ГОСТ Р МЭК 870-3-93
Группа П77
ГОСУДАРСТВЕННЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
УСТРОЙСТВА И СИСТЕМЫ ТЕЛЕМЕХАНИКИ
Часть 3. Интерфейсы (электрические характеристики)
Telecontrol equipment and systems
Part 3. Interfaces (electrical characteristics)
ОКП 42 3200
Дата введения 1995-01-01
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. РАЗРАБОТАН И ВНЕСЕН Министерством топлива и энергетики Российской Федерации
РАЗРАБОТЧИКИ:
Ц.Е.Геронимус (руководитель темы); К.Г.Митюшкин, д-р техн. наук
2. УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 30.12.93 N 309
Настоящий стандарт содержит полный аутентичный текст международного стандарта МЭК 870-3-89 "Устройства и системы телемеханики. Часть 3. Интерфейсы (электрические характеристики)"
3. ВВЕДЕН ВПЕРВЫЕ
4. ССЫЛОЧНЫЕ И НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
|
Обозначение отечественного НТД, на который дана ссылка |
Обозначение соответствующего международного стандарта |
Пункт, подпункт, в котором приведена ссылка |
|
- |
7.2 | |
|
- |
6.1.3. | |
|
- |
6.1.3. | |
|
ГОСТ 27918-88 |
МЭК 255-4-76 |
4.1 |
|
МЭК 870-4-90 |
3.2.4; 4.1-4.3 | |
|
- |
Международный электротехнический словарь (МЭС) МЭК 50 (371) |
3.1.1.1; 3.1.1.2 |
|
- |
МЭК 495-74* |
6.2.2. |
|
- |
ИСО 2110-80* |
6.1.3 |
|
- |
ИСО 4902-80* |
6.1.3 |
_______________
* До прямого применения международного стандарта в качестве государственного стандарта он может быть приобретен в фонде ИНТД ВНИИКИ Госстандарта России.
1. ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт распространяется на вновь разрабатываемые устройства и системы телемеханики с передачей информации кодированной последовательностью бит для контроля и управления территориально распределенными процессами.
2. ОБЪЕКТ СТАНДАРТИЗАЦИИ
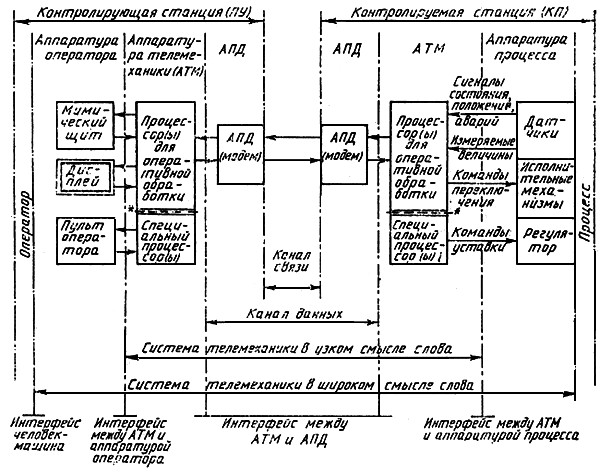
Настоящий стандарт устанавливает электрические характеристики интерфейсов (сигналы, сопротивления и т.п.) на границах между (черт.1):
аппаратурой телемеханики и внешним оборудованием, подсоединенным к:
аппаратуре процесса (датчики, исполнительные механизмы);
аппаратуре оператора;
аппаратурой телемеханики и каналом передачи. Оконечное устройство передачи данных (например, АПД - модем) может быть или не быть частью аппаратуры телемеханики;
различными частями аппаратуры внутри системы телемеханики и аппаратуры обработки данных.
Интерфейсы между модулями в типовой системе телемеханики
_______________
* Необязательный интерфейс между процессором (процессорами) аппаратуры телемеханики и специальным процессором или другой аппаратуры обработки данных, например печатающим устройством.
Черт.1
|
Примечание. |
АПД - оконечное устройство передачи данных (модем); |
|
|
ATM - оконечная аппаратура данных (аппаратура телемеханики). |
Интерфейсы определяются независимо от функционального назначения системы или ее подсистем.
Информация в этой части относится только к рабочим условиям.
В настоящем стандарте не установлены требования к:
интерфейсу между внешним источником питания и аппаратурой телемеханики;
логическим интерфейсам и протоколам интерфейса;
условиям и процедурам испытаний интерфейса.
3. ТИПЫ ИНФОРМАЦИИ
В интерфейсах используются два основных типа информации: цифровая и аналоговая.
Оба типа информации представлены в интерфейсах при помощи сигналов в параллельной, последовательной форме или в форме одиночных сигналов.
В табл.1 приведены примеры соотношений между сигналами и типами информации.
