхних частот. Характеристика типичного полосового фильтра изображена на рис.27. При работе с полосовыми фильтрами необходимо устанавливать значение ![]() равным частоте вращения. Если значение
равным частоте вращения. Если значение ![]() можно плавно изменять в диапазоне работы прибора, то фильтр имеет плавную настройку. Полосовые фильтры с плавной настройкой имеются в ряде иностранных приборов. Если прибор предназначен для работы на одной или нескольких фиксированных частотах, то применяются полосовые фильтры с фиксированной настройкой на эти частоты. Фильтр с фиксированной настройкой на частоту 50 Гц имеется в приборе ВБП-4.
можно плавно изменять в диапазоне работы прибора, то фильтр имеет плавную настройку. Полосовые фильтры с плавной настройкой имеются в ряде иностранных приборов. Если прибор предназначен для работы на одной или нескольких фиксированных частотах, то применяются полосовые фильтры с фиксированной настройкой на эти частоты. Фильтр с фиксированной настройкой на частоту 50 Гц имеется в приборе ВБП-4.
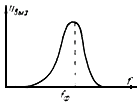
Рис.27. Частотная характеристика полосового фильтра
Ваттметровые методы выделения вибрации оборотной частоты основаны на свойствах электродинамического измерительного механизма.
Как известно, при питании одной из обмоток ваттметра чисто синусоидальным и постоянным по величине напряжением оборотной частоты (опорное напряжение) и подаче на его другую обмотку напряжения полигармонической вибрации (измеряемое напряжение) угол отклонения подвижной части оказывается пропорциональным амплитуде вибрации оборотной частоты. Угол отклонения подвижной части ваттметрового механизма равен:
![]() ,
,
где ![]() - угол отклонения подвижной части;
- угол отклонения подвижной части;
![]() - ток в неподвижной обмотке ваттметра;
- ток в неподвижной обмотке ваттметра;
![]() - ток в подвижной обмотке ваттметра;
- ток в подвижной обмотке ваттметра;
![]() - угол между токами
- угол между токами ![]() и
и ![]() .
.
Если поддерживать ![]() постоянным, то
постоянным, то ![]() .
.
Очевидно, что ![]() будет максимальным при
будет максимальным при ![]() 0, т.е. при отсчете амплитуды вибрации необходимо, чтобы
0, т.е. при отсчете амплитуды вибрации необходимо, чтобы ![]() и
и ![]() были в фазе. Для обеспечения этого условия фаза одного из токов разворачивается с помощью фазорегулятора.
были в фазе. Для обеспечения этого условия фаза одного из токов разворачивается с помощью фазорегулятора.
Таким образом, ваттметровый измерительный механизм при работе в описанном режиме эквивалентен узкополосному фильтру.
Так как угол отклонения подвижной части зависит от угла между опорными и измеряемыми напряжениями, то имеется возможность измерять и фазу вибрации. Для этого при помощи фазорегулятора стрелка прибора устанавливается на нуль [![]() 90°] и по шкале фазорегулятора производится отсчет фазы. Затем ротор фазорегулятора разворачивается на 90° и производится отсчет амплитуды первой гармоники вибрации.
90°] и по шкале фазорегулятора производится отсчет фазы. Затем ротор фазорегулятора разворачивается на 90° и производится отсчет амплитуды первой гармоники вибрации.
Для удобства работы на роторе делаются две обмотки, сдвинутые на 90°. В этом случае вначале на ваттметре устанавливается нулевое показание и производится отсчет фазы вибрации, а затем переключение обмоток ротора фазорегулятора и отсчет амплитуды вибрации.
Для оценки вибрационного состояния ваттметровые приборы непригодны, так как они не измеряют размаха полигармонической вибрации. Различные модификации ваттметровых приборов довольно широко распространены за рубежом. В СССР такие приборы в основном используются на балансировочных станках.
в) Измерение фазы вибрации
Для уравновешивания необходимо измерять фазу вибрации оборотной частоты*. Различные способы измерения фазы вибрации, применяемые в современных приборах, изображены на рис.28. Стробоскопические фазоуказатели работают на принципе стробоскопического эффекта. Импульсы света специальной строболампы синхронизируются напряжением вибрации, которое преобразуется в электрические импульсы с помощью электронной схемы. Импульсная схема включается после фильтров прибора. Стробоскопический метод измерения фазы применяется в приборах БИП-4, БИП-5, ВБП-4, УБП-1, ИВП-1, МЭВ-7 и др.
________________
* Под фазой вибрации подразумевается сдвиг фазы между вектором измеряемой вибрации и вектором опорного процесса, жестко связанного по фазе с вращением уравновешиваемого ротора.

Рис.28. Способы измерения фазы вибрации
Компенсационные фазоуказатели работают по принципу сравнения фаз двух напряжений. Одно из этих напряжений является опорным и может поворачиваться по фазе специальным фазорегулятором.
В настоящее время из многочисленных модификаций этой схемы наибольшее распространение получила схема с генератором опорного напряжения (ГОН), фазорегулятором и электроннолучевой трубкой. Опорное напряжение вырабатывается ГОН, который соединяется с валом балансируемой машины. В качестве ГОН используется трехфазный малогабаритный электрический генератор переменного тока, ротор которого, как правило, выполняется из постоянного магнита. В качестве ГОН используются иногда и двухфазные генераторы. При работе с трехфазной системой в качестве опорного напряжения может быть непосредственно использовано трехфазное напряжение, снимаемое с измерительных трансформаторов напряжения балансируемого турбогенератора. Фазорегулятором служит обычно малогабаритная трехфазная электрическая машина с фазным ротором. Индикатором совпадения фазы опорного и измеряемого напряжений служит электроннолучевая трубка. Совпадение фаз фиксируется по фигуре Лиссажу. Отсчет фазы вибрации производится по шкале фазорегулятора. В качестве фазорегулятора и ГОН обычно используются электрические машины малой мощности, предназначенные для схем сельсинной автоматики. Поэтому описанный метод измерения фазы носит название "по сельсину".
г) Анализ частотного спектра вибраций
Для целей частотного анализа служат анализаторы гармоник. Принцип действия анализаторов основан на использовании частотно-избирательных свойств ![]() - или
- или ![]() -цепей. Различают пассивные и активные фильтры. В активных фильтрах
-цепей. Различают пассивные и активные фильтры. В активных фильтрах ![]() - или
- или ![]() -цепи обычно включаются в цепи обратной связи усилителей. Применяются также гетеродинные анализаторы гармоник. Принцип действия таких анализаторов заключается в смешении исследуемого полигармонического напряжения с синусоидальным напряжением генератора переменной частоты (гетеродина), находящегося в приборе. В настоящее время существует много анализаторов, различающихся по принципу действия, точности, диапазону частот, габаритам, быстродействию и другим параметрам.
-цепи обычно включаются в цепи обратной связи усилителей. Применяются также гетеродинные анализаторы гармоник. Принцип действия таких анализаторов заключается в смешении исследуемого полигармонического напряжения с синусоидальным напряжением генератора переменной частоты (гетеродина), находящегося в приборе. В настоящее время существует много анализаторов, различающихся по принципу действия, точности, диапазону частот, габаритам, быстродействию и другим параметрам.
К анализаторам для турбоагрегатов предъявляется ряд специфических требований главным образом в отношении частотного диапазона, быстродействия, габарита и веса, простоты обслуживания и т.д. Поэтому применение анализаторов общего назначения недостаточно удобно и эффективно. Специальные приборы для анализа вибраций турбоагрегатов только теперь начинают разрабатываться. В настоящее время для частотного анализа вибраций турбоагрегата выпускается анализатор типа АСВ-2М.
Если в спектре вибраций наблюдается преобладающее значение какой-либо гармоники, то приближенный анализ может быть произведен с помощью нескольких фильтров верхних частот. Для целей частотного анализа можно также производить запись кривой вибрации на шлейфный осциллограф с последующей расшифровкой. Выход на шлейфный осциллограф имеют приборы типов БИП-4, БИП-5, ВБП-4 и МЭВ-7.
д) Современные приборы для измерения вибрации и уравновешивания турбоагрегатов
Современные виброизмерительные приборы обычно выполняются комбинированными и могут осуществлять измерение нескольких параметров одновременно. Типичным прибором такого типа является балансировочно-исследовательский прибор БИП-5, который получил в СССР наиболее широкое распространение.
Прибор БИП-5 работает в частотном диапазоне 15-200 Гц (900-1200 об/мин) и позволяет измерять следующие вибропараметры:
а) вибросмещение, виброскорость, виброускорение;
б) фазу вибрации - по методу "стробоскопа" и по методу "сельсина";
в) частоту вибрации.
В приборе имеются полосовые фильтры верхних частот с частотами среза 25, 50, 100 и 200 Гц, которые облегчают процесс уравновешивания и позволяют проводить простейший качественный анализ гармонических вибраций. Кроме того, в приборе имеется электронно-лучевая трубка для визуального просмотра формы кривой вибрации и выход на шлейфный осциллограф для записи. Ниже приводятся краткие технические характеристики прибора БИП-5.
1. Основная приведенная погрешность измерения амплитуд вибросмещений не превышает ±10%.
2. Основная приведенная погрешность измерения амплитуд вибросмещений в пределах 10-400 мк и в частотном диапазоне 20-55 Гц не превышает ±5%.
3. Основная погрешность при измерении фазы синусоидальных колебаний по методу "сельсина" ±2°, по методу "стробоскопа" ±3°.
4. Температурный диапазон работы прибора 5-60 °С. Прибор БИП-5 является одноканальным, но имеет в комплекте два вибродатчика, которые поочередно могут подключаться к измерительному блоку.
Кроме прибора БИП-5, в СССР выпускаются промышленностью балансировочные приборы типа УБП-1. Одноканальный виброизмерительный прибор УБП-1 (выпуск таганрогского завода "Виброприбор") имеет частотный диапазон 12,5-100 Гц. Прибор снабжен фильтрами верхних частот с частотами среза 25, 50 и 100 Гц. Как показали испытания, фильтры прибора имеют неудовлетворительные характеристики. Измерение фазы вибрации осуществляется стробоскопом. Приборы УБП-1 уступают приборам БИП-5 как по возможности измерений, так и по качеству.
На заводах - изготовителях турбогенераторов, турбин и другого энергооборудования, а также в ряде научно-исследовательских институтов и лабораторий разработаны и выпущены в небольшом количестве различные специализированные виброизмерительные и балансировочные приборы. Эти приборы предназначены для работы в специальных условиях производства, например на стационарных испытательных стендах и т.п. Ниже приводится краткое техническое описание некоторых из этих приборов.
Прибор ВБП-4 (разработка и изготовление ЛФ ВНИИЭМ и завода "Электросила") - двухканальное многоточечное виброизмерительное устройство. Частотный диапазон работы - 10-150 Гц. Имеется полосовой фильтр с частотой настройки 50 Гц. Измерение фазы вибрации осуществляется по методу "стробоскопа" и по методу "сельсина". Прибор имеет устройство для определения частоты вибрации и скорости вращения ротора. Для просмотра формы кривой вибрации имеется электронно-лучевая трубка, а для записи - выход на шлейфный осциллограф.
Прибор ИВП-1 (выпуск Ростовэнергоремонта) - одноканальный прибор для измерения размаха вибрации. Частотный диапазон работы 15-100 Гц. Фильтры в приборе отсутствуют. Фаза измеряется только стробоскопом.
Прибор МЭВ-7 (разработка и изготовление ЛФ ВНИИЭМ и завода "Электросила"). Частотный диапазон работы 10-100 Гц. Фильтры в приборе отсутствуют. Измерение фазы вибрации осуществляется по методу "стробоскопа". Имеется выход на электронный и шлейфный осциллограф.
Прибор ВИП-2 (разработка и изготовление ЛФ ВНИИЭМ и завода "Электросила") - портативный одноканальный виброметр с автономным питанием. Частотный диапазон работы 9-150 Гц.
Прибор АФ-2 (разработка и изготовление ЛФ ВНИИЭМ и завода "Электросила") - одноканальный виброметр с автономным питанием. Частотный диапазон работы 9-150 Гц. Измерение фазы производится только по методу "сельсина". Выделение вибраций оборотной частоты производится с помощью электронной ваттметровой схемы.
е) Измерение вибрации валов турбоагрегатов
Ввиду отсутствия специальной аппаратуры для измерения вибрации валов турбогенераторов применяются те же приборы, что и для измерения вибрации опор. Для измерения вибрации вала датчик-виброщуп снабжается специальным наконечником с меднографитовой щеткой, которая прижимается к валу вручную. Подобный способ измерений оказывается малоэффективным в случаях:
измерения больших уровней вибрации;
измерения в труднодоступных местах;
проведения длительных непрерывных измерений.
В последнее время появились приборы для бесконтактного измерения вибраций валов с помощью параметрических (индуктивных или емкостных) датчиков на несущей частоте. Закрепление таких датчиков осуществляется либо жестко на неподвижных элементах, либо через инерционный подвес. У некоторых систем бесконтактных виброметров наблюдается зависимость показаний от величины рабочего зазора между датчиком и валом. Для устранения этого явления иногда осуществляется автоматическое поддержание рабочего зазора датчика. Имеются также приборы, у которых независимость их показаний от величины рабочего зазора достигается за счет автоматической регулировки усиления.
В настоящее время еще нет достаточного опыта работы с бесконтактными виброметрами, но проводимые работы позволяют предполагать, что в недалеком будущем такие приборы войдут в практику исследований и балансировок.
2. МЕТОДИКА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ ТУРБОАГРЕГАТОВ
а) Измерение амплитуды вибрации
При измерении вибраций вибродатчик может закрепляться на объекте либо использоваться в качестве виброщупа. Закрепление вибродатчиков на подшипниках турбоагрегата особенно целесообразно при уравновешивании и снятии скоростных характеристик. В этом случае повышается производительность труда, точность измерения и сохраняются неизменными условия измерения от пуска к пуску, что особенно важно при уравновешивании машины. Для проведения уравновешивания вибродатчики обычно устанавливаются на крышки подшипников вместо стационарных вибродатчиков и закрепляются хомутами или болтами. Если необходимо производить многоточечные измерения, то следует использовать вибродатчик в качестве переносного виброщупа.
Для оценки вибрационного состояния турбоагрегата измерения производятся в соответствии с ГОСТ 5908-51 и ГОСТ 533-51 для машин, принимаемых из монтажа, и с "Правилами технической эксплуатации электрических станций и сетей" *для машин, находящихся в эксплуатации.
_________________
* На территории Российской Федерации действуют "Правила технической эксплуатации электрических станций и сетей Российской Федерации", утвержденные приказом Минэнерго России от 19.06.2003 N 229, здесь и далее. - Примечание изготовителя базы данных.
При балансировке вибрация, как правило, измеряется на верхней крышке подшипника, над поперечной осью симметрии вкладыша. Места измерения вибрации в процессе балансировки меняться не должны. Для расчета уравновешивающих грузов используются обычно вертикальные составляющие вибрации, так как по вертикальному направлению система ротор-опоры обладает большей линейностью. Если жесткость подшипников по горизонтальному направлению значительно меньше, чем по вертикальному, то целесообразно проводить балансировку по горизонтальным составляющим вибрации.
В процессе проведения уравновешивания необходимо поддерживать постоянной скорость вращения. Скорость вращения можно контролировать по тахометру или частотомеру виброизмерительного прибора. Точность измерения скорости вращения должна быть не ниже 2%.
Необходимо учитывать, что измерения величины вибрации опор турбоагрегата зависят от места измерения. Как правило, вибрация увеличивается от подошвы подшипника к его крышке.
При использовании вибродатчика в качестве переносного виброщупа обычно применяется штырь, который ввертывается в корпус датчика. Во время измерения датчик упирается штырем в измеряемую точку. Сила нажатия руки должна обеспечивать безотрывное следование острия за вибрирующим объектом. Применение виброщупа без острия нежелательно. Однако в случае измерения вибрации фундаментов, статоров больших корпусов и т.п. можно применять виброщуп без острия.
б) Измерение фазы вибрации
Измерение фазы вибрации может производиться по методу "стробоскопа" или по методу "сельсина". Для измерения фазы вибрации стробоскопом необходимо иметь свободный торец вала. На торце вала краской или мелом наносится радиальная черта-указатель, а рядом устанавливается круговая шкала, при этом желательно, чтобы плоскости неподвижной круговой шкалы и торца вала совпадали (рис.29). В некоторых случаях удобно расположить на роторе как шкалу для отсчета угла установки грузов, так и шкалу для отсчета фазы вибрации. Черта-указатель в этом случае наносится на корпусе подшипника. Направление разбивки обеих шкал на роторе будет одинаковым. При освещении торца ротора импульсной стробоскопической лампой ротор кажется неподвижным. Значение угла, совпадающего при этом с нулевым радиус-вектором, принимается за фазу вибрации. Если плоскость шкалы смещена относительно торца вала, то точность отсчета фазы падает.
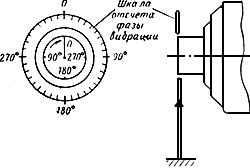
Рис.29. Установка шкалы для измерения фазы стробоскопом
Шкала изготовляется на картоне или другом плотном материале. Рекомендуемая цена деления шкалы 5°. В крайнем случае возможно измерение фазы вибрации стробоскопом и при отсутствии свободного торца вала (рис.30). Черта-указатель наносится в этом случае на выступающий из подшипника конец вала или полумуфту, а неподвижная шкала - на корпус уплотнения. Для облегчения наблюдения за чертой-указателем, когда она находится снизу, на вал наносится второй указатель под углом 180° к первому. Тогда наблюдение за одним из указателей всегда возможно сверху. Чтобы избежать ошибки, вторая риска помечается дополнительно. Если при освещении ротора стробоскопом виден второй указатель, то для получения значения фазы вибрации к отсчитанному углу следует прибавлять 180°.
Рис.30. Измерение фазы стробоскопом:![]() - нулевая черта-указатель
- нулевая черта-указатель
При отсчете фазы вибрации по методу "сельсина" генератор опорного напряжения закрепляется с торца агрегата. Различные, наиболее часто встречающиеся случаи крепления ГОН схематично показаны на рис.31. Крепление по схеме ![]() возможно, если в торце вала имеется отверстие или зенковка (обычно для переносного тахометра). Тогда в центре торца вала засверливается отверстие под резьбу М8 или М10, в которое ввертывается шпилька. Шпильку необходимо закрепить гайкой. На выступающий конец шпильки надевается резиновая трубка, при помощи которой шпилька соединяется с валом ГОН. Во избежание проворачивания на трубку надеваются хомутики.
возможно, если в торце вала имеется отверстие или зенковка (обычно для переносного тахометра). Тогда в центре торца вала засверливается отверстие под резьбу М8 или М10, в которое ввертывается шпилька. Шпильку необходимо закрепить гайкой. На выступающий конец шпильки надевается резиновая трубка, при помощи которой шпилька соединяется с валом ГОН. Во избежание проворачивания на трубку надеваются хомутики.
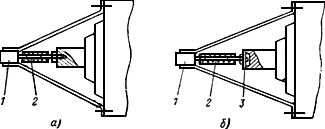
Рис.31. Способы установки генератора опорного напряжения:
1 - ГОН; 2 - резиновая трубка; 3 - планка
Статор ГОН обычно при помощи лап крепится к подшипнику. Возможно также использование подставок или других креплений. Если торец вала не имеет центрального отверстия (рис.31, б), то возможно применение планки, в центре которой укреплена шпилька. Такое крепление удобно осуществлять, если на роторе имеются резьбовые отверстия по окружности.
При установке ГОН необходимо иметь в виду следующее: крепление статора ГОН должно допускать его центровку относительно балансируемого ротора. Эластичное соединение резиновой трубкой допускает производить центровку "на глаз". Чем лучше произведена центровка, тем более надежно работает соединение. Хорошо сцентрированный ГОН может работать непрерывно много суток. В случае длительной работы желательно применять трубку из маслостойкой резины. Если такой резины нет, то с помощью картонных или жестяных щитков брызги масла необходимо отбивать в сторону. Диаметр соединительной трубки должен быть несколько меньше диаметра шпильки и вала ГОН. Толщина стенки должна обеспечивать работу трубки без скручивания. Обычно момент ГОН очень мал, так что достаточно брать трубку с толщиной стенки 2-3 мм. Длина трубки выбирается с учетом разбега (осевого перемещения) агрегата. Применение слишком длинной трубки может привести к ее скручиванию. Все крепление ГОН должно быть достаточно жестким и не должно допускать проворота статора или соединительной трубки.
Если в качестве ГОН используется статор турбогенератора, то необходимо иметь в виду, что трехфазное напряжение величиной 100 В подводится от измерительных трансформаторов. Турбогенератор обычно работает при этом в режиме холостого хода с возбуждением. Для удобства и безопасности работы напряжение необходимо подвести через трехфазный рубильник, который должен быть укреплен на столе. Рубильник необходимо применять закрытый, обязательно с предохранителями на каждой фазе. Вся проводка должна быть тщательно выполнена, чтобы избежать случаев замыкания фаз между собой или на землю. Обычно напряжение, развиваемое ГОН, составляет несколько вольт, и фазорегулятор в приборе рассчитан на это напряжение. Напряжение измерительных трансформаторов поступает на фазорегулятор прибора через гасящие сопротивления, которые встроены внутрь прибора (БИП-4, БИП-5, ВБП-4). При использовании в качестве ГОН статора турбогенератора необходимо учитывать, что при включении турбогенератора в сеть и его работе под нагрузкой может появиться существенная погрешность измерения фазы вибраций. Поэтому в случае необходимости сравнения фазы вибрации на холостом ходу и под нагрузкой целесообразно применение автономного генератора опорного напряжения или параллельное использование стробоскопа.
в) Измерение вибрации валов и консолей турбоагрегатов
Измерение вибрации вала обычно осуществляется на выходе из подшипника. Если по измеренным вибрациям вала производится балансировка машины, то основным направлением принимается вертикальное. Измерение вибрации вала производится на свободных участках непосредственно на выходе из подшипников. Места измерения должны располагаться с одинаковых сторон (внутренней или внешней) подшипников, а также по возможности на равных расстояниях от балансировочных плоскостей.
Для измерений выбирается участок, имеющий хорошо обработанную поверхность. Статическое биение этого участка (по индикатору) не должно превышать 0,03 мм. Если поверхность загрязнена, то ее необходимо предварительно зачистить шкуркой и смазать турбинным маслом. Вибродатчик вручную прижимается к валу через меднографитную щетку. Сила нажатия должна обеспечивать безотрывное соприкосновение штыря датчика с валом. Слишком сильное нажатие приводит к быстрому износу щетки. Для лучшей работы контактную щетку периодически следует смазывать турбинным маслом.
Если на подлежащем измерению консольном участке вала имеются контактные кольца, то можно измерять вибрацию, упираясь виброщупом в какую-либо щетку. Однако следует иметь в виду, что величина вибрации контактных колец может заметно отличаться от вибрации самого вала в случае неравномерного износа кольца или его перекоса. Поэтому для того чтобы убедиться в достоверности показаний, необходимо проверить биение кольца при помощи индикатора.
При измерении вибрации вала необходимо соблюдать особую осторожность, а во время измерений на контактных кольцах необходимо пользоваться резиновыми перчатками и ковриком.
3. СОГЛАСОВАНИЕ ЭЛЕМЕНТОВ ВИБРОИЗМЕРИТЕЛЬНОЙ АППАРАТУРЫ
Уравновешивание машины связано с необходимостью установки на ротор пробных и уравновешивающих грузов. Положение грузов на роторе определяется в системе полярных координат*, связанных с ротором. За начало отсчета принимается нулевой радиус-вектор, который наносится на ротор произвольно. Обычно на роторе имеются две плоскости исправления и более. Нулевые радиус-векторы всех этих плоскостей должны совпадать. Если отсчет фазы вибрации производится стробоскопом, то черту-указатель удобно принимать за нулевой радиус-вектор вращающейся шкалы. Нулевой радиус-вектор и угловую разметку ротора обычно связывают с крепежными или другими элементами ротора, например, лопатками вентилятора.
_______________
* В полярной системе координат модуль вектора определяется величиной радиуса, а его аргумент - величиной угла от нулевого радиус-вектора в принятом направлении.
Векторы вибрации также отсчитываются в полярной системе координат. Для правильного расчета уравновешивающих грузов необходимо обеспечить соответствие систем отсчета векторов сил и вызываемой ими вибрации. Это значит, что при увеличении (уменьшении) фазы силы должна увеличиваться (уменьшаться) фаза вибрации. Для согласования систем отсчета векторов необходимо производить фазировку элементов фазоотсчетных устройств балансировочных приборов.
При отсчете фазы вибрации по методу "стробоскопа" разбивка вращающейся шкалы на роторе и неподвижной шкалы должна быть выполнена в разные стороны (см. рис.29): разбивка вращающейся шкалы производится против направления вращения, а неподвижной - по направлению вращения.
За начало отсчета (нуль) неподвижной шкалы обычно принимается вертикальное направление. При измерении фазы по методу "сельсина" выполнение условий согласования зависит от порядка следования фаз генератора опорного напряжения и приемного фазорегулятора. Для проверки правильности порядка следования фаз необходимо измерять вибрации подшипника в точках 1 и 2, указанных на рис.32. Соединения выполнены правильно, если в направлении от точки 1 к точке 2 значение фазы вибраций растет, и неправильно, если падает. Например:
|
Правильно |
Неправильно |
|
|
|
|
|
|
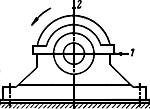
Рис.32. Метод проверки фазировки сельсина:
1 и 2 - точки измерения вибрации подшипника
Если в приборе предусматриваются оба способа измерения фазы вибрации, лучше проверить фазировку сельсинной схемы по стробоскопу. Для этого необходимо измерить фазу вибрации в двух каких-либо точках двумя методами. Порядок следования фаз сельсинной схемы правильный, если при переходе от одной вибрации к другой фаза, отсчитанная по методу "сельсина", меняется в том же направлении, что и отсчитанная по стробоскопу. Например:
|
Точка 1 |
Точка 2 |
|||
|
Вибрация |
|
|||
|
Вибрация |
|
|||
Если обнаружится, что порядок следования фаз неправильный, то необходимо поменять местами две любые фазы генератора опорного напряжения.
Напряжение вибродатчика изменяется на 180° при перемене местами концов его обмотки. Для получения одинаковых результатов при измерении вибрации несколькими вибродатчиками они должны быть сфазированы. Обычно датчики, имеющиеся в комплекте прибора, фазируются при изготовлении. Контактные элементы соединительных шлангов выполняются таким образом, чтобы обеспечить единообразное включение. Для проверки фазировки измеряют фазу вибрации в какой-либо одной точке несколькими датчиками. Датчики сфазированы, если все измененные значения фазы одинаковы.
При проведении вибрационных исследований иногда приходится определять и сравнивать между собой векторы (амплитуды и фазы) вибрации в различных точках турбоустановки. Для этого при измерении какой-либо составляющей вибрации, например горизонтальной, необходимо располагать оси подвижных систем датчиков в одном направлении. Если вибрацию в каких-либо точках измерять в требуемом направлении затруднительно, то можно разворачивать датчик на 180°. Значение измеренной фазы при этом, естественно, также необходимо изменить на 180°.
Согласование нескольких комплектов виброизмерительной аппаратуры проводится обычно на специальных стендах. При необходимости можно проводить проверку согласования комплектов, измеряя вектор вибрации в одной точке разными приборами.
Для использования векторов чувствительностей (гл.I) при работе одним комплектом приборов необходимо соблюдать следующие правила:
а) все датчики в комплекте должны быть сфазированы;
б) при измерении фазы вибрации стробоскопом начало отсчета неподвижной шкалы должно совпадать с вертикалью;
в) нулевой радиус-вектор вращающейся шкалы должен быть одновременно чертой-указателем для отсчета фазы;
г) разметка вращающейся шкалы на роторе должна производиться против направления вращения;
д) при измерении фазы вибраций с опорным генератором ротор и статор ГОН должны иметь нулевые отметки, которые должны совмещаться с нулевым радиус-вектором вращающейся шкалы.
Если в качестве ГОН используется статор балансируемого генератора или если ротор и статор ГОН не имеют нулевых отметок, то необходимо определить поправку к показаниям фазы с помощью стробоскопа, для которого известно значение начального угла и выполнены условия пп.а-г;
е) для использования значения векторов чувствительностей при работе несколькими однотипными или разными комплектами виброизмерительной аппаратуры необходимо согласовать их датчики и фазоотсчетные устройства в лабораторных условиях.
Предварительное определение фазы небаланса целесообразно производить при уравновешивании ротора с неизвестной чувствительностью ![]() . При этом всегда можно установить пробный груз так, чтобы вызвать уменьшение вибрации. Для определения фазы небаланса (тяжелого места) необходимо знать:
. При этом всегда можно установить пробный груз так, чтобы вызвать уменьшение вибрации. Для определения фазы небаланса (тяжелого места) необходимо знать:
1. Сдвиг фаз между небалансом (возмущающей силой) и вибрацией ![]() . Как известно, сдвиг фаз между возмущающей силой и перемещением определяется соотношением рабочей и критической скоростей и величиной затухания в системе. На основании опытных данных принимаем коэффициент затухания равным 0,2. Для этого случая зависимость
. Как известно, сдвиг фаз между возмущающей силой и перемещением определяется соотношением рабочей и критической скоростей и величиной затухания в системе. На основании опытных данных принимаем коэффициент затухания равным 0,2. Для этого случая зависимость ![]() от соотношения скоростей изображена на рис.33.
от соотношения скоростей изображена на рис.33.
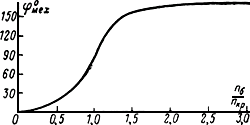
Рис.33. Зависимость ![]() от соотношения скоростей
от соотношения скоростей
2. Сдвиг фаз в приборе ![]() . Обычно предварительное определение фазы небаланса производят с помощью стробоскопа. При измерении вибрации стробоскопом имеет место следующее соотношение:
. Обычно предварительное определение фазы небаланса производят с помощью стробоскопа. При измерении вибрации стробоскопом имеет место следующее соотношение:
![]() ,
,
где ![]() - измеренная фаза вибрации;
- измеренная фаза вибрации;
![]() - фаза небаланса.
- фаза небаланса.
Для прибора БИП-5 при включении фильтра 50 Гц ![]() может быть принята равной нулю в диапазоне скоростей от 2500 до 3100 об/мин.
может быть принята равной нулю в диапазоне скоростей от 2500 до 3100 об/мин.
Тогда
![]()
и фаза уравновешивающего груза
![]() .
.
Если балансировочная скорость отличается от указанной выше или если для уравновешивания применяются приборы других типов, то ![]() предварительно необходимо определить на вибростенде.
предварительно необходимо определить на вибростенде.
1. ПОДГОТОВКА К БАЛАНСИРОВКЕ
Перед балансировкой ротора необходимо подготовить виброизмерительную аппаратуру и выполнить следующие работы:
1) сделать заготовки уравновешивающих грузов по образцу грузов заводского исполнения;
2) снять торцовые крышки со статора генератора или люки у цилиндров турбины (см. приложение 4);
3) выбрать на роторе две балансировочные плоскости для установки уравновешивающих грузов (обычно балансировочные плоскости заданы конструкцией ротора). Осмотреть и подготовить места, предназначенные для крепления уравновешивающих грузов в каждой из балансировочных плоскостей ротора (пазы, отверстия и т.д.);
4) произвести разметку балансировочных плоскостей. Окружности установки грузов делятся на равные части и размечаются через 15-30° в направлении, противоположном направлению вращения ротора. Разметка обеих балансировочных плоскостей ротора должна совпадать. При разбивке окружности на равные части должны быть использованы конструктивные элементы ротора.
Начальный радиус, относительно которого будет производиться отсчет углов установки грузов на роторе, наносится в направлении большого зуба и маркируется цифрой "нуль";
5) определить по чертежу величину радиусов балансировочных окружностей и расстояния от внешних сторон вкладыша до балансировочных плоскостей. Уточнить общую длину ротора и его вес;
6) при большом числе рассредоточенных балансировочных грузов произвести их графическое сложение и заменить одним грузом;
7) выбрать места измерений колебаний подшипников и вращающегося ротора на выходе из подшипников и на консоли, для чего могут быть использованы участки, имеющие биение не более 0,03 мм.
Подготовка балансировочной аппаратуры заключается в установке измерительных приборов, креплении вибродатчиков и установке фазоизмерительных устройств.
Измерительные приборы устанавливаются на столе, который следует расположить на прочном основании вблизи балансируемого ротора. К столу подводится электропитание и заземление. Стационарные вибродатчики крепятся на верхние крышки всех опорных подшипников турбоагрегата; для обеспечения измерений относительно фаз вибрации датчики одних и тех же составляющих должны иметь одинаковую фазировку.
При измерении вибрации ручным вибродатчиком следует наметить точки установки штыря датчика на крышках подшипников, которые впоследствии не должны меняться; выбранные точки измерений должны обеспечить правильное положение вибродатчика относительно оси агрегата (наклон), а также одинаковую ориентацию вибродатчика при измерениях одних и тех же компонентов вибрации (для правильности измерения фазы).
При измерении фазы методом "сельсина" изготовляется и устанавливается стойка для крепления сельсина. Ротор сельсина соединяется с ротором турбоагрегата при помощи гибкой связи (гл.III).
В случае использования статора генератора в качестве фазового датчика (сельсина) три фазы статора после трансформаторов напряжения щитового ваттметра подводятся к приборному столу.
При измерении фазы вибрации методом "стробоскопа" круговой лимб, укрепленный на статоре генератора, должен иметь градусную разбивку с делениями в направлении вращения ротора. Положение радиальной черты, от которой ведется отсчет углов, должно соответствовать начальному радиусу разметки балансировочных окружностей;
8) подготовить журналы и балансировочные карты для записи результатов измерений и расчетов, выполняемых в процессе уравновешивания ротора.
2. УРАВНОВЕШИВАНИЕ РОТОРОВ ТУРБОГЕНЕРАТОРОВ
НА ЗАВОДЕ-ИЗГОТОВИТЕЛЕ
Уравновешивание роторов турбогенераторов на заводе-изготовителе имеет две основные особенности: возможность установки груза на бочку на любом этапе уравновешивания и полная симметрия опорных условий.
Ниже описывается типовой процесс уравновешивания роторов после изготовления, который состоит из статической балансировки на параллелях и динамической балансировки в собственных подшипниках. Отдельно рассмотрены особенности технологического процесса уравновешивания на различных заводах, связанные со спецификой производства и оборудования. Пример заводской балансировки дан в приложении 5 п.1.
а) Статическая балансировка
Полностью готовый ротор проходит статическую балансировку на параллелях (рис.34). Поскольку статический небаланс, накапливающийся в процессе изготовления, является в роторе превалирующим, проведение статической балансировки позволяет в дальнейшем (при динамической балансировке) существенно облегчить уравновешивание ротора при первой критической скорости.
Рис.34. Ротор турбогенератора на параллелях для статической балансировки
Для определения величины статического небаланса производят две самоустановки ротора на параллелях: с исходным небалансом и с пробным грузом. На основании смещения угла "легкого места" рассчитывается уравновешивающий груз. Это позволяет проводить статическую балансировку с большей точностью независимо от навыка оператора.
Расчетная формула имеет вид:
![]() , (27)
, (27)
где ![]() - уравновешивающий груз, кг;
- уравновешивающий груз, кг;
![]() - угол "легкого места" при первой самоустановке, град;
- угол "легкого места" при первой самоустановке, град;
![]() - угол "легкого места" при второй самоустановке с пробным грузом, град;
- угол "легкого места" при второй самоустановке с пробным грузом, град;
![]() - пробный груз, который устанавливается на ротор на угол (
- пробный груз, который устанавливается на ротор на угол (![]() ±90°), кг.
±90°), кг.
Углы ![]() и
и ![]() отсчитываются от начального радиуса;
отсчитываются от начального радиуса; ![]() выбирается в пределах 5-7 кг; разность углов
выбирается в пределах 5-7 кг; разность углов ![]() берется положительной.
берется положительной.
Найденный ![]() соответствует смещению центра тяжести ротора от суммарного воздействия всех симметричных форм неуравновешенности, однако без большой погрешности можно считать, что он целиком соответствует первой форме небаланса. Это предположение хорошо согласуется с представлением от образовании небаланса на роторе в процессе его изготовления: неидентичность допусков при фрезеровании пазов, разница в весах катушек, остаточный прогиб ротора и другие причины способствуют в основном образованию первой формы неуравновешенности, тогда как появление существенных составляющих третьей и более высоких симметричных форм при этом представляется маловероятным. Анализ расположения уравновешивающих грузов, установленных на большом числе отбалансированных роторов, подтверждает это предположение.
соответствует смещению центра тяжести ротора от суммарного воздействия всех симметричных форм неуравновешенности, однако без большой погрешности можно считать, что он целиком соответствует первой форме небаланса. Это предположение хорошо согласуется с представлением от образовании небаланса на роторе в процессе его изготовления: неидентичность допусков при фрезеровании пазов, разница в весах катушек, остаточный прогиб ротора и другие причины способствуют в основном образованию первой формы неуравновешенности, тогда как появление существенных составляющих третьей и более высоких симметричных форм при этом представляется маловероятным. Анализ расположения уравновешивающих грузов, установленных на большом числе отбалансированных роторов, подтверждает это предположение.
Как указывалось в разделе 2 гл.I, для достижения безвибрационной работы ротора турбогенератора достаточно провести уравновешивание по первым трем формам колебаний, поэтому найденный ![]() следует выставить на ротор ортогонально третьей форме прогиба, чтобы не вызвать по ней приращения вибраций на рабочей скорости. Это особенно важно вследствие значительных величин статического небаланса, достигающих подчас 15-20 кг для роторов весом 30-50 т.
следует выставить на ротор ортогонально третьей форме прогиба, чтобы не вызвать по ней приращения вибраций на рабочей скорости. Это особенно важно вследствие значительных величин статического небаланса, достигающих подчас 15-20 кг для роторов весом 30-50 т.
Поскольку расстановка грузов вдоль ротора в точном соответствии с ![]() (см. рис.7) не представляется возможной (нельзя ставить грузы на бандажные кольца, шейки ротора и т.п.), требованию ортогональности проще всего удовлетворить, устанавливая найденный груз в плоскости узлов третьей формы прогиба или распределяя его вдоль бочки симметрично относительно узлов третьей формы (рис.35,
(см. рис.7) не представляется возможной (нельзя ставить грузы на бандажные кольца, шейки ротора и т.п.), требованию ортогональности проще всего удовлетворить, устанавливая найденный груз в плоскости узлов третьей формы прогиба или распределяя его вдоль бочки симметрично относительно узлов третьей формы (рис.35, ![]() и б). Такая расстановка грузов особо важна для роторов, у которых
и б). Такая расстановка грузов особо важна для роторов, у которых ![]() , т.е. для самых крупных (по геометрическим размерам) турбогенераторов типов ТВВ-500-2, ТВВ-320-2, ТВФ-200-2, ТВ2-150-2.
, т.е. для самых крупных (по геометрическим размерам) турбогенераторов типов ТВВ-500-2, ТВВ-320-2, ТВФ-200-2, ТВ2-150-2.
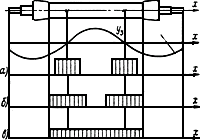
Рис.35. Распределение уравновешивающих грузов после статической балансировки:![]() и б - симметричное относительно узлов третьей формы
и б - симметричное относительно узлов третьей формы ![]()
для роторов с ![]() ; в - равномерное для роторов с
; в - равномерное для роторов с ![]()
Перенос уравновешивающих грузов и распределение их вдоль длины ротора специально рассматриваются в приложении 3.
Из рассмотрения форм свободных колебаний (приложение 1) следует, что в условиях электростации для роторов всех перечисленных типов расстояние от края бочки ротора до узлов третьей формы прогиба составляет 0,18-0,21 от всей длины бочки. Принимая это расстояние равным 0,2, получаем, что в середине бочки имеется зона, равная 20% длины, куда не следует устанавливать грузы, компенсирующие статический небаланс, чтобы не возбудить колебания третьей формы на рабочей скорости вращения.
Для роторов с ![]() влияние третьей формы на рабочей скорости незначительно и для них можно допускать равномерное распределение уравновешивающего статического груза вдоль бочки ротора (рис.35, в).
влияние третьей формы на рабочей скорости незначительно и для них можно допускать равномерное распределение уравновешивающего статического груза вдоль бочки ротора (рис.35, в).
Грузы на бочке ротора (пробки) устанавливаются в резьбовые отверстия на пазовых клиньях для роторов серии ТВ2 и на большом зубе - для роторов серии ТВВ. Чтобы избежать появления несимметрии охлаждения ротора, в отверстия, диаметрально противоположные пробкам, устанавливаются дюралюминиевые заглушки. Конструкции пробок и заглушек приведены в приложении 4.
В случае, когда небаланс оказывается столь большим, что его не удается скомпенсировать пробками, излишек удаляется путем сверления дополнительных отверстий в большом зубе.
На этом процесс статической балансировки заканчивается. Пример ее конкретного осуществления приведен в приложении 5. Хорошее состояние поверхностей параллелей обеспечивает точность статической балансировки не менее 1 кг остаточного небаланса для ротора весом в 50 т. Для меньших по весу роторов достигается более высокая точность.
б) Динамическая балансировка
Для проведения динамической балансировки ротор собирают в специальном разгонно-балансировочном сооружении (РБС) на двух одинаковых технологических подшипниках. Плавный набор скорости вращения осуществляется асинхронным двигателем мощностью 2-3 тыс. кВт по схеме частотного пуска.
РБС выполняется либо по типу ямы (рис.36), в которую ротор опускают, собирают там и закрывают сверху защитной плитой, либо по типу блиндажа, в который предварительно собранный ротор закатывают на самоходных тележках с установленными на них подшипниками (рис.37). РБС представляет собой большое строительное сооружение, призванное локализировать энергию возможной аварии ротора при испытании его на угонную скорость вращения.