Таблица 1
|
Тип сигнала |
Вид сигнала |
Тип информации |
|
Цифровой |
Одно- или двухэлементный |
Сигналы аварий, сигналы положения выключателя и разъединителя. |
|
|
|
Сигналы счетчика измерения энергии. |
|
|
|
Команды на переключение |
|
|
Многоэлементный (параллельный код) |
Положение отпаек трансформатора. |
|
|
Многоэлементный (последовательный код) |
Измеряемые величины. |
|
|
|
Команды задания уставки. |
|
|
|
Специально кодированные данные |
|
Аналоговый |
Непрерывная переменная |
Измеряемые величины. |
|
|
|
Значения заданных уставок |
Каждый из этих сигналов может быть использован как на входе, так и на выходе. Входной сигнал представляет информацию, генерируемую вне аппаратуры, которая включает рассматриваемый интерфейс. В противном случае это выходной сигнал.
3.1.Цифровая информация
Цифровая информация характеризует состояния, изменяющиеся дискретно. Информация может проходить через интерфейс в параллельной или последовательной форме.
3.1.1. Типы цифровой информации (примеры)
3.1.1.1. Одноэлементная информация
Одноэлементная информация (по МЭС* 371-02-07) формируется однобитным двоичным источником информации, например сигнальным контактом с двумя определенными состояниями. Эта информация передается интерфейсу через одну из двух позиций двоичного сигнала.
______________
* Международный электротехнический словарь - МЭК 50 (часть 371).
3.1.1.2. Двухэлементная информация
Источники двухбитной информации, такие как контакты выключателей или разъединителей, выдают двухэлементную информацию (по МЭС 371-02-08). На интерфейс подается информация в виде пары двоичных сигналов.
Два состояния, представленные парой бит 01 или 10, характеризуют два определенных положения (вкл/выкл или выкл/вкл), в то время как пары 00 и 11 характеризуют два неопределенных положения (вкл/вкл или выкл/выкл), которые указывают либо на промежуточное состояние (по МЭС 371-02-09), либо на ошибочное состояние (по МЭС 371-02-10), либо на повреждение цепи.
3.1.1.3. Многоэлементная информация (кодированная информация)
Источники цифровой информации, которые требуют кодированных сигналов (например положение отпаек трансформатора, показания приборов и команды уставок).
Информация может передаваться соответствующими сигналами в параллельной или последовательной форме.
3.1.2. Представление цифровой информации
Цифровая информация представляется индивидуальными двоичными сигналами в виде двух различных уровней.
3.1.2.1. Уровни сигналов
Уровень сигналов может занимать различные области, приведенные на черт.2.
Уровни двоичных сигналов
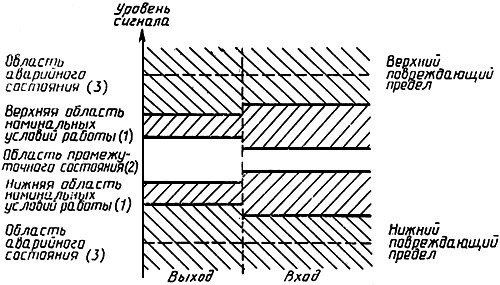
Черт.2
Область (1) - номинальная.
Номинальные условия работы аппаратуры;
область (2) - промежуточная.
Переходная область между верхним и нижним пределами от номинального (1). Если сигнал существует в этой области дольше заранее установленного времени, то считается, что появилось повреждение;
область (3) - аварийное состояние.
Условия работы, которые могут вызвать повреждение аппаратуры. Если уровень сигнала выйдет за верхний и нижний опасные пределы, то может появиться устойчивое повреждение.
Чтобы обеспечить правильное взаимодействие аппаратуры, номинальная область выходных сигналов должна быть меньше, чем номинальная область входных сигналов.
3.1.2.2. Длительность сигнала
Длительность двоичных сигналов может быть разделена на две категории:
а) когда источник двоичной информации управляет двумя номинальными уровнями дискретного сигнала определенной длительности, например:
генератор в работе (включен) - уровень сигнала  (высокий);
(высокий);
генератор выключен - уровень сигнала  (низкий);
(низкий);
б) когда изменение состояния источника двоичной информации вызывает импульсный сигнал.
Импульсный сигнал принимает на определенное время один из двух номинальных уровней. Он используется для характеристики источников информации о приращении или о кратковременном состоянии.
Например, опрос информации о кратковременном состоянии (по МЭС 371-02-11), информации о приращении (по МЭС 371-02-06) или выход импульсной команды (по МЭС 371-03-04).
3.1.3. В соответствии с черт.3 определяются параметры двоичных сигналов - длительность, время восстановления и переходное время.