Рис.37. Разгонно-балансировочное сооружение типа "блиндаж"
Процесс динамического уравновешивания осуществляется на критических скоростях вращения, лежащих ниже рабочей скорости, и на рабочей скорости вращения. Полная симметрия ротора и равенство подавливостей обеих опор, а также возможность устанавливать грузы по длине ротора позволяют в условиях завода устранять вибрацию подшипников (концов вала), вызванную одной из форм колебаний, практически не вызывая изменения вибрации по другим формам.
На каждом пуске производятся обязательные измерения амплитуд и фаз вибрации на балансировочной скорости и критических скоростях, а также на ряде промежуточных скоростей. Одинаковая скорость разгона ротора при различных пусках, обеспечиваемая электродвигателем, и стационарное закрепление датчиков на опорах позволяют измерения вибрации на критических скоростях производить при их проходе, беря отсчеты по максимуму. В процессе балансировки двойная амплитуда любой составляющей вибраций подшипников не должна превышать 150-200 мк.
Балансировку начинают с проверки вибрации на первой критической скорости. По нормам завода "Электросила" она не должна превышать 50 мк. Как правило, после статической балансировки на параллелях вибрация опор на первой критической скорости в РБС никогда не превышает 10-20 мк и уравновешивание по первой форме проводить практически не приходится. В противном случае на ротор устанавливается пробная симметричная система грузов и с ней производится следующий пуск. Величина и место установки пробного груза определяются по чувствительности (табл.2). Расчет уравновешивающего груза производится по симметричным составляющим вибрации, измеренной на первой критической скорости. Для упрощения операций по установке грузов пробный груз ставится в торцовые пазы центрирующих колец (заточки), а рассчитанный уравновешивающий груз распределяется вдоль бочки ротора по тем же правилам, что и при статической балансировке.
Таблица 2
Балансировочная чувствительность при уравновешивании роторов турбогенераторов
в РБС различными системами грузов
|
Тип турбогенератора |
Первая критическая скорость |
Рабочая скорость | |||
|
Полусумма вертикальной вибрации к грузу в середине длины бочки, мк/кг |
Полуразность вертикальной вибрации к кососимметричному грузу, мк/кг |
Полусумма вертикальной вибрации к |
Полусумма горизонтальной вибрации к грузу на консоли, мк/кг | ||
|
ТВФ-100-2 |
|
8-15 |
35 |
- |
60 |
При переносе груз пересчитывается так, как это показано в приложении 3.
Далее проводится уравновешивание по второй форме колебаний на второй критической скорости или на рабочей скорости вращения. Последовательность операций остается той же: производится пуск с пробной кососимметричной системой грузов, и по приращению противофазных составляющих вибрации рассчитываются уравновешивающие грузы. Как пробная, так и уравновешивающая системы грузов устанавливаются в заточку центрирующих колец.
У роторов турбогенераторов ТВВ-320-2 и ТВВ-500-2 кососимметричную систему грузов, если ее величина превышает 2 кг на сторону, переносят на бочку. Необходимость в этом возникает вследствие того, что для роторов с ![]() имеет место влияние динамического прогиба по четвертой форме свободных колебаний при рабочей скорости вращения, ввиду чего кососимметричная система грузов, установленная в торцы ротора и уравновешивающая его на второй критической скорости, вызывает появление противофазных составляющих вибраций на рабочей скорости. При переносе на бочку кососимметричные грузы устанавливаются в узлы четвертой формы, пересчет осуществляется по формулам приложения 3.
имеет место влияние динамического прогиба по четвертой форме свободных колебаний при рабочей скорости вращения, ввиду чего кососимметричная система грузов, установленная в торцы ротора и уравновешивающая его на второй критической скорости, вызывает появление противофазных составляющих вибраций на рабочей скорости. При переносе на бочку кососимметричные грузы устанавливаются в узлы четвертой формы, пересчет осуществляется по формулам приложения 3.
Установкой уравновешивающей системы кососимметричных грузов обычно заканчивается процесс балансировки генераторов, у которых ![]() . Для машин с
. Для машин с ![]() балансировки по двум формам оказывается недостаточно, и вибрация опор на рабочей скорости может иметь значительную синфазную составляющую. В этом случае приходится продолжить балансировку по третьей форме колебаний. Пробная и уравновешивающая системы грузов устанавливаются в одной радиальной плоскости по V-образной системе, т.е. один груз в середину бочки ротора и два таких же груза на диаметрально противоположный угол в торцовые заточки. Эта система грузов является ортогональной к первой форме прогиба и потому не меняет состояния уравновешенности на первой критической скорости. Расчеты производятся по полусуммам вибраций подшипников на рабочей скорости.
балансировки по двум формам оказывается недостаточно, и вибрация опор на рабочей скорости может иметь значительную синфазную составляющую. В этом случае приходится продолжить балансировку по третьей форме колебаний. Пробная и уравновешивающая системы грузов устанавливаются в одной радиальной плоскости по V-образной системе, т.е. один груз в середину бочки ротора и два таких же груза на диаметрально противоположный угол в торцовые заточки. Эта система грузов является ортогональной к первой форме прогиба и потому не меняет состояния уравновешенности на первой критической скорости. Расчеты производятся по полусуммам вибраций подшипников на рабочей скорости.
На этом процесс динамической балансировки заканчивается.
После балансировки ротор нагревают и подвергают разгону - испытанию на повышенную скорость вращения ![]() в течение 2 мин.
в течение 2 мин.
В процессе балансировки параллельно с расчетами уравновешивающих грузов весьма полезно производить расчет балансировочных чувствительностей по формуле (24). Особенно важны фазы чувствительностей, поскольку, будучи вычтенными из исходной вибрации, они дают положение небаланса на роторе. Если фазовая поправка на аппаратуру не зависит от скорости вращения, то фаза вектора чувствительности меняется в зоне критических скоростей в соответствии с рис.33 и одинакова для любой формы небаланса при одинаковом соотношении балансировочных и критических скоростей.
Так, например, для ротора турбогенератора ТВВ-320-2 ![]() 900 об/мин,
900 об/мин, ![]() 2700 об/мин, и
2700 об/мин, и ![]() 5400 об/мин. Для этого ротора при компенсации небаланса, распределенного по первом форме неуравновешенности, на первой критической скорости фаза вектора чувствительности
5400 об/мин. Для этого ротора при компенсации небаланса, распределенного по первом форме неуравновешенности, на первой критической скорости фаза вектора чувствительности ![]() будет той же, что и при балансировке по второй форме на второй критической скорости. В то же время при балансировке по второй и третьей формам, выполняемой на рабочей скорости, фазы балансировочных чувствительностей будут отличаться на угол приблизительно 180°, поскольку для второй формы рабочая скорость находится за второй критической скоростью, а для третьей - перед ней.
будет той же, что и при балансировке по второй форме на второй критической скорости. В то же время при балансировке по второй и третьей формам, выполняемой на рабочей скорости, фазы балансировочных чувствительностей будут отличаться на угол приблизительно 180°, поскольку для второй формы рабочая скорость находится за второй критической скоростью, а для третьей - перед ней.
Расчет ![]() в процессе уравновешивания позволяет перейти к балансировке по последующей форме, опираясь на данные уравновешивания по предыдущей, что дает возможность производить установку пробного груза таким образом, чтобы уже на втором пуске получить уменьшение вибрации опор.
в процессе уравновешивания позволяет перейти к балансировке по последующей форме, опираясь на данные уравновешивания по предыдущей, что дает возможность производить установку пробного груза таким образом, чтобы уже на втором пуске получить уменьшение вибрации опор.
При наличии достаточного опыта и квалификации персонала можно производить уравновешивание одновременно по двум и даже трем формам свободных колебаний.
Как известно, суммарная податливость опор и масляной пленки в вертикальном направлении ниже, чем в горизонтальном. Поэтому, если для вертикального направления у современных турбогенераторов большой мощности наиболее близкой к рабочей оказывается вторая критическая скорость, то для горизонтального направления то же можно сказать уже про третью критическую скорость. Исходя из этого можно, например, установить на ротор сразу три ортогональные друг другу системы пробных грузов: симметричную - в узлы третьей формы, согласно рис.35, ![]() , кососимметричную - в заточку центрирующих колец и V-образную с использованием трех плоскостей ротора (торцовая заточка - середина бочки - торцовая заточка). Пуск ротора с этими грузами позволит рассчитать уравновешивающие системы:
, кососимметричную - в заточку центрирующих колец и V-образную с использованием трех плоскостей ротора (торцовая заточка - середина бочки - торцовая заточка). Пуск ротора с этими грузами позволит рассчитать уравновешивающие системы:
по первой форме - по приращению полусуммы вертикальной вибрации на первой критической скорости;
по второй форме - по приращению полуразности вертикальной вибрации на рабочей скорости;
по третьей форме - по приращению полусуммы горизонтальной вибрации на рабочей скорости.
Указанное распределение критических скоростей позволяет утверждать, что все три приращения вибрации являются практически взаимонезависимыми. Это и дает возможность произвести одновременное уравновешивание по трем формам колебаний.
Разумеется, подобная балансировка ротора сразу по нескольким формам колебаний ведет к увеличению погрешностей в определении уравновешивающих грузов и требует высокой квалификации балансировщика. Поскольку задачей балансировки является снижение вибрации опор ротора до нормы, а не до нулевого значения, уравновешивание одновременно несколькими системами грузов может дать положительный эффект. Такое уравновешивание позволяет сократить цикл балансировки ротора на 3-4 пуска.
В практике уравновешивания роторов на испытательном стенде в собранном виде, когда нет доступа к бочке, широкое применение находит использование консольных участков для установки балансировочных грузов. Так, чувствительность синфазных составляющих вибрации опор на рабочей скорости к грузу на консольных участках в 7-10 раз выше, чем при установке симметричной системы.
Для установки грузов на консольных участках теперь специально предусмотрены: со стороны турбины - резьбовые отверстия на полумуфте, со стороны возбудителя - насадной диск за контактными кольцами.
в) Особенности технологического процесса уравновешивания на различных заводах
Основные особенности следующие:
1. Статической балансировке подвергается не готовый ротор, а поковка после механической обработки. Ее статический небаланс стараются скомпенсировать в процессе укладки обмотки в пазы, используя разницу веса предварительно взвешенных полукатушек. Эта операция позволяет уменьшить количество уравновешивающих грузов, выставляемых на ротор.
2. Полностью готовый ротор балансируется на балансировочном станке при скорости вращения 300-400 об/мин, чем достигается компенсация суммарного воздействия всех нечетных и четных форм неуравновешенности (статического и динамического небалансов).
Однако формы колебаний ротора при установке на балансировочном станке и в собственных подшипниках не совпадают (рис.38). Поэтому уравновешивание на станке не избавляет от балансировки в собственных подшипниках, но может облегчить ее, частично компенсируя грубый небаланс ротора.
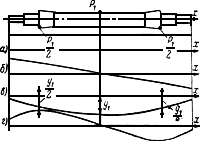
3. БАЛАНСИРОВКА В УСЛОВИЯХ ЭЛЕКТРОСТАНЦИЙ
а) Первый пуск
Операции, связанные с первым пуском агрегата, являются наиболее ответственными: от тщательности их проведения во многом зависит успех всей балансировки.
Во время первого пуска надлежит:
а) определить векторы колебаний подшипников (концов вала) под влиянием неуравновешенности - на рабочей скорости и вблизи критических скоростей;
б) сделать предварительную оценку характера распределения неуравновешенности, на основании чего выбрать систему пробных грузов, используемых при первом цикле балансировки;
в) определить плоскости установки грузов.
Полученные величины векторов колебаний опор (концов вала) позволяют судить о неуравновешенности ротора.
Предварительная оценка вида неуравновешенности и ее распределения вдоль оси ротора производится на основании анализа скоростной характеристики колебаний опор (концов вала), полученной при виброобследовании или во время начального пуска агрегата (гл.II).
Оценка характера неуравновешенности симметричного ротора в случае относительно одинаковой податливости опор может быть также приближенно произведена на основании результатов графического разложения векторов колебаний концов вала или подшипниковых опор (обычно используются вертикальные составляющие, ибо в этом направлении жесткости опор более сопоставимы) на симметричные и кососимметричные составляющие и сравнения величин последних.
Если ![]() и
и ![]() - векторы соответствующих компонентов вибраций опор (вала) балансируемого ротора при начальном пуске, то симметричные
- векторы соответствующих компонентов вибраций опор (вала) балансируемого ротора при начальном пуске, то симметричные ![]() ,
, ![]() и кососимметричные
и кососимметричные ![]() ,
, ![]() составляющие определяются как полусумма или полуразность этих векторов (рис.39,
составляющие определяются как полусумма или полуразность этих векторов (рис.39, ![]() ):
):
![]() ;
; ![]() .
.
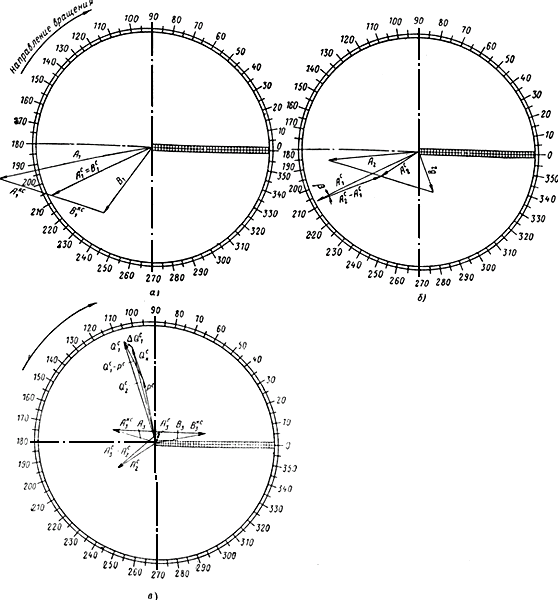
Рис.39. Графические построения при балансировке ротора с произвольным
расположением неуравновешенности:![]() - пуск I; б - пуск II; в - пуск III
- пуск I; б - пуск II; в - пуск III
Если в результате анализа установлено, что основной составляющей небаланса является кососимметричная форма, то уравновешивание ротора производится на рабочей скорости.
Если основной составляющей небаланса будет симметричная форма, то в зависимости от характера распределения неуравновешенности вдоль ротора возможны два случая:
а) основной небаланс соответствующей величины расположен таким образом, что при проходе первой критической скорости ротором генератора амплитуды вибрации его опор не превышают 200 мк, при проходе второй критической скорости - 100 мк, а при проходе первой критической скорости ротором турбины - 150 мк;
б) основной небаланс расположен таким образом, что при проходе первой критической скорости амплитуды вибрации опор превышают указанные выше (в п.а) значения.
В первом случае, так же как и в случае балансировки кососимметричной системой, уравновешивание проводится на рабочей скорости вращения; во втором случае уравновешиванию на рабочей скорости должно предшествовать уравновешивание вблизи первой критической скорости.
Установка пробных грузов производится по известным коэффициентам чувствительности (векторам) опор к системе пробных грузов для данного типа машин (приложение 2) или приближенно (путем определения плоскостей составляющих форм упругого прогиба).
В последнем случае при прохождении первой критической скорости определяется расположение небаланса, вызывающего упругий прогиб ротора по первой форме свободных колебаний.
Для определения плоскости первой формы неуравновешенности необходимо знать:
а) место максимального биения ротора ("бьющую" точку);
б) сдвиг фаз между направлением действия небаланса и "бьющей" точкой.
При определении "бьющей" точки следует учитывать ориентацию вибродатчика, место его установки по отношению к подшипниковой опоре и величину дополнительного фазового сдвига, получающегося от самой аппаратуры (гл.III).
"Бьющая" точка определяется по вибрации каждой стороны ротора в момент прохождения им критической скорости, а также на рабочей скорости. Поскольку упругая линия вала в момент прохождения первой критической скорости лежит в одной плоскости, "бьющие" точки обоих концов вала будут также находиться в одной плоскости.
Угол сдвига фазы небаланса на первой критической скорости близок к 90°; поэтому, отложив его от "бьющей" точки по направлению вращения ротора, можно найти искомую плоскость расположения симметричной составляющей неуравновешенности и, следовательно, место установки системы симметричных пробных грузов.
Положение плоскости кососимметричных составляющих неуравновешенности приближенно определяется аналогичным образом на второй критической или на рабочей скорости вращения. Кроме того, искомые плоскости могут быть определены из анализа скоростных характеристик (гл.II).
б) Уравновешивание на рабочей скорости вращения
Выбор пробных грузов. Методика уравновешивания предусматривает использование систем симметричных и кососимметричных грузов, устанавливаемых в балансировочные плоскости ротора (гл.I).
Выбор системы пробных грузов производится в соответствии с доминирующей формой распределения неуравновешенности вдоль ротора: симметричные грузы выбираются, если неуравновешенность в основном соответствует симметричному распределению, а кососимметричные грузы - если неуравновешенность соответствует кососимметричному распределению небаланса.
Вес пробных грузов определяется в зависимости от предполагаемых величин симметричных ![]() и кососимметричных
и кососимметричных ![]() уравновешивающих грузов, оцениваемых на основании средних значений коэффициентов чувствительности опор к системе симметричных или кососимметричных грузов
уравновешивающих грузов, оцениваемых на основании средних значений коэффициентов чувствительности опор к системе симметричных или кососимметричных грузов ![]() ,
, ![]() , устанавливаемых в балансировочных плоскостях (приложение 2):
, устанавливаемых в балансировочных плоскостях (приложение 2):
![]() ;
; ![]() .
.
Величина пробных грузов должна составлять около 70% величины предполагаемых уравновешивающих грузов
![]() ; (28)
; (28)
![]() . (29)
. (29)
В случае небольших значений начальной вибрации (максимальные величины размаха вибросмещений не превышают 70 мк) пробные грузы выбираются равными величине предполагаемого небаланса.
При установке грузов, на разном расстоянии от оси вращения их величины корректируются пропорционально радиусу установки, исходя из условия
![]() , (30)
, (30)
где ![]() и
и ![]() - радиусы установки пробных грузов.
- радиусы установки пробных грузов.
При уравновешивании роторов турбоагрегатов, коэффициенты чувствительности для которых не указаны в приложении 2, используются коэффициенты чувствительности роторов, близких по конструкции (примерно с одинаковыми значениями критических скоростей, веса, длины).
Пуск с пробными грузами и подсчет уравновешивающих грузов. Подсчитанные по формулам (28) и (29) симметричные или кососимметричные пробные грузы устанавливаются на ротор, производится пуск турбоагрегата и по достижении рабочей скорости вращения измеряются величины амплитуд и фаз вибраций подшипниковых опор - векторы вибраций ![]() и
и ![]() . В процессе пуска обязательно проводятся измерения вибраций на всех критических скоростях, лежащих ниже рабочей.
. В процессе пуска обязательно проводятся измерения вибраций на всех критических скоростях, лежащих ниже рабочей.
Если пуск производился с системой симметричных пробных грузов, то выделяются полученные при этом пуске симметричные составляющие вибрации
![]()
и определяются векторы влияния от установленных симметричных грузов
![]() и
и ![]() .
.
Величина каждого из грузов, компенсирующих симметричные составляющие небаланса, определится из выражения
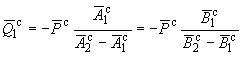 . (31)
. (31)
Сложение и вычитание векторов производятся графически, а умножение и деление - аналитически.
Угол установки симметричных грузов определяется по отношению к углу установки пробных грузов из векторного треугольника. Так, из рис.39, б видно, что для сведения к нулю первоначальной симмеричной составляющей вибрации ![]() необходимо вектор пробного груза
необходимо вектор пробного груза ![]() повернуть на угол
повернуть на угол ![]() против направления вращения ротора и увеличить его в отношении
против направления вращения ротора и увеличить его в отношении
 .
.
Пуск с уравновешивающими грузами и корректировка результатов. Подсчитанные по формуле (31) грузы, уравновешивающие симметричные составляющие небаланса, устанавливаются на ротор, производится пуск турбоагрегата, и по достижении рабочей скорости вращения измеряются новые величины амплитуд и фаз вибрации подшипников - векторы ![]() и
и ![]() . Измеряется вибрация также на критических скоростях.
. Измеряется вибрация также на критических скоростях.
Путем повторного графического разложения полученных векторов выделяются симметричные составляющие вибрации
![]() ,
,
а также кососимметричные составляющие (рис.39, в)
![]() .
.
Если полученные симметричные составляющие вибрации ![]() имеют двойную амплитуду, не превышающую 15-20 мк, то на этом первый этап по компенсации симметричных составляющих небаланса заканчивается и переходят ко второму этапу - компенсации кососимметричных составляющих.
имеют двойную амплитуду, не превышающую 15-20 мк, то на этом первый этап по компенсации симметричных составляющих небаланса заканчивается и переходят ко второму этапу - компенсации кососимметричных составляющих.
Если величины симметричных составляющих вибрации имеют более высокое значение, то производится корректировка уравновешивающих грузов.
Учитывая возможность нелинейных соотношений, при этих подсчетах за начальный принимается пуск с системой пробных грузов 2![]() , если указанный пуск был эффективным в части снижения вибрации. При подсчетах корректирующего груза в формулы вместо пробного груза надо подставить значение векторной разности грузов
, если указанный пуск был эффективным в части снижения вибрации. При подсчетах корректирующего груза в формулы вместо пробного груза надо подставить значение векторной разности грузов ![]() . Векторы вибрации от этих пробных грузов будут
. Векторы вибрации от этих пробных грузов будут
![]() и
и ![]() .
.
Величина каждого груза ![]() для корректировки уравновешивающих симметричных грузов
для корректировки уравновешивающих симметричных грузов
 . (32)
. (32)
Угол установки корректирующих грузов определяется по отношению к углу вектора разности грузов ![]() (рис.39, в).
(рис.39, в).
После подсчета корректирующих грузов графически определяется уточненное значение уравновешивающих грузов 2![]()
![]() . (33)
. (33)
В том случае, когда грузы 2![]() не намного отличаются от грузов 2
не намного отличаются от грузов 2![]() , установленных на роторе, грузы 2
, установленных на роторе, грузы 2![]() снимать с ротора не целесообразно. К ним следует лишь добавить два симметричных малых груза 2
снимать с ротора не целесообразно. К ним следует лишь добавить два симметричных малых груза 2![]() , определенных графически как разность грузов
, определенных графически как разность грузов
![]() . (34)
. (34)
В случае необходимости корректировка грузов может быть продолжена описанным способом.
Критерием эффективности компенсации симметричных составляющих неуравновешенности является приведение векторов колебаний подшипников в одну плоскость с приданием этим векторам диаметрально противоположного направления (получение кососимметричного характера векторов вибрации).
В результате балансировки симметричными грузами на рабочей скорости вибрация подшипников (концов вала) на первой критической скорости не должна превышать 100 мк. В противном случае порядок балансировки изменяется (см. ниже).
Компенсация кососимметричных составляющих небаланса. Компенсация кососимметричных составляющих небаланса проводится в двух случаях:
1) если кососимметричные составляющие небаланса являются основной формой распределения небаланса;
2) если в результате компенсации симметричных составляющих небаланса необходимого снижения уровня вибраций агрегата не достигнуто.
В первом случае порядок операций и подсчетов аналогичен изложенному выше для случая компенсации симметричной неуравновешенности.
Подсчитанные по формуле (29) пробные грузы ![]() и
и ![]() устанавливаются на торцах ротора, и производится пробный пуск.
устанавливаются на торцах ротора, и производится пробный пуск.
Далее путем графического разложения полученных при пуске с пробными грузами векторов вибраций ![]() и
и ![]() выделяются кососимметричные составляющие вибраций
выделяются кососимметричные составляющие вибраций
![]()
и определяются векторы влияний от установленных кососимметричных грузов
![]() и
и ![]() .
.
Величина каждого из пары грузов, уравновешивающих кососимметричные составляющие небаланса, определится аналогично выражению (31)
 . (35)
. (35)
После пуска с системой кососимметричных уравновешивающих грузов ![]() и
и ![]() путем графического разложения измеренных векторов вибрации
путем графического разложения измеренных векторов вибрации ![]() и
и ![]() выделяются кососимметричные
выделяются кососимметричные ![]() и симметричные
и симметричные ![]() составляющие вибрации.
составляющие вибрации.
На основании полученных результатов делается заключение о целесообразности перехода к компенсации симметричных составляющих неуравновешенности или проведения дополнительного пуска с корректировкой полученных результатов в соответствии с изложенной выше методикой. При этом используются выражения (32)-(34), где симметричные системы грузов и симметричные составляющие вибрации заменяются кососимметричными системами грузов и соответствующими кососимметричными составляющими вибрации.
Если компенсация кососимметричных составляющих неуравновешенности производится после устранения симметричных составляющих, то в качестве начальных используются векторы вибрации, полученные при последнем пуске с уравновешивающими симметричными грузами.
Если симметричные составляющие вибрации предварительно практически устранены, т.е. ![]() , можно без большой погрешности считать оставшуюся вибрацию чисто кососимметричной.
, можно без большой погрешности считать оставшуюся вибрацию чисто кососимметричной.
Вследствие этого графическое выделение кососимметричных составляющих вибрации в данном случае не потребуется, а величина уравновешивающих кососимметричных грузов определится из выражения
 . (36)
. (36)
Порядок подсчета корректирующих грузов аналогичен описанному выше.
По окончании уравновешивания ротора установленные в данной балансировочной плоскости грузы, входящие в симметричную и кососимметричную системы, графически складываются и заменяются одним грузом.
Уравновешивание роторов, рабочая скорость которых лежит ниже первой критической скорости, является частным случаем описанной выше балансировки на рабочей скорости; отличие заключается только в том, что для этой категории роторов дополнительного уравновешивания вблизи критической скорости не потребуется.
в) Уравновешивание вблизи первой критической скорости ротора
Выше отмечалось, что в случае чрезмерных значений вибрации на первой критической скорости возникает необходимость уменьшения упругого прогиба ротора при проходе критической скорости путем его предварительного уравновешивания на этой скорости.
Особым случаем является также существенная разбалансировка ротора на первой критической скорости после уравновешивания ротора на рабочей скорости.
Следует иметь в виду, что уравновешивающие грузы, установленные в торцовые плоскости ротора для устранения вибрации на первой критической скорости, в ряде случаев будут разбалансировывать ротор на рабочей скорости, вследствие чего операция по балансировке вблизи критической скорости потребует выемки ротора из машины с последующим размещением уравновешивающих грузов на бочке ротора. Поэтому этот вид балансировки следует применять в том случае, если после уравновешивания на рабочей скорости колебания подшипников при проходе первой критической скорости превышают 100 мк.
За исходные данные берутся максимальные значения амплитуд вибрации (и их фазы), полученные во время начального пуска при проходе критической скорости. Если уровень вибрации слишком велик (свыше 200 мк), то измерения производятся при скорости вращения ротора на 150-200 об/мин ниже критической скорости. Следует подчеркнуть, что работа в резонансном, режиме требует проведения измерений строго на одной и той же скорости вращения агрегата.
Уравновешивание производится при помощи системы симметричных грузов, устанавливаемых в балансировочные плоскости ротора.
Пробные симметричные грузы определяются из выражения (28), где используются средние коэффициенты чувствительности опор к системе симметричных грузов для первой критической скорости ротора (приложение 2).
Порядок операций при уравновешивании системой симметричных грузов сохраняется таким же, как и при балансировке на рабочей скорости, однако ротор разгоняется только до первой критической скорости.
Векторы вибрации опор ![]() и
и ![]() , полученные при измерениях вблизи первой критической скорости, при изотропных опорах должны лежать в одной плоскости и возбуждаться первой симметричной формой неуравновешенности. Система симметричных пробных грузов, установленная на роторе, в этом случае также будет примерно одинаково воздействовать на обе опоры. Поэтому, если векторы вибрации от пробных грузов различаются по величине не более чем на 20%, а по фазе не более чем на 15°, то балансировочные расчеты можно производить по среднеарифметическим значениям амплитуд и фаз вибрации.
, полученные при измерениях вблизи первой критической скорости, при изотропных опорах должны лежать в одной плоскости и возбуждаться первой симметричной формой неуравновешенности. Система симметричных пробных грузов, установленная на роторе, в этом случае также будет примерно одинаково воздействовать на обе опоры. Поэтому, если векторы вибрации от пробных грузов различаются по величине не более чем на 20%, а по фазе не более чем на 15°, то балансировочные расчеты можно производить по среднеарифметическим значениям амплитуд и фаз вибрации.
Если векторы начальной вибрации опор ![]() и
и ![]() , а векторы вибрации при пуске с пробными грузами
, а векторы вибрации при пуске с пробными грузами ![]() и
и ![]() , то векторы вибрации от пробных грузов будут
, то векторы вибрации от пробных грузов будут
![]() и
и ![]() ,
,
а расчетные значения уравновешивающих грузов
 ;
;  .
.
На ротор устанавливаются два равных симметричных уравновешивающих груза, вес каждого
![]() ,
,
а фазовый угол
![]() .
.
Угол установки уравновешивающих грузов отсчитывается от положения пробных грузов, как указывалось выше.
Операция по уравновешиванию вблизи первой критической скорости считается законченной, если максимальная вибрация опор не превышает 50 мк.
Если двойная амплитуда вибрации при пуске с уравновешивающими грузами выше этого значения, то производится корректировка грузов по формуле
![]() ;
; ![]() .
.
После подсчета корректирующих грузов графически определяются уточненные значения уравновешивающих грузов 2![]() :
: ![]() , где груз
, где груз ![]() определяется как полусумма грузов
определяется как полусумма грузов ![]() и
и ![]() .
.
После окончательного определения грузов, устанавливаемых на торцах ротора и уравновешивающих его на первой критической скорости, скорость вращения ротора доводится до рабочей.
В случае, если установленные симметричные грузы вызвали повышенную симметричную вибрацию на рабочей скорости, то эти грузы переносят на бочку ротора (приложение 3).
г) Особые случаи уравновешивания роторов
Существуют определенные типы роторов (например, ротор турбогенератора ТВ-50-2) с симметричным распределением неуравновешенности, для которых рабочая скорость вращения совпадает с нечувствительной скоростью к симметричным грузам. Иными словами, установка симметричной системы пробных грузов в торцовые балансировочные плоскости не будет оказывать существенного влияния на изменение вибрации опор на рабочей скорости вращения.
В этих случаях при уравновешивании следует отказываться от торцовых балансировочных плоскостей и использовать другие плоскости установки грузов. При отсутствии таковых возникает необходимость производить установку грузов на бочке ротора, что сопряжено с выемкой ротора из статора.
Предлагается приводимая ниже последовательность балансировки:
1. Уравновешивание ротора вблизи первой критической скорости с установкой системы симметричных грузов в торцовые плоскости ротора.
2. По окончании этой операции уравновешивающие грузы распределить вдоль бочки ротора равномерно согласно правилам переноса грузов (см. приложение 4).
Дальнейшая балансировка ротора на рабочей скорости вращения производится так, как это описано выше.
д) Уравновешивание консольных участков ротора
Уравновешивание консольного конца ротора проводится при рабочей скорости вращения. Для уравновешивания используется единичный груз, помещаемый в балансировочную плоскость, расположенную непосредственно на консоли.
В случае повышения вибрации подшипников сверх нормы в результате балансировки консоли производится уравновешивание ротора по методике, изложенной выше. Если после уравновешивания колебания консоли вновь увеличились, процесс балансировки консоли следует повторить.
Вес и расположение уравновешивающих грузов определяются на основании результатов измерения вибрации консоли при пуске ротора, имеющего начальную неуравновешенность, и при пуске с установленными на консоли пробными грузами (гл.I, раздел 2). При этом контролируется также вибрация всех подшипников агрегата.
Вес пробного груза выбирается исходя из значения консольной балансировочной чувствительности ![]() . Для турбогенераторов, работающих вне области критических и нечувствительных скоростей,
. Для турбогенераторов, работающих вне области критических и нечувствительных скоростей, ![]() лежит в пределах 200-300 мк/кг. Балансировочная чувствительность консоли для турбогенераторов, работающих вблизи второй критической скорости, достигает 500-700 мк/кг.
лежит в пределах 200-300 мк/кг. Балансировочная чувствительность консоли для турбогенераторов, работающих вблизи второй критической скорости, достигает 500-700 мк/кг.
Приведенные значения отнесены к установке груза на радиусе 100 мм при отношении длины ротора между подшипниками к длине ротора с консолью, лежащем в пределах 0,8-0,9. Примеры балансировки роторов на электростанции даны в приложении 5 п.2.
ГЛАВА V
БАЛАНСИРОВКА РОТОРОВ С УЧЕТОМ ИХ ТЕПЛОВОГО ПРОГИБА
В результате исследований, предшествующих уравновешиванию (гл.II), может оказаться, что нагружение током и нагрев ротора турбогенератора приводят к нарушению его уравновешенности. Основные причины тепловой разбалансировки электрических роторов указаны выше, во введении.
Выполнение обмотки и конструкция системы охлаждения ротора должны обеспечить строгую симметрию температурного поля в каждом поперечном сечении его бочки. Несимметрия температуры по окружности ротора приводит к упругой деформации его оси и, как следствие, к нарушению уравновешенности.
Расчеты показывают, что разница между температурами двух диаметральных образующих бочки ротора турбогенератора ТВ-100-2 в 2 °С приводит к прогибу в центре со стрелой порядка 0,08-0,10 мм.
Для тяжелых роторов современных мощных турбогенераторов деформация упругой оси с прогибом в 0,1 мм эквивалентна неуравновешенности, величина которой достаточна, чтобы вызвать повышенную вибрацию подшипников ротора.
Несимметрия температуры по окружности ротора, приводящая к тепловым деформациям его оси, вызывается неисправностями двоякого рода:
1) наличием местных источников неравномерного тепловыделения;
2) нарушением симметрии вентиляции или отвода тепла.
К неисправностям первой группы приводит наличие в обмотке ротора витковых замыканий, расположенных неравномерно по сечению ротора. При этом часть витков в местах нарушения межвитковой изоляции шунтируется и по ним не протекает ток. Это приводит к местному понижению температуры бочки в местах расположения этих витков.
К неисправностям этой же группы можно отнести нарушение симметрии теплопроводности изоляции обмотки ротора, приводящее к местному повышению или понижению температуры. Такие явления часто наблюдаются при частичной переизолировке катушек ротора. В этом случае теплопроводность замененных в двух (нескольких) пазах гильз или других элементов пазовой изоляции может отличаться от теплопроводности старой изоляции. Отвод тепла от меди к стали ротора через слой вновь уложенной изоляции и через старую изоляцию будет различным. Это может привести к местному перегреву или недогреву бочки.
К неисправностям второй группы, приводящим к тепловой деформации роторов, относится нарушение симметрии гидравлических сопротивлений охлаждающих каналов в бочке и обмотке ротора.
В соответствии со сказанным, устранение тепловой неуравновешенности может быть осуществлено:
путем ремонта ротора с выявлением мест витковых замыканий и полной или частичной переизолировкой обмотки;
путем ремонта вентиляционной системы ротора для выравнивания гидравлических сопротивлений охлаждающих каналов в пазовой части обмотки или в роторе;
механической балансировкой при соответствующем тепловом режиме с подбором уравновешивающих грузов, компенсирующих вибрацию подшипников от теплового прогиба ротора при заданном режиме работы турбогенератора.
Выбор способа устранения тепловой разбалансировки зависит от величины и формы упругого прогиба, который получает ротор при нагреве. Если величины уравновешивающих грузов, которые компенсируют тепловую неуравновешенность, превышают предельно допустимые или форма теплового прогиба такова, что для ее компенсации может потребоваться неоднократная выемка ротора для распределения уравновешивающих грузов на бочке ротора, механическая балансировка может оказаться малоэффективной. Кроме того, следует считаться с нарушением уравновешенности на холостом ходу или других режимах, не совпадающих с заданным режимом балансировки. Возможности механической компенсации теплового небаланса ограничены величиной, которая на рабочей скорости вызывает вибрацию подшипников порядка 50 мк. Лишь при самом благоприятном взаимном расположении холодной и тепловой неуравновешенности предельная величина теплового небаланса, которая может быть скомпенсирована установкой грузов, соответствует величине, вызывающей вибрацию подшипников с амплитудой 80-110 мк. В других случаях для устранения причин, вызывающих тепловую разбалансировку, производят ремонтные работы по определению и устранению нарушений межвитковой изоляции или несимметрии вентиляционной системы. Методика тепловой балансировки роторов с непосредственным охлаждением, заключающаяся в устранении асимметрии охлаждения обмотки, приведена в литературе.
Ниже рассматривается лишь механическая балансировка и некоторое внимание уделяется вопросу выбора режима работы ротора во время его уравновешивания.
Измерение тепловой неуравновешенности ротора может быть выполнено только косвенным путем на основе сравнения векторов вибрации подшипников или доступных участков вала в холодном и нагретом состояниях при постоянной угловой скорости вращения ротора. При этом нагрев ротора должен осуществляться за счет выделения тепла при прохождении тока через его обмотку, а не за счет вентиляционных потерь.
Для контроля средней температуры обмотки ротора используется изменение сопротивления обмотки ротора при изменении ее температуры (гл.II). Измерения омического сопротивления производятся методом "вольтметра-амперметра" с использованием приборов класса 0,2 или 0,5. Особое внимание следует обратить на качество контакта и стабильность его переходного сопротивления при подключении приборов к обмотке вращающегося ротора.
Режим работы турбогенератора при нагреве ротора до температуры, соответствующей номинальной активной нагрузке, тесно связан с видом неисправностей, которые были классифицированы выше.
Для выявления тепловой неуравновешенности, вызванной нарушением симметрии вентиляции или отвода тепла (вторая группа неисправностей), требуется создать режим, при котором проявится неравенство коэффициентов теплопередачи (симметричных участков ротора). Последние зависят от теплоемкости охлаждающего газа, квадрата скорости движения газа, связанной с объемным расходом, который в свою очередь зависит от температуры газа и скорости вращения ротора.
Для определения тепловой неуравновешенности в этом случае требуется нагрев ротора номинальным током при вращении с рабочей скоростью вращения в среде охлаждающего газа номинальных параметров. Такой режим соответствует номинальной реактивной нагрузке генератора.
Для определения тепловой неуравновешенности, вызванной наличием местных источников повышенного тепловыделения (первая группа неисправностей), в некоторых случаях может оказаться достаточным лишь нагрев ротора током до температуры, соответствующей номинальной реактивной мощности при условиях охлаждения, отличающихся от номинальных. Так, нагрев может быть произведен при работе ротора с воздушным охлаждением при пониженной скорости вращения с использованием резервного возбудителя. Использование такого режима сокращает необходимое для тепловой балансировки время и трудовые затраты.
Возможность осуществления режима нагрева ротора на воздухе связана с его конструкцией.
Турбогенераторы серии ТВ-2 мощностью до 150 МВт допускают режим работы на воздухе при 3000 об/мин с нагрузкой до 80% номинальной. Турбогенераторы ТВФ-100 на воздухе допускают режим с нагрузкой до 20% номинальной. Турбогенераторы ТВВ и ТВФ больших мощностей, а также все турбогенераторы серии ТГВ не допускают режима холостого хода при 3000 об/мин на воздухе. Это связано с большими вентиляционными потерями этих машин при воздушном охлаждении.
Перед компенсацией тепловой неуравновешенности необходимо выяснить характер или форму ее распределения в роторе путем снятия скоростных характеристик вибрации нагретого ротора на выбеге.
Первый этап компенсации тепловой неуравновешенности ротора состоит в измерении исходных векторов вибрации подшипников (концов вала) ротора, являющихся реакцией от суммы холодной и горячей неуравновешенности.
Измерения производятся на стационарном, установившемся режиме номинальной активной нагрузки, при максимально возможной реактивной нагрузке и номинальных параметрах охлаждающего газа (полностью нагретый ротор). При этом регистрируется средняя температура меди ротора.
На втором этапе те же измерения вибрации должны быть повторены при режиме максимального ухудшения вентиляции ротора. Для этого тот же температурный режим обмотки ротора должен быть создан при соответственно меньших величинах тока и нагрузки, при пониженном избыточном давлении водорода до 0,05 ат в турбогенераторах с форсированным охлаждением или при переходе на режим с воздушным охлаждением в турбогенераторах, допускающих такой режим.
Если изменение режима вентиляции ротора при сохранении средней температуры ротора приводит к изменению векторов вибрации, то за исходный режим для балансировки принимается номинальный режим по всем параметрам, и измерения вибрации, сделанные на первом этапе во время этого режима, принимаются за исходные для расчета уравновешивающих грузов.
Если же изменение режима вентиляции ротора при неизменной температуре его не вызывает заметного изменения векторов вибрации, то балансировку можно проводить в режиме, когда турбогенератор отключен от сети и основным или резервным возбудителем поддерживается необходимый ток ротора для нагрева его до средней температуры, соответствующей номинальному режиму.
Если в режиме холостого хода с соответствующим током возбуждения окажется возможным поддерживать нагрев ротора и его вибрацию на уровне величин, измеренных при номинальном режиме нагрузки и охлаждения, то следует провести аналогичный режим при пониженной скорости вращения, близкой к первой критической.
Измерения вибрации в этом режиме дадут возможность более точно оценить форму симметричной составляющей тепловой неуравновешенности ротора.
Третьим этапом тепловой балансировки являются измерения векторов вибрации подшипников в режиме холостого хода при установившемся холодном состоянии ротора. Измерения производятся при двух скоростях вращения - рабочей и первой критической.
Четвертый этап заключается в определении векторов влияния от пробных систем уравновешивающих грузов в режиме холостого хода при двух скоростях вращения - рабочей и первой критической.
В зависимости от величины симметричной и кососимметричной составляющих исходных векторов вибрации и данных анализа скоростных характеристик решается вопрос о выборе симметричной или кососимметричной системы пробных грузов. При этом используются величины балансировочной чувствительности, как это описано в разделе 3 гл.IV.
Примечание. Если тепловой балансировке предшествовала балансировка холодного ротора, то используются амплитудные и фазовые значения чувствительностей, полученные при пробных пусках холодного ротора. В этом случае необходимость проведения третьего и четвертого этапов отпадает.
Пятый, заключительный этап тепловой балансировки состоит в расчете уравновешивающих грузов и проверке влияния их на вибрацию при первой критической и рабочей скоростях холодного ротора.
Величина и угол установки уравновешивающих грузов определяются в соответствии с рекомендациями и формулами раздела 3 гл.IV.
Задача компенсации тепловой неуравновешенности, в отличие от компенсации холодной неуравновешенности ротора, состоит в последовательном подборе таких уравновешивающих грузов, которые удовлетворили бы одновременно нескольким условиям.
Векторы влияния ![]() ,
, ![]() , вызванные установкой на роторе соответственно симметричных 2
, вызванные установкой на роторе соответственно симметричных 2![]() и кососимметричных 2
и кососимметричных 2![]() уравновешивающих грузов, должны, во-первых, в сумме с соответствующими составляющими исходных векторов вибрации
уравновешивающих грузов, должны, во-первых, в сумме с соответствующими составляющими исходных векторов вибрации ![]() и
и ![]() полностью нагретого ротора при рабочей скорости вращения давать вибрацию подшипников, не превышающую допуски
полностью нагретого ротора при рабочей скорости вращения давать вибрацию подшипников, не превышающую допуски
![]() (50 мк). (37)
(50 мк). (37)
Во-вторых, эти же векторы влияния в сумме с соответствующими составляющими векторов вибрации холодного ротора ![]() и
и ![]() при рабочей скорости вращения должны давать минимально возможную вибрацию подшипников
при рабочей скорости вращения должны давать минимально возможную вибрацию подшипников
![]() . (38)
. (38)
В третьих, векторы ![]() и
и ![]() в сумме с векторами
в сумме с векторами ![]() и
и ![]() должны давать допустимую вибрацию при вращении ротора с критическими скоростями, лежащими ниже рабочей
должны давать допустимую вибрацию при вращении ротора с критическими скоростями, лежащими ниже рабочей
 . (39)
. (39)
Установка грузов не должна вызывать также роста вибрации опор других роторов турбоагрегата выше нормы.
Условия (37), (38) и (39) проверяются графическим способом на балансировочных диаграммах. Если уравновешивающие грузы удовлетворяют этим условиям, то производят установку грузов на роторе и пуск турбогенератора. Целью пуска является опытная проверка расчетного влияния установленных на роторе уравновешивающих грузов в режиме холостого хода при холодном роторе.
Если проварка вибрации на холостом ходу не дала ожидаемых результатов, следует произвести корректировку уравновешивающих грузов аналогично той, которую производят при обычной балансировке (гл.IV).
После окончания тепловой балансировки проверяется вибрация подшипников ротора и всего турбоагрегата на режиме номинального теплового состояния ротора.
В ряде случаев тепловая балансировка может потребовать еще одной корректировки грузов после проверки вибрации под нагрузкой что потребует еще одного вытеснения водорода и снятия торцовых щитов генератора.
Если проведенная тепловая балансировка не дала положительных результатов, то принятию решения о повторной тепловой балансировке должен предшествовать тщательный анализ причин неудачи проделанной работы. Необходимо постараться выяснить принципиальную возможность получения удовлетворительных результатов, для чего может потребоваться снятие и анализ скоростной характеристики вибрации опор прогретого ротора.
Если установка на роторе уравновешивающих грузов не дает снижения вибрации от тепловой неуравновешенности без опасного увеличения ее на других режимах, то устранение тепловой неуравновешенности и ее последствий сводится к ремонту вентиляционной системы, а также перемотке или переизолировке обмотки ротора. Пример балансировки ротора с учетом теплового прогиба приведен в приложении 5 п.2в.
ГЛАВА VI
ОЦЕНКА КАЧЕСТВА БАЛАНСИРОВКИ РОТОРОВ
Качество балансировки, выполненной на месте установки турбоагрегата, оценивается несколькими показателями. Основным из них является вибрация подшипников уравновешиваемого ротора на рабочей скорости вращения.
В соответствии с "Правилами технической эксплуатации электрических станций и сетей" нормируется двойная амплитуда (размах) вибрации (смещения), измеренная в вертикальном, поперечном и продольном (осевом) направлениях на вершине крышки подшипника над осью симметрии вкладыша.
Для находящихся в эксплуатации турбогенераторов и возбудителей с рабочей скоростью вращения 3000 об/мин двойная амплитуда вибрации подшипников не должна превышать 50 мк, а при 1500 об/мин - 70 мк.
Нормы допустимой вибрации подшипников паровых турбин представлены в табл.3. Вибрация подшипников агрегатов с рабочей скоростью 600-1000 об/мин, не должна превышать 100 мк. Указанные допуски вибрации не должны превышаться при любом режиме работы агрегата.
Таблица 3
Нормы допустимой вибрации подшипников паровых турбин
|
Рабочая скорость вращения, об/мин |
Предельная двойная амплитуда вибрации, мк | ||
|
Отлично |
Хорошо |
Удовлетворительно | |
|
3000 |
20 |
30 |
50 |
|
1500 |
40 |
60 |
80 |
Для высокооборотных турбоагрегатов официальные нормы допустимой вибрации в условиях эксплуатации отсутствуют. Исходя из зарубежных и отечественных норм практики для машин с рабочей скоростью до 9000 об/мин, предел допустимой вибрации подшипников может быть выбран по кривой рис.40.
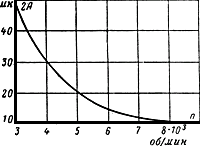
Рис.40. Допустимая вибрация подшипников высокооборотных турбоагрегатов
в условиях эксплуатации
Допускаемая вибрация турбогенераторов и возбудителей, сдаваемых из монтажа, определяется ГОСТ 533-51. Двойная амплитуда вибрации подшипников на всех режимах работы не должна превышать 50 мк.
Стационарные паровые турбины принимаются из монтажа согласно ГОСТ 5908-51 с вибрацией подшипников, не превышающей 40 мк при 3000 об/мин, 60 мк при 1500 об/мин и 20 мк при 5000 об/мин.
Все приведенные выше значения допустимой вибрации подшипников, как указывалось, являются предельными. Однако при изменении теплового и электрического режимов работы машины, как правило, наблюдаются небольшие изменения вибрации подшипников. Эти изменения можно оценить величиной двойной амплитуды, равной ±20-30% допустимого значения. Поэтому, уравновешивая турбоагрегат на холостом ходу, следует добиваться более низкого уровня вибрации, чем это предписывается нормами.
Рекомендуется заканчивать балансировку турбогенераторов, если достигнута вибрация подшипников уравновешиваемого ротора в 1,6 раза ниже, чем предельно допустимая. Это соответствует двойной амплитуде вибрации 30 мк при 3000 об/мин и 50 мк при 1500 об/мин.
Подобный уровень вибрации подшипников не должен быть также превышен после балансировки роторов низкого и среднего давления турбин.
Что касается опор ротора высокого давления, то, учитывая их более высокую динамическую жесткость по сравнению с опорами роторов среднего и низкого давления турбины и ротора генератора, рекомендуется добиваться в результате балансировки вибрации подшипников ротора высокого давления, не превышающей 20 мк.
Практика балансировки турбогенераторов на электростанциях показала, что подобный уровень вибрации подшипников на рабочей скорости вращения вполне достижим.
Двойная амплитуда вибрации подшипников в трех направлениях для турбогенераторов с рабочей скоростью 3000 об/мин не должна на первой критической скорости превышать 100 мк, а на второй - 50 мк.
Если ротор проходил уравновешивание на критических скоростях, то следует добиваться более низкого уровня вибрации. Так, правильно отбалансированный ротор должен иметь на первой критической скорости двойную амплитуду вибрации подшипников не более 50 мк, а на второй не более 30 мк.
При оценке качества балансировки ротора следует учитывать, что уровень вибрации подшипников не всегда в достаточной мере характеризует интенсивность колебаний опирающегося на подшипники ротора.
Причина различия в колебаниях концов вала и подшипников кроется в конфигурации подшипника и существовании между ним и валом масляного слоя, обладающего податливостью, соизмеримой с податливостью ротора и его опор.
Измерения, проведенные на турбогенераторах различного типа, показали, что при вибрации подшипников, не превышающей 50 мк, колебания концов вала на выходе из подшипников могут достигать 250-300 мк. Столь значительные колебания валов приводят к нарушению нормальной работы соединительных муфт, износу подшипников и уплотнений. Увеличение амплитуды колебаний ротора, т.е. его динамического прогиба, связано также с ростом напряжений в материале ротора. Поэтому в процессе балансировки следует контролировать колебания ротора и стремиться к их снижению. Практика показывает, что, производя балансировку по измерениям колебаний вала, удается снизить двойную амплитуду этих колебаний до 80-100 мк, одновременно доведя вибрацию подшипников до 15-20 мк.
Рекомендуется, чтобы после балансировки двойная амплитуда вертикальных колебаний концов вала на выходе из подшипников не превышала 150 мк в диапазоне скоростей от первой критической и до рабочей.
При уравновешивании консольного участка ротора балансировка считается законченной, когда на рабочей скорости двойная амплитуда колебаний контактных колец не превышает 350 мк.
В результате балансировки не должна повыситься вибрация подшипников роторов, связанных с уравновешиваемым. Поэтому в процессе балансировки необходимо контролировать вибрацию всех подшипников турбины, генератора и возбудителя (независимо от вида соединения роторов).
Оценка качества заводской балансировки роторов турбогенераторов производится по соответствию достигнутого уровня вибрации подшипников установленным заводским нормам. Эти нормы регламентируются параметрами устройства, в котором производится заводская балансировка, и должны обеспечить вибрацию подшипников турбогенератора на электростанции в пределах ГОСТ 533-51.
При определении норм следует учитывать ряд факторов, основным из которых является соотношение между податливостью опор ротора в балансировочном устройстве и штатных подшипников на эксплуатационном фундаменте. Существенную роль играет также смещение критических скоростей ротора из-за различной податливости опор. В результате такого смещения вибрация подшипников на более жестких опорах балансировочного стенда может оказаться выше, чем на более податливых штатных подшипниках.
На основании опыта и специальных исследований завода "Электросила" установлены нормы вибрации 8Р15 для роторов турбогенераторов различного типа, прошедших заводскую балансировку, приведенные в табл.4. Нормами задается двойная амплитуда (размах) допустимой вибрации подшипников разгонно-балансировочного сооружения, измеренной в трех направлениях: вертикальном - на крышке подшипника над осью симметрии вкладыша, поперечном и продольном - на уровне оси вращения ротора.
Таблица 4
Предельно допустимая вибрация различных типов турбогенераторов при заводской балансировке
|
Тип турбогенератора |
Предельная двойная амплитуда вибрации, мк | |
|
На первой критической скорости |
На номинальной скорости вращения | |
|
ТВ2-60-2 |
50 |
20 |
|
ТВФ-60-2 |
50 |
|
|
ТВФ-100-2 |
50 |
|
|
ТВ2-100-2 |
60 |
25 |
|
ТВВ-165-2 |
60 |
|
|
ТВВ-200-2 |
60 |
|
|
ТВ2-150-2 |
60 |
40 |
|
ТВФ-200-2 |
50 |
|
|
ТВВ-320-2 |
60 |
|
Величина динамического прогиба вала не нормируется, однако двойная амплитуда колебаний контактных колец не должна превышать 500 мк. При этом обеспечивается нормальная работа токосъемного устройства и удовлетворительное состояние узла сочленения с возбудителем.
ПРИЛОЖЕНИЕ 1
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ РОТОРОВ ТУРБОГЕНЕРАТОРОВ
(вес, основные размеры и критические скорости роторов
отечественных турбогенераторов)
|
Завод- |
Тип турбо- |
Вес рото- |
|
|
|
|
|
|
|
|
|
|
|
Критические скорости, об/мин | ||
|
мм |
|
|
| |||||||||||||
|
"Электротяж- |
ТВС-30 |
16500 |
6916 |
5620 |
2700 |
840 |
646 |
6052 |
984 |
295 |
280 |
816 |
310 |
1600 |
1560 |
>3000 |
|
"Электросила" и НТГЗ |
ТВ-60-2 |
31000 |
8650 |
6778 |
2980 |
946 |
1052 |
7197 |
1146 |
400 |
300 |
990 |
375 |
1320 |
1300 |
>3000 |
|
"Электросила" |
ТВФ-60-2 |
24200 |
7980 |
6090 |
2750 |
1086 |
1065 |
6515 |
1261 |
350 |
300 |
930 |
395 |
1640 |
1600 |
>3000 |
|
"Электросила" |
ТВ2-100-2 |
42000 |
10505 |
8550 |
5320 |
610 |
1130 |
9170 |
920 |
620 |
400 |
1000 |
359 |
1250 |
1100 |
3000 |
|
"Электросила" и НТГЗ |
ТВФ-100-2 |
29300 |
8680 |
6735 |
4286 |
1207 |
1120 |
7140 |
1410 |
405 |
325 |
1000 |
365 |
1500 |
1400 |
>3000 |
|
"Электросила" |
ТВ2-150-2 |
58600 |
11770 |
9700 |
6300 |
905 |
1130 |
10340 |
1185 |
550 |
400 |
1075 |
450 |
1070 |
1000 |
2800 |
|
"Электросила" |
ТВВ-165-2 |
33500 |
9350 |
7200 |
3850 |
1127 |
1145 |
7765 |
1317 |
390 |
350 |
1000 |
420 |
1440 |
1350 |
>3000 |
|
"Электросила" |
ТВФ-200-2 |
51000 |
11190 |
9000 |
5520 |
1110 |
1330 |
9575 |
1390 |
550 |
400 |
1075 |
367 |
1220 |
1150 |
>3000 |
|
"Электротяж- |
ТГВ-200 |
47800 |
11625 |
8100 |
4760 |
849 |
1635 |
8727 |
1162 |
533 |
435 |
1075 |
420 |
1350 |
1320 |
3200 |
|
"Электросила" |
ТВВ-220-2 |
42000 |
9770 |
7700 |
4250 |
1000 |
1210 |
8210 |
1215 |
440 |
400 |
1075 |
365 |
1350 |
1300 |
>3000 |
|
"Электросила" |
ТВВ-320-2 |
55000 |
11900 |
9700 |
5990 |
1268 |
1337 |
10212 |
1478 |
475 |
450 |
1075 |
456 |
900 |
900 |
2700 |
|
"Электротяж- |
ТГВ-300 |
56000 |
11965 |
8750 |
5500 |
750 |
1600 |
9170 |
1000 |
442 |
455 |
1120 |
450 |
1280 |
1200 |
>3000 |
Примечания: 1. Вес и размеры роторов взяты из справочника по турбогенераторам, составленного ТЭП (1960 г.). Буквенные обозначения таблицы соответствуют рис.41. 2. ![]() - расчетная первая критическая скорость на жестких опорах;
- расчетная первая критическая скорость на жестких опорах; ![]() - экспериментальные критические скорости. 3. Расчетные формы свободных изгибных колебаний роторов турбогенераторов различных типов приведены на рис.42-50.
- экспериментальные критические скорости. 3. Расчетные формы свободных изгибных колебаний роторов турбогенераторов различных типов приведены на рис.42-50.
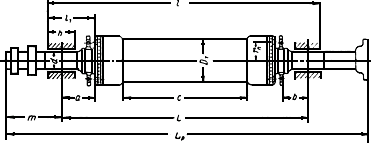
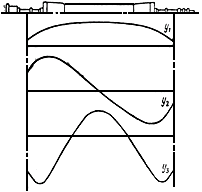
Рис.42. Расчетные формы свободных изгибных колебаний роторов на податливых опорах
для турбогенераторов типа ТВ2-60-2 (податливость опор ![]() 0,78·10
0,78·10![]() см/кг):
см/кг):![]() - кривые прогибов ротора соответственно по первой, второй в третьей формам
- кривые прогибов ротора соответственно по первой, второй в третьей формам
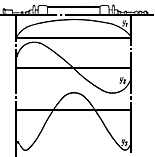
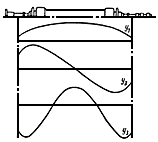
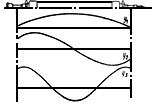
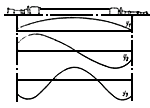
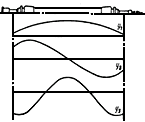
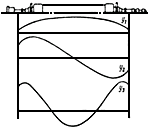
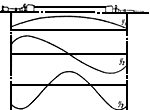
ПРИЛОЖЕНИЕ 2
Средние значения балансировочной чувствительности подшипников
отечественных турбогенераторов некоторых типов по вертикальной вибрации
|
Тип турбогенератора |
Чувствительность к системе грузов, мк/кг | |||
|
|
|
| ||
|
|
|
Симметричная |
Симметричная |
Кососим- |
|
ТВВ-200-2 |
1300 |
100 |
15 |
60 |
|
ТГВ-200 |
1350 |
44 |
55 |
106 |
|
ТВФ-200-2 |
1150 |
22 |
44 |
67 |
|
ТВВ-165-2 |
- |
- |
11* |
100* |
|
ТВ2-150-2 |
- |
- |
10 |
30 |
|
ТВ-100-2 |
- |
- |
27 |
- |
|
ТВ2-100-2 |
1150 |
23 |
25 |
50 |
|
ТВ-50-2 |
1300 |
25 |
Нечувствительная скорость |
54 |
|
Т2-50-2 |
1300 |
25 |
То же |
70 |
|
ТВС-30-2 |
1500 |
108 |
50 |
140 |
|
Т2-12-2 |
- |
- |
85 |
62 |
|
Т-12-2 |
- |
- |
110 |
60 |
_________________
* Пуск без турбины в режиме синхронного компенсатора.
ПРИЛОЖЕНИЕ 3
ПЕРЕНОС УРАВНОВЕШИВАЮЩИХ ГРУЗОВ ИЗ БАЛАНСИРОВОЧНЫХ ПЛОСКОСТЕЙ
В отдельных случаях, когда уравновешивание ротора не может быть выполнено путем установки грузов в две балансировочные плоскости или когда в результате балансировки ротора следует установить большие по весу грузы, что с точки зрения прочности несущих конструкций угрожает безопасности работы турбогенератора, грузы распределяются по длине ротора или переносятся в другие сечения.
Необходимость переноса грузов возникает в следующих случаях:
1) симметричные грузы, установленные при балансировке на первой критической скорости, вызывают повышенную синфазную вибрацию на рабочей скорости;
2) кососимметричные грузы, установленные при балансировке на второй критической скорости, вызывают повышенную противофазную вибрацию на рабочей скорости;
3) симметричные грузы, установленные при балансировке на рабочей скорости, вызывают повышенную вибрацию на первой критической скорости;
4) нечувствительная скорость к симметричным грузам, помещенным в балансировочные плоскости, совпадает с рабочей скоростью.
Наиболее часто в практике уравновешивания как на заводах-изготовителях, так и на электростанциях имеет место перенос грузов по пп.1 и 3, реже по п.4. С переносом кососимметричных грузов приходится иметь дело практически лишь в условиях заводского испытательного стенда. Большая податливость его фундамента приводит к тому, что для машин с ![]() на вибрацию при рабочей скорости оказывает влияние составляющая прогиба ротора по четвертой форме.
на вибрацию при рабочей скорости оказывает влияние составляющая прогиба ротора по четвертой форме.
В условиях электростанции случаи, указанные в п.2, пока не наблюдались. Однако перенос кососимметричных грузов иногда производится с целью расчистки балансировочных пазов.
При переносе грузов необходимо выполнить два условия:
1) сохранить вибрацию, достигнутую на определенной скорости вращения после уравновешивания ротора грузами, помещенными в балансировочные плоскости;
2) не ухудшить вибрационного состояния машины на всех других скоростях, лежащих в пределах от нуля до рабочей.
В настоящее время в практике балансировки применяются в основном два метода переноса грузов.
Первый метод переноса основан на использовании условия ортогональности форм свободных изгибных колебаний ротора (гл.I). В соответствии с этим условием работа, выполняемая грузами до и после переноса на перемещениях по устраняемой составляющей динамического прогиба ![]() -й формы, должна быть равна:
-й формы, должна быть равна:
![]() . (40)
. (40)
В то же время работа грузов после переноса на перемещениях по составляющим ![]() -й формы должна быть равна нулю
-й формы должна быть равна нулю
![]() , (41)
, (41)
где ![]() - вес груза, устанавливаемого в каждой из двух балансировочных плоскостей;
- вес груза, устанавливаемого в каждой из двух балансировочных плоскостей;
![]() - вес груза, помещаемого в каждое из
- вес груза, помещаемого в каждое из ![]() сечений по длине ротора после переноса;
сечений по длине ротора после переноса;
![]() - ординаты прогиба
- ординаты прогиба ![]() -й формы в сечениях установки балансировочных грузов;
-й формы в сечениях установки балансировочных грузов;
![]() - ординаты прогиба
- ординаты прогиба ![]() -й формы в
-й формы в ![]() сечениях, куда помещаются переносимые грузы;
сечениях, куда помещаются переносимые грузы;
![]() - радиусы установки грузов соответственно в балансировочных плоскостях и на бочке ротора.
- радиусы установки грузов соответственно в балансировочных плоскостях и на бочке ротора.
Этот метод переноса грузов используется преимущественно при заводской балансировке несвязанных роторов генераторов, формы свободных колебаний (приложение 1) которых известны.
Второй метод переноса основан на соблюдении условия сохранения равенства амплитуд колебаний подшипников (концов вала) до и после переноса уравновешивающих грузов. Общая формула переноса грузов в этом случае имеет вид:
![]() , (42)
, (42)
где ![]() - коэффициент гибкости ротора.
- коэффициент гибкости ротора.
Коэффициент гибкости определяется размерами и упругомассовыми свойствами ротора на жестких опорах. С другой стороны, ![]() зависит от вида переноса грузов и от скорости, на которой производилась балансировка.
зависит от вида переноса грузов и от скорости, на которой производилась балансировка.
Второй метод переноса используется при балансировке в условиях электростанций, когда неизвестны точные формы свободных колебаний связанной системы роторов.
Ниже описывается практическое пользование обоими методами переноса уравновешивающих грузов.
1. Перенос грузов при заводской балансировке роторов генераторов
Перенос по первой форме колебаний. Условие сохранения уравновешенности ротора после балансировки на первой критической скорости удовлетворяется, если переносимый на бочку груз пересчитать в отношении ординат первой формы колебаний по формуле (40)
![]() , (43)
, (43)
где ![]() - суммарный вес груза, устанавливаемого на бочку ротора;
- суммарный вес груза, устанавливаемого на бочку ротора;
2![]() - суммарный вес груза, подлежащего переносу;
- суммарный вес груза, подлежащего переносу;
![]() - величина прогиба по первой форме в сечении балансировочной плоскости (берется из атласа форм колебаний для данного типа роторов);
- величина прогиба по первой форме в сечении балансировочной плоскости (берется из атласа форм колебаний для данного типа роторов);
![]() - величина прогиба по первой форме в выбранной плоскости установки груза (берется там же).
- величина прогиба по первой форме в выбранной плоскости установки груза (берется там же).
Плоскости установки грузов на бочке выбираются из условия (41), которое проще всего выполняется, если грузы на бочке расположить симметрично относительно узлов второй и третьей форм колебаний.
Пример переноса по первой форме колебаний приводится в приложении 5.
Перенос по второй форме колебаний. Пересчет производится по той же формуле (40) с заменой прогиба по первой форме ![]() прогибом по второй форме
прогибом по второй форме ![]() .
.
На бочке кососимметричную систему грузов размещают на крайних отсеках сразу за бандажными кольцами.
Перенос по третьей форме колебаний. Симметричные системы грузов в балансировочных (торцовых) плоскостях заменяются V-образной.
Пересчет осуществляется в два этапа:
1. Из условия ортогональности устанавливаемой V-образной системы грузов к первой форме колебаний определяется соотношение между грузом балансировочной плоскости ![]() и грузом, устанавливаемым в середину бочки
и грузом, устанавливаемым в середину бочки ![]()
![]() ,
,
![]() . (44)
. (44)
2. Из условия сохранения состояния уравновешенности по третьей форме определяется соотношение между грузами переносимой симметричной системы ![]() и устанавливаемой V-образной системой грузов
и устанавливаемой V-образной системой грузов
![]() . (45)
. (45)
Из уравнений (44) и (45) находим величины грузов ![]() и
и ![]() , входящих в V-образную систему.
, входящих в V-образную систему.
Числовой пример. Требуется выполнить перенос по третьей форме симметричной системы грузов по 4,2 кг на сторону, установленных в заточках центрирующих колец турбогенератора ТВВ-320-2.
Радиус установки грузов (из приложения 1):
в заточке ![]() 456 мм
456 мм
на бочке ![]() 538 мм.
538 мм.
Величины ординат прогибов (из атласа форм колебаний)
|
По первой форме |
По третьей форме |
|
В плоскости заточки |
|
|
В середине бочки |
|
Подстановкой в формулу (44) находим:
![]() .
.
Подстановкой в формулу (45) определяем соотношение между ![]() и
и ![]() :
:
![]() ;
;![]() ;
; ![]() кг;
кг;![]() кг.
кг.
Грузы в торце ставятся на тот же угол, что и симметричная система грузов; груз на бочке ставится на диаметрально противоположный угол.
2. Перенос грузов при эксплуатационной балансировке
1. Симметричные грузы после уравновешивания на первой критической скорости заменяются равномерно распределенной системой грузов (рис.51) для того, чтобы не вызвать повышенной синфазной вибрации на рабочей скорости.
Рис.51. Эскиз ротора, иллюстрирующий перенос балансировочных грузов при уравновешивании
на первой критической скорости:
1 - симметричная система единичных грузов; 2 - заменяющая ее
система грузов, распределенных по длине ротора
В этом случае коэффициент гибкости в формуле (42) определяется следующим образом:
 .
.
Обозначения, принятые в выражении для ![]() , взяты в соответствии с приложением 1.
, взяты в соответствии с приложением 1.
Для роторов крупных турбогенераторов при уравновешивании на первой критической скорости можно принять
![]() .
.
На рис.52 дана зависимость коэффициента гибкости ![]() от
от ![]() для различных значений
для различных значений ![]() .
.
Рис.52. Зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() . Два симметричных груза
. Два симметричных груза
заменяются равномерно распределенными грузами при ![]() 1,08
1,08
Пример. В результате уравновешивания ротора на первой критической скорости 1300 об/мин в балансировочные плоскости установлены симметричные грузы, суммарный вес которых равен 8 кг. Требуется заменить симметричные грузы равномерно распределенной системой грузов.
Исходные данные: ![]() 1300 об/мин;
1300 об/мин; ![]() 1400 об/мин;
1400 об/мин; ![]() 0,2;
0,2; ![]() 0,3;
0,3; ![]() 375 мм;
375 мм; ![]() 495 мм;
495 мм; ![]() 1,08.
1,08.
По графику рис.52 определяем, что коэффициент гибкости ![]() 0,676.
0,676.
Следовательно,
![]() кг.
кг.
2. Для случая, когда два симметричных груза заменяются также двумя симметричными, расположенными в других плоскостях, коэффициент гибкости определяется следующим образом:
 .
.
На рис.53 дана зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() при
при ![]() 1,08.
1,08.
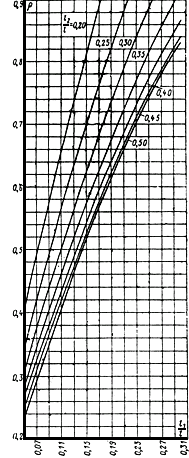
Рис.53. Зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() . Два симметричных груза
. Два симметричных груза
заменяются двумя симметричными при ![]() 1,08
1,08
Пример. Пусть в результате балансировки ротора на первой критической скорости в балансировочные плоскости установлены два симметричных груза весом по 7 кг. Перенесем эти грузы в плоскости ротора, установка в которых симметричных грузов не возбуждает вибрацию подшипников на рабочей скорости вращения. В качестве таковых выбраны плоскости, для которых нечувствительная скорость ![]() 3000 об/мин.
3000 об/мин.
Исходные данные: ![]() 0,8;
0,8; ![]() 0,1;
0,1; ![]() 1200 об/мин;
1200 об/мин; ![]() 3000 об/мин;
3000 об/мин; ![]() =2,5.
=2,5.
По графику для нечувствительных скоростей (см. рис.13) определяем ![]() 0,24.
0,24.
Далее определяем по графику рис.53 коэффициент гибкости ![]() 0,53.
0,53.
Следовательно,
![]() кг.
кг.
Таким образом, в плоскости, расположенные на расстоянии ![]() от опор, следует установить симметричные грузы, суммарный вес которых составляет около 6 кг.
от опор, следует установить симметричные грузы, суммарный вес которых составляет около 6 кг.
3. После уравновешивания на рабочей скорости два симметричных груза, установленные в балансировочные плоскости, заменяются V-образной системой из трех грузов. Перенос делается для того, чтобы не повысилась вибрация на первой критической скорости. Два симметричных груза располагаются по краям бочки ротора, а один - в середине длины (рис.54).
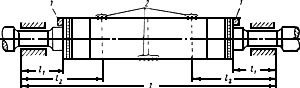
Рис.54. Эскиз ротора, иллюстрирующий перенос балансировочных грузов
при уравновешивании на рабочей скорости вращения:
1 - симметричная система единичных грузов; 2 - заменяющая ее система грузов
Суммарный вес 2![]() симметричных грузов определяется по формуле
симметричных грузов определяется по формуле
![]() .
.
Коэффициент гибкости для этого случая будет иметь вид:
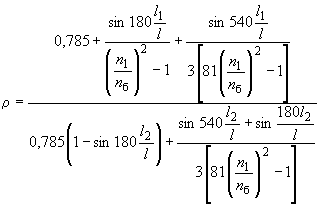 .
.
Величина третьего груза определяется по формуле
![]() .
.
Из условия получения минимума грузов ![]() и
и ![]() расстояние
расстояние ![]() следует выбирать минимальным.
следует выбирать минимальным.
На рис.55 дана зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() при
при ![]() 0,4.
0,4.
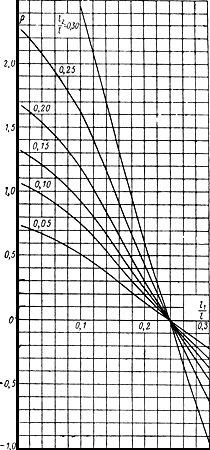
Рис.55. Зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() . Два симметричных
. Два симметричных
груза заменяются системой трех грузов при ![]() 0,4
0,4
Пример. Пусть в результате балансировки на рабочей скорости вращения установлены два симметричных груза по 3,5 кг. Для уравновешиваемого ротора
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
По графику определяем ![]() 1,37.
1,37.
Следовательно,
![]() кг;
кг; ![]() кг;
кг;![]() кг.
кг.
Таким образом, на ротор следует установить два симметричных груза весом по 3,85 кг каждый в плоскости ![]() и третий груз весом 2,38 кг в середину ротора.
и третий груз весом 2,38 кг в середину ротора.
4. Перенос кососимметричных грузов из балансировочных плоскостей на ротор производится в случаях, когда грузы в значительной степени заполнили балансировочные пазы, что затрудняет возможность последующей балансировки ротора.
Величина заменяющих грузов (рис.56) определяется по следующей формуле:
![]() .
.
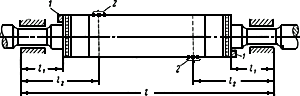
Рис.56. Эскиз ротора генератора, иллюстрирующий перенос балансировочных грузов:
1 - кососимметричная система единичных грузов; 2 - заменяющая ее система грузов
Коэффициент гибкости ![]() для этого случая имеет вид:
для этого случая имеет вид:
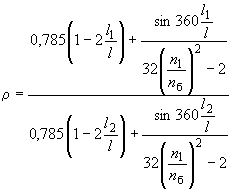 ,
,
где ![]() - суммарный вес заменяющих кососимметричных грузов.
- суммарный вес заменяющих кососимметричных грузов.
На рис.57 дана зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() при
при ![]() 0,4.
0,4.
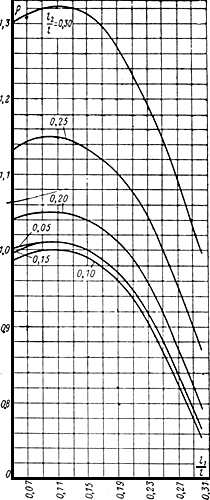
Рис.57. Зависимость ![]() от
от ![]() для различных значений
для различных значений ![]() . Два кососимметричных груза
. Два кососимметричных груза
заменяются двумя кососимметричными грузами при ![]() 0,4
0,4
Пример. Исходные данные: ![]() 0,15;
0,15; ![]() 0,25;
0,25; ![]() 0,4;
0,4; ![]() 0,8;
0,8; ![]() 8 кг (суммарный вес кососимметричных грузов).
8 кг (суммарный вес кососимметричных грузов).
По графику определяем ![]() 1,13.
1,13.
Следовательно, ![]() 0,8·8·1,13=7,2 кг.
0,8·8·1,13=7,2 кг.
Ставим на бочку ротора два кососимметричных груза по 3,6 кг.
5. В том случае, когда два симметричных груза заменяются системой грузов, распределенных по синусоидальному закону, пересчет грузов ведется по следующей формуле:
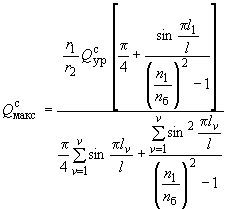 ,
,
где ![]() - вес груза, устанавливаемого в середине ротора.
- вес груза, устанавливаемого в середине ротора.
Суммарный вес двух симметричных грузов, которые устанавливаются в симметричных по длине сечениях ![]() , определяется по формуле
, определяется по формуле
![]() .
.
Пример. Пусть в результате уравновешивания на скорости ![]() 1,08 установлены в сечении
1,08 установлены в сечении ![]() 0,15 два симметричных груза, суммарный вес которых равен 6,0 кг. Требуется распределить их по синусоидальному закону в 17 сечениях, равномерно расположенных по длине бочки ротора.
0,15 два симметричных груза, суммарный вес которых равен 6,0 кг. Требуется распределить их по синусоидальному закону в 17 сечениях, равномерно расположенных по длине бочки ротора.
Вычисления, связанные с распределением грузов, приведены ниже (см. таблицу).
|
|
0,1 |
0,15 |
0,2 |
0,25 |
0,3 |
0,35 |
0,4 |
0,45 |
0,5 |
|
|
0,309 |
0,454 |
0,588 |
0,707 |
0,809 |
0,891 |
0,951 |
0,988 |
1,0 |
|
|
0,095 |
0,206 |
0,346 |
0,5 |
0,655 |
0,794 |
0,904 |
0,976 |
1,0 |
|
|
0,171 |
0,251 |
0,325 |
0,391 |
0,447 |
0,493 |
0,526 |
0,546 |
0,553 |
|
|
|
ПРИЛОЖЕНИЕ 4
БАЛАНСИРОВОЧНЫЕ ГРУЗЫ
Балансировочные грузы для роторов турбогенераторов предназначены для установки на бочку либо в специальные торцовые заточки (штатные балансировочные пазы), имеющие форму "ласточкиного хвоста".
Груз, устанавливаемый на бочку, называется пробкой (рис.58, ![]() и в). На роторах типа ТВ2 пробка вворачивается в резьбовые отверстия на пазовом клине, на роторах типа ТВВ - в отверстия на большом зубе. Чтобы установленные грузы не создавали несимметрии обтекания ротора охлаждающим газом, в отверстия диаметрально противоположно пробкам устанавливают дюралюминиевые заглушки (см. рис.58, б).
и в). На роторах типа ТВ2 пробка вворачивается в резьбовые отверстия на пазовом клине, на роторах типа ТВВ - в отверстия на большом зубе. Чтобы установленные грузы не создавали несимметрии обтекания ротора охлаждающим газом, в отверстия диаметрально противоположно пробкам устанавливают дюралюминиевые заглушки (см. рис.58, б).
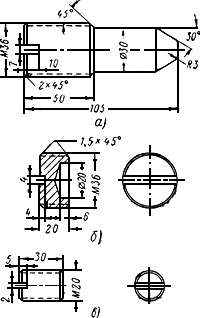
Рис.58. Грузы для установки на бочку:![]() - пробка весом 530 г; б - дюралюминиевая заглушка весом 50 г; в - пробка весом 60 г
- пробка весом 530 г; б - дюралюминиевая заглушка весом 50 г; в - пробка весом 60 г
Для установки в торцовые заточки служат грузы со стандартизованными размерами (рис.59, ![]() ). Если дуга, занимаемая ими, превышает 60°, то равнодействующая радиальная сила уменьшается и ее следует подсчитать по формуле
). Если дуга, занимаемая ими, превышает 60°, то равнодействующая радиальная сила уменьшается и ее следует подсчитать по формуле
 ,
,
где ![]() - равнодействующая;
- равнодействующая;
![]() - вес распределенного груза;
- вес распределенного груза;
![]() - дуга, на которой распределен груз.
- дуга, на которой распределен груз.
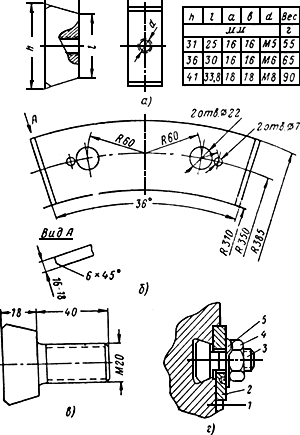
Рис.59. Грузы для установки в заточку: ![]() - стандартный груз типа БГ; б - груз типа БЛ; в - болт для крепления груза БЛ; г - схема
- стандартный груз типа БГ; б - груз типа БЛ; в - болт для крепления груза БЛ; г - схема
установки груза БЛ; 1 - ступица вентилятора; 2 - груз БЛ; 3 - болт; 4 - гайка; 5 - шайба
Распределение грузов на дуге более чем 120° практически не дает приращения равнодействующей, поэтому для установки большого сосредоточенного груза применяют конструкцию типа БЛ (рис.59, б). Чтобы центробежные силы не нагружали болты (рис.59, в), на центрирующем кольце и ступице вентилятора предусмотрен уступ для упора груза (рис.59, г).
Все грузы, кроме заглушек, изготавливаются из стали Ст.3.
В случае отличия конструкции груза от приведенных следует наиболее нагруженные сечения проверять расчетом на допускаемые напряжения.
Центробежная сила 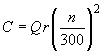 кг,
кг,
где ![]() - вес груза, кг;
- вес груза, кг;
![]() - радиус установки, см;
- радиус установки, см;
![]() - скорость вращения, об/мин.
- скорость вращения, об/мин.
Расчетные сечения болтов:
|
Резьба |
М10 |
М12 |
М16 |
М20 |
М24 |
|
Сечение, см |
0,6 |
0,75 |
1,4 |
2,2 |
3,1 |
Допускаемые напряжения, кг/см![]() :
:
|
растяжения |
1000 |
|
среза |
600 |
По окончании уравновешивания грузы стопорятся: пробки и заглушки путем кернения материала бочки против шлица; малые грузики, помимо того, зарубкой по краям; гайки на болтах - специальными шайбами с отогнутыми лепестками (рис.59, г),
В заключение приведем таблицу предельного веса грузов, допускаемых для установки в балансировочных плоскостях по условиям прочности деталей, несущих эти грузы.
|
Место установки |
Предельный груз, кг |
Тип генератора |
|
Ступица пропеллерного вентилятора |
15 |
Все отечественные турбогенераторы, кроме ТВВ-500-2 и ТВФ-200 |
|
Центрирующее кольцо, посаженное на вал |
15 |
ТВВ-500-2, имеющий бандаж, посаженный только на бочку |
|
Центрирующее кольцо без посадки на вал |
8 |
|
|
Специальное балансировочное кольцо |
6 |
ТВФ-200 |
ПРИЛОЖЕНИЕ 5
ПРИМЕРЫ БАЛАНСИРОВКИ
1. Пример балансировки ротора турбогенератора ТВВ-165 на заводе-изготовителе
а) Статическая балансировка. При первой самоустановке на параллелях определяем угол легкого места ![]() 290°. Устанавливаем на ротор пробный груз
290°. Устанавливаем на ротор пробный груз ![]() 6 кг на угол (
6 кг на угол (![]() +90°)=290+90=20°*. При второй самоустановке ротора определяем
+90°)=290+90=20°*. При второй самоустановке ротора определяем ![]() 250°. Находим:
250°. Находим:
________________
* Соответствует оригиналу. - Примечание изготовителя базы данных.
![]() .
.
Величина уравновешивающего груза
![]() кг.
кг.
Для установки грузов на бочке ротор ТВВ-165 имеет на большом зубе четыре ряда отверстий (по 27 в ряду). Раскладываем вектор ![]() 7,1/290 по направлению ближних рядов отверстий (рис.60), получаем:
7,1/290 по направлению ближних рядов отверстий (рис.60), получаем:
в ряду 205° - 6,7 кг, что соответствует ![]() пробкам;
пробкам;
в ряду 335° - 9,4 кг, что соответствует ![]() пробкам (0,53 кг - вес балансировочной пробки, 0,05 кг - вес устанавливаемой напротив нее заглушки).
пробкам (0,53 кг - вес балансировочной пробки, 0,05 кг - вес устанавливаемой напротив нее заглушки).
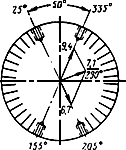
Рис.60. Распределение статического небаланса по рядам отверстий на бочке ротора типа ТВВ
Вторая критическая скорость для ротора турбогенератора ТВВ-165 находится выше рабочей, поэтому распределение статического небаланса можно выполнить двумя, равноценными способами: равномерно вдоль бочки (рис.61, ![]() ) или ортогонально третьей форме (рис.61, б).
) или ортогонально третьей форме (рис.61, б).
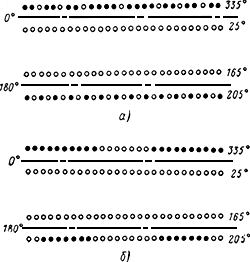
Рис.61. Равномерное ![]() и ортогональное третьей форме (б) размещение
и ортогональное третьей форме (б) размещение
статического небаланса на бочке ротора генератора ТВВ-165-2
б) Динамическая балансировка. При первом пуске в разгонно-балансировочном сооружении вибрация опор превышает норму как на первой критической, так и на рабочей скорости вращения. Уравновешивание проводится последовательно: сначала устраняют составляющую прогиба ротора по первой форме колебаний на первой критической скорости, затем по более высоким формам - на рабочей скорости.
Вибрация на первой критической скорости составила:
![]() ;
; ![]() *.
*.
__________________
* Случай повышенной вибрация опор при первой критической скорости приведен для того, чтобы рассмотреть процесс динамической балансировки в полном виде. На самом деле после статической балансировки она всегда ниже нормы.
На круговой диаграмме (рис.62) строим векторы ![]() и их полусумму
и их полусумму ![]() 57/50 (вектор, проведенный в середину отрезка, соединяющего концы
57/50 (вектор, проведенный в середину отрезка, соединяющего концы ![]() и
и ![]() ). Величина пробного груза
). Величина пробного груза
 кг,
кг,
где ![]() 57 мк - амплитуда вектора
57 мк - амплитуда вектора ![]() (определяется из диаграммы);
(определяется из диаграммы);
![]() 13 мк/кг - амплитуда вектора чувствительности на первой критической скорости (из приложения 2).
13 мк/кг - амплитуда вектора чувствительности на первой критической скорости (из приложения 2).
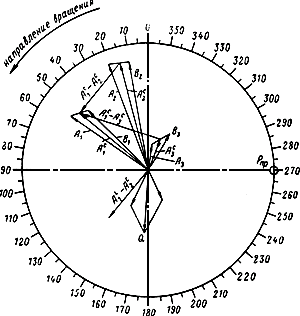
Рис.62. Векторные построения при балансировке на первой критической скорости
Пробную симметричную систему грузов установим в заточку центрирующих колец на одинаковый угол ![]() 270°, выбранный произвольно. В случае, если для применяемого прибора имеются поправки для определения "бьющей" точки, угол
270°, выбранный произвольно. В случае, если для применяемого прибора имеются поправки для определения "бьющей" точки, угол ![]() определяется согласно указаниям гл.III с учетом этих поправок.
определяется согласно указаниям гл.III с учетом этих поправок.
На втором пуске вертикальная вибрация опор составила:
![]() ;
; ![]() .
.
На диаграмме строим векторы
![]() и
и ![]() .
.
Этот вектор направлен от конца ![]() к концу
к концу ![]() ; определяем
; определяем ![]() 40/142.
40/142.
Рассчитываем уравновешивающий груз
 кг;
кг;![]() .
.
Этот груз перенесем на бочку ротора, для чего проделаем пересчет:
Суммарный груз, подлежащий переносу, ![]() 6,3 кг.
6,3 кг.
Радиус установки груза в балансировочной плоскости (в заточке) ![]() 420 мм.
420 мм.
Радиус установки груза на бочке ![]() 500 мм.
500 мм.
Прогиб по первой форме под плоскостью заточки центрирующих колец ![]() 15 мм.
15 мм.
Прогиб по первой форме под плоскостью бочки, куда переносится груз - на расстоянии 0,2![]() от края бочки (прогибы берутся из приложения 1, рис.46 в масштабе чертежа)
от края бочки (прогибы берутся из приложения 1, рис.46 в масштабе чертежа) ![]() 22 мм.
22 мм.
Груз, подлежащий установке на бочку, составляет:
![]() кг.
кг.
Угол установки остается тем же: ![]() 178°.
178°.
Раскладываем этот вектор в направлении рядов 155 и 205° (рис.62); получаем в ряду 155° - 2,4 кг, или пять пробок, в ряду 205° - 2,0 кг, или четыре пробки.
Расстановку этих грузов осуществляем путем удаления пяти пробок из ряда 335° и добавления четырех пробок в ряде 205°, что соответствует 4,0 кг (177°). При пуске с установленным ![]() вибрация опор на первой критической скорости составляет:
вибрация опор на первой критической скорости составляет:
![]() ,
, ![]() .
.
Рассчитаем чувствительности вибрации опор на первой критической скорости при установке груза в заточку и на бочку
|
Номер пуска |
|
|
|
|
I-II |
40/142 |
4,4/270 |
9/232 |
|
I-III |
55/72 |
4,1/177 |
13,5/255 |
Чувствительность к грузу на бочке оказывается в полтора раза большей, чем в заточке. Для фазовой чувствительности можно принять ее среднее значение ![]() 243°.
243°.
На этом заканчивают уравновешивание на первой критической скорости и переходят к уравновешиванию на рабочей скорости, вибрация при которой составила
![]() и
и ![]() ,
,
полуразность ![]() - вектор, соединяющий концы
- вектор, соединяющий концы ![]() и
и ![]() (рис.63).
(рис.63).
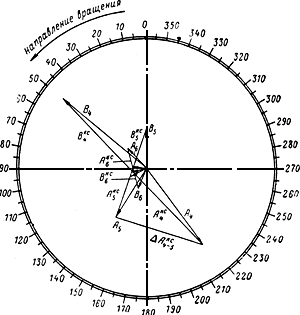
Рис.63. Векторные построения при балансировке второй формы небаланса на рабочей скорости
Чувствительность к кососимметричному грузу на рабочей скорости для ротора этого типа составляет 50 мк/кг (приложение 2). Фазовая чувствительность определяется следующим образом: при балансировке на первой критической скорости имеет ![]() 243°. Если бы уравновешивание велось перед первой критической скоростью (например, при 1000 об/мин), то эта чувствительность могла бы быть принята равной 243-90=153°. Поскольку у ротора турбогенератора ТВВ-165-2
243°. Если бы уравновешивание велось перед первой критической скоростью (например, при 1000 об/мин), то эта чувствительность могла бы быть принята равной 243-90=153°. Поскольку у ротора турбогенератора ТВВ-165-2 ![]() , очевидно, что при балансировке по второй форме неуравновешенности на рабочей скорости фазовая чувствительность также принимается равной 153°. Это будет справедливо при условии линейности фазовой характеристики применяемой балансировочной аппаратуры. Если эта характеристика нелинейна, то найденный угол подвергается корректированию по прилагаемым к прибору поправочным кривым.
, очевидно, что при балансировке по второй форме неуравновешенности на рабочей скорости фазовая чувствительность также принимается равной 153°. Это будет справедливо при условии линейности фазовой характеристики применяемой балансировочной аппаратуры. Если эта характеристика нелинейна, то найденный угол подвергается корректированию по прилагаемым к прибору поправочным кривым.
Итак ![]() 50/153.
50/153.
Теперь пробный груз можно определить по формуле:
 .
.
Поскольку вибрация опор велика, неудачная установка столь большого груза не позволит поднять скорость вращения до 3000 об/мин. Поэтому целесообразно несколько уменьшить его величину. Окончательно выбирает ![]() 1,5/70 на стороне
1,5/70 на стороне ![]() (турбины) и соответственно 1,5/250 на стороне
(турбины) и соответственно 1,5/250 на стороне ![]() (возбудителя). Эти грузы устанавливаем в заточку центрирующих колец. На втором пуске вибрация опор составила
(возбудителя). Эти грузы устанавливаем в заточку центрирующих колец. На втором пуске вибрация опор составила
![]() ,
, ![]() .
.
Строим ![]() и вектор приращения
и вектор приращения ![]() 118/249.
118/249.
Уравновешивающий груз
 кг со стороны
кг со стороны ![]() ;
;
![]()
и соответственно 1,7 кг на угле 224° со стороны ![]() .
.
Устанавливаем эти грузы на ротор, предварительно сняв пробную систему.
Вибрация опор на шестом пуске
![]() ,
, ![]() .
.
Полуразность ![]() 28/14,
28/14, ![]() 28/194.
28/194.
Циклом в три пуска удалось снизить противофазную составляющую вибраций в ![]() раза. Произведем корректирование вектора
раза. Произведем корректирование вектора ![]() , предварительно рассчитав чувствительность (табл.2 и рис.63)
, предварительно рассчитав чувствительность (табл.2 и рис.63)
|
Номер пуска |
|
|
|
|
IV-V |
118/249 |
1,5/70 |
73/179 |
|
IV-VI |
160/218 |
1,7/44 |
94/174 |
|
V-VI |
85/172 |
0,85/343 |
100/189 |
Имеющийся разброс величины ![]() , помимо погрешностей в измерениях и установках грузов, объясняется возможной нелинейностью системы ротор-опоры при больших (пуск IV) и малых (пуск VI) амплитудах вибрации. За истинное значение чувствительности можно принять ее среднее значение
, помимо погрешностей в измерениях и установках грузов, объясняется возможной нелинейностью системы ротор-опоры при больших (пуск IV) и малых (пуск VI) амплитудах вибрации. За истинное значение чувствительности можно принять ее среднее значение ![]() 89/181.
89/181.
Груз, необходимый для уравновешивания вектора, ![]() .
.  со стороны
со стороны ![]() и соответственно 0,31/13 со стороны
и соответственно 0,31/13 со стороны ![]() .
.
Эту пару грузов сложим с ранее установленной и получим результирующий уравновешивающий груз по второй форме (рис.63):
сторона ![]() - 1,41/51, сторона
- 1,41/51, сторона ![]() - 1,41/231.
- 1,41/231.
На очередном (седьмом от начала уравновешивания) пуске вибрация опор снижена до приемлемых величин и балансировку можно считать оконченной.
в) Анализ результатов. 1. Полусумма вертикальной вибрации на последнем пуске составляет 18 мк, горизонтальный - 29 мк, что вызвано наличием соответствующей третьей формы неуравновешенности, балансировку по которой можно проводить путем установки полной V-образной системы грузов на ротор или единичного груза в консольную плоскость. Фазовая чувствительность будет при этом примерно той же, что и для второй формы, поскольку третья критическая скорость также находится выше рабочей.
2. Уравновешивание на первой критической скорости почти не сказалось на вибрации при рабочей скорости (см. формуляр пусков I и III); поэтому вполне допустимо проводить одновременную компенсацию двух форм неуравновешенности - первой и второй. Процесс балансировки занял бы в этом случае не шесть, а четыре пуска.
3. Фазовое значение чувствительности по результатам пусков с уравновешиванием пары ![]() 183°. Та же фазовая чувствительность, подсчитанная по результатам уравновешивания при первой критической скорости,
183°. Та же фазовая чувствительность, подсчитанная по результатам уравновешивания при первой критической скорости, ![]() 153°.
153°.
Увеличение ![]() можно объяснить тем, что вторая критическая скорость находится ближе к рабочей, чем мы ранее предполагали. Об этом же свидетельствует и увеличение амплитудной чувствительности до 90 вместо 50 мк/кг.
можно объяснить тем, что вторая критическая скорость находится ближе к рабочей, чем мы ранее предполагали. Об этом же свидетельствует и увеличение амплитудной чувствительности до 90 вместо 50 мк/кг.
2. Примеры балансировки роторов на электростанциях
а) Уравновешивание ротора турбогенератора ТВ2-100-2. Ротор генератора весом 42000 кг имеет критические скорости: ![]() 1150 об/мин;
1150 об/мин; ![]() 3300 об/мин.
3300 об/мин.
Балансировка проводится по вертикальным составляющим вибрации подшипников.
Результаты измерений вибрации, расчетов и необходимых построений фиксируются в соответствующем формуляре.
Формуляр балансировки ротора турбогенератора ТВВ-165-2 в РБС
|
|
Вибрация опор, мк/град |
Грузы, кг/град | |||||||
|
Верти- |
Попереч- |
Осевая |
Верти- |
Попереч- |
Осевая |
Сторона Т |
Сторона В | ||
|
Пуск I | |||||||||
|
|
55/45 |
-/- |
-/- |
60/55 |
-/- |
-/- |
На бочке выставлен груз по результатам статической балансировки; 14 пробок в ряду 205°; 20 пробок в ряду 335°; | ||
|
3000 |
127/205 |
56/- |
140/220 |
141/55 |
40/- |
150/50 |
|||
|
Пуск II | |||||||||
|
|
|
|
|
|
|
|
Груз установлен в заточку центрирующего кольца | ||
|
|
70/10 |
-/- |
-/- |
72/20 |
-/- |
-/- |
2,2/270 |
2,2/270 | |
|
Пуск III | |||||||||
|
|
27/330 |
-/- |
-/- |
17/353 |
-/- |
-/- |
Добавлено четыре пробки | ||
|
3000 |
124/127 |
55/150 |
130/- |
144/50 |
35/247 |
150/- |
| ||
|
Пуск IV | |||||||||
|
|
|
|
|
|
|
|
Статика та же Установлена пара грузов в центрирующем кольце | ||
|
3000 |
76/148 |
-/- |
-/- |
50/0 |
-/- |
-/- |
1,5/70 |
1,5/250 | |
|
Пуск V | |||||||||
|
|
|
|
|
|
|
|
Кососимметричная система грузов изменена и повернута | ||
|
3000 |
36/42 |
35/205 |
-/- |
28/157 |
30/150 |
-/- |
1,7/44 |
1,7/224 | |
|
Пуск VI | |||||||||
|
Окончательно установлена кососимметричная система | |||||||||
|
|
25/300 |
-/- |
-/- |
20/330 |
-/- |
-/- |
1,41/51 |
1,41/231 | |
|
3000 |
20/70 |
31/185 |
25/80 |
16/295 |
27/175 |
20/300 |
|||
Формуляр динамической балансировки ротора генератора
Турбоагрегат ст. N ____ Электростанция ___________
Балансировка проводится по вертикальной вибрации подшипников
Балансировочная скорость 3000 об/мин
|
Наименование операции |
Сторона 1 - турбина |
Сторона 2 - возбудитель | ||||
|
Обозна- |
2 |
Угол, град |
Обозна- |
2 |
Угол, град | |
|
Первый пуск |
|
108 |
192 |
|
56 |
235 |
|
Симметричная составляющая |
|
77 |
207 |
|
77 |
207 |
|
Кососимметричная составляющая |
|
38 |
162 |
|
38 |
342 |
|
Установка пробных симметричных грузов |
|
1450 |
101 |
|
1450 |
101 |
|
Второй пуск с пробными симметричными грузами |
|
61 |
186 |
|
27 |
291 |
|
Выделение симметричных составляющих |
|
32 |
215 |
|
32 |
215 |
|
Подсчет уравновешивающих симметричных грузов |
|
47 |
23 |
|
47 |
23 |
|
|
|
1,65 |
5 |
|
1,65 |
5 |
|
|
|
2400 |
106 |
|
2400 |
106 |
|
Третий пуск с уравновешивающими грузами |
|
30 |
164 |
|
35 |
11 |
|
Выделение симметричных составляющих |
|
8,5 |
70 |
|
8,5 |
70 |
|
Выделение кососимметричных составляющих |
|
32 |
180 |
|
32 |
0 |
|
Подсчет корректирующих симметричных грузов |
|
39 |
41° |
|
39 |
41° |
|
|
|
0,82 |
174° |
|
0,82 |
174° |
|
|
|
950 |
113° |
|
950 |
113° |
|
|
|
780 |
107° |
|
780 |
107° |
|
|
|
2220 |
104° |
|
2220 |
104° |
|
|
|
200 |
316° |
|
200 |
136° |
|
Установка пробных кососимметричных грузов |
|
600 |
176° |
|
600 |
354° |
|
Четвертый пуск с пробными кососимметричными грузами |
|
12 |
177° |
|
8 |
151° |




При пуске без груза получены векторы вибрации опор:
![]() 108 мк, 192°;
108 мк, 192°; ![]() 56 мк, 235°.
56 мк, 235°.
Из анализа скоростных характеристик турбоагрегата и результатов измерений вибрации на рабочей скорости установлено, что основная неуравновешенность ротора соответствует первой форме. Поэтому сначала устраняются симметричные составляющие вибрации подшипников.
Согласно приложению 2 балансировочная чувствительность подшипников данного ротора к симметричным грузам ![]() 25 мк/кг.
25 мк/кг.
После разложения вибрации опор на симметричные и кососимметричные составляющие (см. рис.39, ![]() ) находим вес симметричных пробных грузов (на одну сторону ротора)
) находим вес симметричных пробных грузов (на одну сторону ротора)
![]() кг.
кг.
В качестве пробных грузов использована пара симметричных грузов весом 1,45 кг каждый. Пробные грузы установлены в плоскость расположения первой формы небаланса, которая была определена относительно "бьющих" точек концов ротора, отмеченных при прохождении первой критической скорости; угол сдвига фазы небаланса при этом принят 90°.
При пуске с пробными грузами получены векторы вибраций опор
![]() 61 мк, 186°;
61 мк, 186°; ![]() 27 мк, 291°.
27 мк, 291°.
Из полученных векторов выделены симметричные составляющие ![]() (см. рис.30, б) и графически определены векторы влияния пробных грузов
(см. рис.30, б) и графически определены векторы влияния пробных грузов ![]() , которые используются для подсчета симметричных уравновешивающих грузов:
, которые используются для подсчета симметричных уравновешивающих грузов:
 ; (101°+207°-23°+180°)=2,4 кг, 105°.
; (101°+207°-23°+180°)=2,4 кг, 105°.
При пуске с симметричными уравновешивающими грузами ![]() получены следующие значения векторов вибраций подшипников:
получены следующие значения векторов вибраций подшипников:
![]() 30 мк, 164°;
30 мк, 164°; ![]() 35 мк; 11°.
35 мк; 11°.
Разложение векторов вибрации на симметричные и кососимметричные составляющие показало (см. рис.39, в), что остаточная неуравновешенность в основном имеет составляющие кососимметричных форм.
Для уточнения величины остаточной симметричной составляющей небаланса проведены корректировочные подсчеты.
Симметричные составляющие вибрации при последнем пуске
![]() 8,5 мк, 70°;
8,5 мк, 70°; ![]() 8,5 мк, 70°.
8,5 мк, 70°.
Влияние груза ![]() на вибрацию опор характеризуется векторами
на вибрацию опор характеризуется векторами ![]() 39 мк, 41°.
39 мк, 41°.
Корректирующие симметричные грузы
 ; (113°+215°-41°+180°)=0,78 кг, 107°.
; (113°+215°-41°+180°)=0,78 кг, 107°.
Скорректированные симметричные уравновешивающие грузы
![]() 2,22 кг, 104°.
2,22 кг, 104°.
Таким образом, корректировка симметричных уравновешивающих грузов практически выразилась бы в небольшом уменьшении веса последних (на 200 г) без изменения их места установки, что при данном уровне вибрации не имеет практического значения.
Согласно приложению 2 коэффициент чувствительности опор к кососимметричным составляющим ![]() 50 мк/кг.
50 мк/кг.
Кососимметричные составляющие вибраций при последнем пуске равны:
![]() 32 мк, 180°;
32 мк, 180°; ![]() 32 мк, 0°.
32 мк, 0°.
Определяем величину пробных кососимметричных грузов
![]() кг.
кг.
Пуск с пробными кососимметричными грузами весом по 0,6 кг, плоскость действия которых составляет угол 75° с плоскостью установки симметричных уравновешивающих грузов (этот угол был определен на основании положения бьющей точки ротора на рабочей скорости), дал окончательно следующие значения вибрации:
![]() 12 мк, 177°;
12 мк, 177°; ![]() 8 мк, 151°.
8 мк, 151°.
На этом уравновешивание закончено.
В результате сложения симметричных и кососимметричных грузов на роторе окончательно установлены два груза
![]() 2,8 кг, 113°;
2,8 кг, 113°; ![]() 2,5 кг, 86°.
2,5 кг, 86°.
б) Уравновешивание ротора турбогенератора ТГВ-200.
|
Рабочая скорость вращения ротора |
3000 об/мин |
|
Первая критическая скорость по паспортным данным |
1350 об/мин |
|
Радиус установки грузов в балансировочных плоскостях |
420 мм |
|
Вес ротора |
47800 кг |
1. Определение нечувствительной скорости к симметричным грузам, помещаемым в балансировочные плоскости (![]() 8510 мм,
8510 мм, ![]() 1116 мм,
1116 мм, ![]() 0,131,
0,131, ![]() 1350 об/мин).
1350 об/мин).
По графику рис.13 находим, что нечувствительная скорость составляет около 2300 об/мин, т.е. отстоит далеко как от рабочей скорости, так и от первой критической. Следовательно, установка пробных и уравновешивающих грузов допустима в заводские балансировочные плоскости у торцов бочки ротора.
2. Снятие скоростной характеристики подшипников генератора по вертикальной вибрации до балансировки (рис.64).
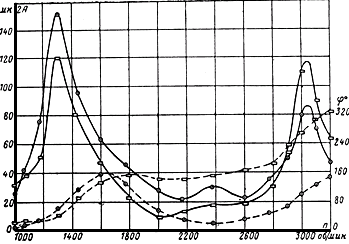
Рис.64. Скоростная характеристика подшипников по вертикальной вибрации
Как видно из полученного графика, на роторе имеется значительная неуравновешенность как первой, так и второй основных форм.
Первая критическая скорость наблюдается примерно при 1300 об/мин, а вторая находится несколько выше рабочей скорости.
Учитывая, что вибрация подшипников на первой критической скорости не превышает 200 мк, принимают решение начать балансировку на рабочей скорости вращения по вертикальной вибрации подшипников.
3. Уравновешивание на рабочей скорости вращения.
Первый пуск. Вертикальная вибрация подшипника 1 (сторона турбины) ![]() 80 мк;
80 мк; ![]() 100°; подшипника 2 (сторона возбудителя)
100°; подшипника 2 (сторона возбудителя) ![]() 110 мк;
110 мк; ![]() 270°.
270°.
Полученные данные записываются в формуляр N 1 балансировки и наносятся на диаграмму 1 (рис.65), по которой находят:
![]() 17 мк;
17 мк; ![]() 245°;
245°;![]() 95 мк.
95 мк.
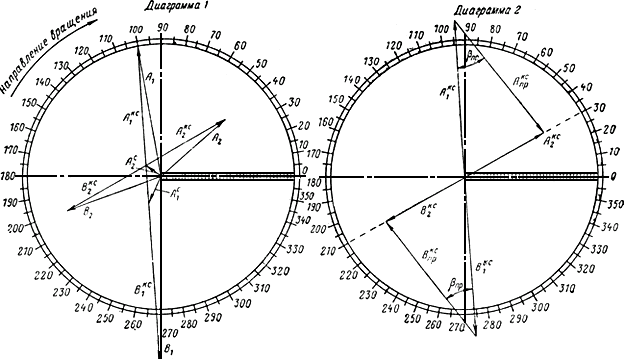
Рис.65. Построения при балансировке ротора по кососимметричной составляющей
Формуляр N 1 динамической балансировки ротора генератора
Турбоагрегат ст. N ______ Электростанция _____________
Балансировка проводится по вертикальной вибрации подшипников
Балансировочная скорость 3000 об/мин
|
Наименование операции |
Сторона 1 - турбина |
Сторона 2 - возбудитель | ||||
|
Обозна- |
2 |
Угол, град |
Обозна- |
2 |
Угол, град | |
|
Первый пуск |
|
80 |
100 |
|
110 |
270 |
|
Выделение симметричной составляющей |
|
17 |
248 |
|
17 |
248 |
|
Выделение кососимметричной составляющей |
|
95 |
94 |
|
95 |
274 |
|
Установка пробных кососимметричных грузов |
|
900 |
190 |
|
900 |
10 |
|
Второй пуск с пробными кососимметричными грузами |
|
50 |
40 |
|
60 |
200 |
|
Выделение кососимметричной составляющей |
|
55 |
30 |
|
55 |
210 |
|
Подсчет уравновешивающих кососимметричных грузов |
|
87 |
308 |
|
87 |
128 |
|
|
|
1,09 |
326 |
|
1,09 |
146 |
|
|
|
982 |
156 |
|
982 |
336 |
|
Третий пуск с уравновешивающими грузами |
|
1000 |
156 |
|
1000 |
336 |
|
|
10 |
255 |
|
15 |
40 | |


Значения ![]() и
и ![]() переносят на диаграмму 2 (рис.65) и находим
переносят на диаграмму 2 (рис.65) и находим ![]() 94°,
94°, ![]() 276°.
276°.
Выбор и установка пробных грузов. Исходя из чувствительности системы ротор-опоры к кососимметричным грузам на рабочей скорости вращения, принимают ![]() 106 мк/кг и подсчитывают вес пробного груза
106 мк/кг и подсчитывают вес пробного груза
 кг.
кг.
Найденные грузы устанавливают в балансировочные плоскости ротора (по 0,9 кг). Углы установки грузов выбирают с отставанием на 90° от "бьющей" точки, найденной по вибрации подшипников,
![]() 184° и
184° и ![]() 4°.
4°.
Для удобства расположения грузы устанавливают
|
со стороны турбины |
под углом 190°, | |
|
со стороны возбудителя |
" " |
10° (по разметке на торцах ротора). |
Второй пуск с пробными кососимметричными грузами.
На рабочей скорости вращения вибрация
подшипника 1 ![]() 50 мк;
50 мк; ![]() 40°;
40°;
подшипника 2 ![]() 60 мк,
60 мк, ![]() 200°.
200°.
Результаты измерений вписываются в формуляр 1 балансировки и наносятся на диаграмму 1 (рис.65). Находят:
![]() 11 мк,
11 мк, ![]() 147°;
147°;![]() 55 мк.
55 мк.
Значения кососимметричной вибрации переносят на диаграмму 2 (рис.65) и находят:
![]() 30°;
30°; ![]() 210°, а также
210°, а также ![]() 87 мк;
87 мк; ![]() 308°;
308°;![]() 87 мк;
87 мк; ![]() 128°;
128°; ![]() 35°.
35°.
По результатам построения подсчитывают вес уравновешивающих кососимметричных грузов и место их установки
 кг;
кг; ![]() 190-35=155°;
190-35=155°;![]() (10+360)-35=335°.
(10+360)-35=335°.
Пуск с уравновешивающими кососимметричными грузами.
На рабочей скорости вращения вибрация
подшипника 1 ![]() 10 мк;
10 мк; ![]() 225°;
225°;
подшипника 2 ![]() 15 мк;
15 мк; ![]() 40°.
40°.
По полученным результатам принимают, что ротор на рабочей скорости уравновешен, и переходят к балансировке на первой критической скорости, поскольку вибрация на этой скорости сохраняется повышенной.
4. Уравновешивание на первой критической скорости.
Первый пуск. Вертикальная вибрация при 1300 об/мин:
подшипника 1 ![]() 150 мк;
150 мк; ![]() 60°;
60°;
подшипника 2 ![]() 120 мк;
120 мк; ![]() 40°.
40°.
Полученные данные заносятся в формуляр N 2 балансировки и диаграмму (рис.66). По построению находят:
![]() 133 мк;
133 мк; ![]() 52°.
52°.
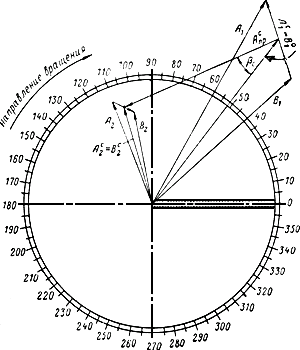
Рис.66. Построения при балансировке ротора по симметричной составляющей
Формуляр N 2 динамической балансировки ротора генератора
Турбоагрегат ст. N ______ Электростанция _____________
Балансировка проводится по вертикальной вибрации подшипников
Балансировочная скорость 1300 об/мин
|
Наименование операции |
Сторона 1 - турбина |
Сторона 2 - возбудитель | ||||
|
Обозна- |
2 |
Угол, град |
Обозна- |
2 |
Угол, град | |
|
Первый пуск |
|
150 |
60 |
|
120 |
40 |
|
Выделение симметричной составляющей |
|
133 |
52 |
|
133 |
52 |
|
Выделение кососимметричной составляющей |
|
- |
- |
|
- |
- |
|
Установка пробных симметричных грузов |
|
2100 |
110 |
|
2100 |
110 |
|
Второй пуск с пробными симметричными грузами |
|
70 |
110 |
|
60 |
100 |
|
Выделение симметричной составляющей |
|
65 |
105 |
|
65 |
105 |
|
Подсчет уравновешивающих симметричных грузов |
|
110 |
217 |
|
110 |
217 |
|
|
|
1,21 |
15 |
|
1,21 |
15 |
|
|
|
2550 |
125 |
|
2550 |
125 |
|
Третий пуск с уравновешивающими грузами |
|
2550 |
140 |
|
2500 |
140 |
|
|
20 |
110 |
|
25 |
130 | |
Выбор и установка пробных симметричных грузов. Принимают чувствительность системы ротор-опоры к симметричным грузам на первой критической скорости ![]() 44 мк/кг, находят вес пробных симметричных грузов:
44 мк/кг, находят вес пробных симметричных грузов:
 кг.
кг.
Считая, что "бьющая" точка отстает от небаланса на роторе на угол 90°, и принимая во внимание поправку на показания прибора, находят угол установки груза:
![]() 110° (по разметке ротора).
110° (по разметке ротора).
Второй пуск с пробными симметричными грузами.
Вертикальная вибрация при 1300 об/мин:
подшипника 1 ![]() 70 мк;
70 мк; ![]() 110°;
110°;
подшипника 2 ![]() 60 мк;
60 мк; ![]() 100°.
100°.
В результате построения (диаграмма на рис.66) находят:
![]() 65 мк;
65 мк; ![]() 105°;
105°;![]() 110;
110; ![]() 217°;
217°; ![]() 30°.
30°.
Согласно полученным данным, вес уравновешивающих грузов будет равен:
 кг
кг
и угол их установки
![]() 110+30=140°.
110+30=140°.
Пуск с пробными симметричными грузами показал, что с приближением скорости вращения к рабочей усиливается синфазная вибрация подшипников. Поэтому симметричные грузы перенесены из балансировочных плоскостей на бочку ротора с распределением их равномерно по всей длине бочки.
Расчет показал, что вес равномерно распределенного груза должен быть равен 3,9 кг вместо 2,55х2=5,1 кг суммарного веса симметричных грузов в балансировочных пазах ротора (угол установки 140°).
Третий пуск с уравновешивающими симметричными грузами, распределенными по бочке ротора.
Вибрация при 1300 об/мин:
подшипника 1 ![]() 20 мк;
20 мк; ![]() 110°;
110°;
подшипника 2 ![]() 25 мк;
25 мк; ![]() 130°.
130°.
На критической скорости, при медленном ее переходе в процессе разворота агрегата и на выбеге, а также на рабочей скорости вращения существенного увеличения вибрации не наблюдается, ротор достаточно уравновешен во всем диапазоне скоростей вращения.
в) Уравновешивание ротора турбогенератора ТВ-100-2 с компенсацией тепловой разбалансировки. Рабочая, первая и вторая критические скорости вращения соответственно равны: ![]() 3000,
3000, ![]() 750,
750, ![]() 1900 об/мин.
1900 об/мин.
Радиус балансировочного паза на торце бочки ![]() 420 мм. Вес ротора
420 мм. Вес ротора ![]() 46 т.
46 т.
1) Производится первый пуск агрегата. Измеряется вибрация подшипников холодного ротора на холостом ходу при первой критической (790 об/мин) и рабочей (3000 об/мин) скоростях вращения. Данные приведены в журнале измерений, пуск I. Генератор заполнен водородом.
Журнал измерений при балансировке
Турбогенератор ________ ТВ-100-2, ст. N ________ Электростанция __________
|
Но- |
Режим и время |
Установ- |
|
Вибрация, мк/град | ||||||||
|
Подшипник 6 |
Подшипник 5 |
Подшипник 4 | ||||||||||
|
Верти- |
Попе- |
Про- |
Верти- |
Попе- |
Про- |
Верти- |
Попе- |
Про- | ||||
|
I |
Холостой ход |
790 |
90/33 |
- |
- |
66/25 |
- |
- |
70/20 |
- |
- | |
|
14/IX 1959 г. |
Без грузов |
3000 |
15/90 |
10/- |
30/100 |
32/110 |
15/190 |
10/- |
20/0 |
30/300 |
15/270 | |
|
|
" |
3000 |
60/135 |
38/175 |
110/140 |
85/120 |
52/215 |
35/295 |
25/20 |
55/320 |
35/295 | |
|
II |
|
" |
3000 |
15/320 |
15/310 |
17/0 |
15/325 |
10/300 |
35/280 |
25/- |
45/- |
20/- |
|
III |
Холостой ход 14/IX 1959 г. |
|
790 |
98/95 |
- |
- |
75/88 |
- |
- |
80/85 |
- |
- |
|
|
3000 |
32/215 |
- |
- |
47/200 |
- |
- |
- |
- |
- | ||
|
IV |
Холостой ход 14/IX 1959 г. 15°° |
|
790 |
57/332 |
- |
- |
30/313 |
- |
- |
40/320 |
- |
- |
|
|
3000 |
22/315 |
17/15 |
25/333 |
27/300 |
33/345 |
32/190 |
20/- |
27/- |
25/- | ||
|
V |
|
|
3000 |
15/320 |
15/310 |
17/0 |
15/325 |
10/300 |
25/280 |
20/- |
45/- |
20/- |
|
VI |
|
|
3000 |
16/150 |
12/210 |
20/160 |
22/166 |
20/280 |
20/130 |
25/- |
40/- |
22/- |
2) При том же первом пуске измеряется вибрация подшипников ротора, нагретого при водородном охлаждении до номинальной температуры меди 130°.
Вытесняется водород, и при пуске II измеряется вибрация при охлаждении генератора воздухом и температуре 120 °С (журнал измерений, пуск II).
Поскольку измерения при пусках I и II дают различные результаты, за исходный режим для уравновешивания принимают режим номинальной нагрузки с током ротора ![]() 600 А при охлаждении генератора водородом.
600 А при охлаждении генератора водородом.
Расчет уравновешивающих грузов ведется по двойной амплитуде (размаху) вертикальной вибрации подшипников.
3) На балансировочную диаграмму 1 (рис.67) наносятся измерения векторов вертикальной вибрации ![]() - подшипника со стороны турбины (сторона 1) и
- подшипника со стороны турбины (сторона 1) и ![]() - подшипника со стороны контактных колец (сторона 2) при 3000 об/мин, полученные при вращении нагретого ротора во время пуска I,
- подшипника со стороны контактных колец (сторона 2) при 3000 об/мин, полученные при вращении нагретого ротора во время пуска I,
![]() 85 мк/120°,
85 мк/120°, ![]() 60 мк/135°,
60 мк/135°,
и холодного ротора на холостом ходу во время пуска I
![]() 32 мк/110°,
32 мк/110°, ![]() 15 мк/90°.
15 мк/90°.
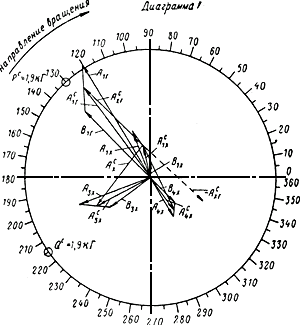
Рис.67. Векторная диаграмма уравновешивания ротора на рабочей скорости (3000 об/мин)
Из векторов вибрации пуска I выделяются соответственно симметричные составляющие вибрации.
Построение на диаграмме 1 (рис.67):
![]() 72 мк/127°;
72 мк/127°;![]() 23 мк/105°.
23 мк/105°.
Кососимметричные составляющие векторов вибрации ввиду их незначительной величины при уравновешивании не выделяются и не учитываются.
4) Определяется вектор симметричной составляющей вибрации, вызванный тепловой неуравновешенностью ротора.
Векторное построение производится на диаграмме 1 (рис.67):
![]() 52 мк/138°.
52 мк/138°.
Из конца вектора ![]() строим вектор теплового влияния с обратным знаком
строим вектор теплового влияния с обратным знаком ![]() 52 мк/318°.
52 мк/318°.
Ввиду того, что вибрация холодного ротора находится в допустимых пределах, задача уравновешивания состоит в том, чтобы соответствующим выбором величины и места установки уравновешивающих грузов на роторе:
компенсировать вектор вибрации ![]() 52 мк/138°, вызванный тепловой составляющей небаланса;
52 мк/138°, вызванный тепловой составляющей небаланса;
при этом не увеличить амплитуды колебаний подшипников холодного ротора на рабочей скорости;
сохранить в допустимых пределах амплитуды колебаний подшипников вблизи первой критической скорости вращения.
Из диаграммы 1 видно, что первые два условия можно достичь, подобрав систему симметричных грузов 2![]() , вектор влияния которых будет равен или близок вектору тепловой неуравновешенности с обратным знаком
, вектор влияния которых будет равен или близок вектору тепловой неуравновешенности с обратным знаком ![]() 52 мк/318°.
52 мк/318°.
В соответствии с балансировочной чувствительностью подшипников ротора ТВ-100-2 к симметричной вибрации при 3000 об/мин, выбранной по приложению 2, определяем величину пробной пары симметричных грузов
![]() кг.
кг.
5) На роторе устанавливаются пробные симметричные грузы ![]() весом по 1,9 кг каждый под углом 130° от начального радиуса. Наносят положение грузов на балансировочную диаграмму 1.
весом по 1,9 кг каждый под углом 130° от начального радиуса. Наносят положение грузов на балансировочную диаграмму 1.
Производят пуск III ротора в режиме холостого хода и измеряют векторы вибрации подшипников при 790 и 3000 об/мин. Измеренные величины амплитуд и фаз колебаний заносят в журнал измерений (пуск III), а векторы вертикальной вибрации подшипников холодного ротора при 3000 об/мин ![]() и
и ![]() наносят на диаграмму 1.
наносят на диаграмму 1.
Векторные построения выполняются на диаграмме 1.
Выделяют симметричную составляющую векторов колебаний подшипников ротора данного пуска
![]() (32 мк/215°+47 мк/200°)=40 мк/217°.
(32 мк/215°+47 мк/200°)=40 мк/217°.
Строят вектор влияния, вызванный установкой 2![]() ,
,
![]() 40 мк/217°-23 мк/105°=50 мк/233°.
40 мк/217°-23 мк/105°=50 мк/233°.
Затем вычисляют величину и место установки уравновешивающих грузов, компенсирующих вектор влияния теплового небаланса:
 .
.
Вес уравновешивающего груза можно оставить без изменения, переместив его на 85° против направления вращения: из отметки 130 в отметку 215° (диаграмма 1). Этим мы должны удовлетворить поставленным выше в п.4 двум первым условиям.
Выясняют, удовлетворит ли это третьему условию: сохранится ли в допустимых пределах вибрация подшипников вблизи первой критической скорости. Для этого производят векторные построения на диаграмме 2 (рис.68). Наносят на диаграмму 2 из журнала наблюдений векторы вибрации подшипников ![]() и
и ![]() при 790 об/мин, измеренные во время пусков I и III, на холодном роторе.
при 790 об/мин, измеренные во время пусков I и III, на холодном роторе.

Рис.68. Векторная диаграмма уравновешивания ротора на первой критической скорости (790 об/мин)
Выделяют из векторов вибрации симметричные составляющие
![]() и
и ![]() .
.
Строят вектор влияния от установки грузов 2![]()
![]() мк/145°.
мк/145°.
Из диаграммы 2 видно, что принятое решение о сохранении ![]() 1,9 кг и поворот его против направления вращения относительно места установки на 85° должны снизить амплитуды колебаний подшипников при 790 об/мин.
1,9 кг и поворот его против направления вращения относительно места установки на 85° должны снизить амплитуды колебаний подшипников при 790 об/мин.
7) Производится пуск IV ротора в режиме холостого хода и измерение векторов колебаний подшипников при 790 и 3000 об/мин. Результаты измерений записываются в журнал измерений (пуск IV) и наносятся на соответствующие диаграммы.
Векторное построение на диаграмме 1 (3000 об/мин).
Строят вектор влияния от установки груза ![]() 1,9 кг/215°
1,9 кг/215°
![]() мк/295°.
мк/295°.
Полученный вектор влияния ![]() 47 мк/295° близок по величине и направлению к вектору теплового небаланса с обратным знаком
47 мк/295° близок по величине и направлению к вектору теплового небаланса с обратным знаком ![]() 52 мк/318° (диаграмма 1).
52 мк/318° (диаграмма 1).
Двойные амплитуды вибрации подшипников генератора при 790 об/мин не превышают допустимых величин (см. диаграмму 2). Увеличения вибрации других подшипников турбоагрегата не наблюдается (см. журнал измерений).
После измерений, построений и анализа результатов симметричные грузы ![]() кг/215° окончательно закрепляются в пазах и стопорятся.
кг/215° окончательно закрепляются в пазах и стопорятся.
8) Производится сборка торцовых щитов и водородных уплотнений турбогенератора и проверка вибрационного состояния подшипников при вращении нагретого до номинальной температуры ротора под нагрузкой в двух режимах: на воздухе и водороде. Результаты измерений заносятся в журнал измерений (пуски V и VI).
Измерения показывают, что вибрация подшипников ротора генератора и других подшипников турбоагрегата в результате тепловой балансировки снижена и не превышает величин, допустимых нормами. Тепловая балансировка ротора генератора закончена.
Текст документа сверен по:
/ Министерство энергетики и электрификации СССР;
Техническое управление по эксплуатации энергосистем. -
М.: "Энергия", 1967