Параметры двоичных сигналов
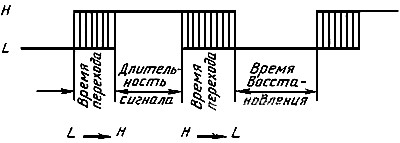
Черт.3
3.1.4. Спецификации
Спецификации для двоичных сигналов приведены в разд.4-7.
Основные данные:
номинальные уровни (напряжение или ток);
расположение и полное сопротивление генерирующей цепи (внутри или вне аппаратуры);
форма импульсов (уровень, время перехода, длительность, полярность, остаточная пульсация);
тип гальванической развязки и предельные напряжения помех (нормального вида, общего вида).
3.2. Аналоговая информация
3.2.1. Представление аналоговой информации
Аналоговый сигнал связан с величиной, которая может изменяться между заранее установленными значениями. Например, диапазон изменения сигнала от 0 до 10 мА соответствует изменению величины источника информации в диапазоне от 0 до 130 кВ.
3.2.2. Одно- и двухполярные сигналы
Рассматриваются два вида аналоговых сигналов:
однополярные:
изменяющаяся величина имеет только одну полярность (например напряжение).
Сигнал может быть только одной полярности (например от 0 до 4 мА или от 4 до 20 мА);
двухполярные:
изменяющаяся величина может иметь положительную или отрицательную полярность (например переток).
Сигнал может быть как положительной, так и отрицательной полярности (например от минус 5 мА до плюс 5 мА).
3.2.3. Уровни сигнала
Аналоговый сигнал может иметь две области, которые представлены на черт.4.
Уровни аналоговых сигналов
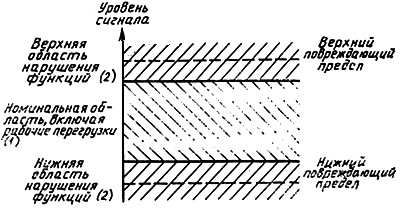
Черт.4
Область (1) - номинальная.
Нормальные условия работы аппаратуры, включая возможные рабочие перегрузки;
область (2) - область нарушения функций.
Условия, которые могут вызвать нарушение функций аппаратуры. Если уровень сигнала достигает верхнего или нижнего повреждающего предела, может произойти устойчивое повреждение аппаратуры.
3.2.4. Спецификации
Спецификации для аналоговых сигналов приведены в разд.4-7.
Основные данные:
пределы диапазона (напряжение и ток);
сопротивление нагрузки (максимальное для тока, минимальное для напряжения);
тип гальванической развязки и пределы напряжений помех (нормального вида и общего вида). Ни точность, ни полоса частот сигнала (например скорость изменения) не устанавливаются, так как они являются техническими характеристиками в соответствии с ГОСТ Р МЭК 870-4-93.
4. ИНТЕРФЕЙС МЕЖДУ АППАРАТУРОЙ ТЕЛЕМЕХАНИКИ И АППАРАТУРОЙ ПРОЦЕССА
Данный интерфейс - линия связи, по которой информация передается между аппаратурой телемеханики и аппаратурой процесса на контролируемом пункте (КП).
Обмен информацией происходит при помощи двоичных или аналоговых сигналов. Информация, передаваемая от аппаратуры процесса к аппаратуре телемеханики - входная информация. Информация, передаваемая в обратном направлении, - выходная.
Рассматриваются четыре вида сигналов:
двоичные входные сигналы;
двоичные выходные сигналы;
аналоговые входные сигналы;
аналоговые выходные сигналы.
4.1. Основные характеристики
Следующая информация относится как к входным, так и к выходным сигналам.
В табл.2-4 приведены значения номинальных напряжений и классы токов для двоичных сигналов.
Таблица 2
Номинальные напряжения для двоичных сигналов
|
Характер значений |
Напряжение постоянного тока, В |
Напряжение переменного тока, В |
|
Предпочтительные значения |
12 |
- |
|
24 |
- | |
|
|
48 |
- |
|
|
60 |
- |
|
Нерекомендуемые значения |
5 |
24 |
|
|
|
48 |
|
|
110 |
110 |
|
|
220 |
220 |
Примечание. Для пассивного двоичного входа номинальные напряжения ( ) могут быть определены по согласованию между изготовителем и пользователем.
) могут быть определены по согласованию между изготовителем и пользователем.
Таблица 3
Классы токов для двоичных входных сигналов
|
|
Двоичные входные сигналы постоянного и переменного тока, мА | |
|
|
мин. |
макс. |
|
1 |
1 |
5 |
|
2 |
5 |
10 |
|
3 |
10 |
50 |
|
4 |
50 |
- |
Примечание. Изготовитель должен указать рабочий ток при номинальном напряжении () и влияние допускаемых отклонений напряжения.
Таблица 4
Классы токов для двоичных выходных сигналов
|
|
Двоичные выходные сигналы | |||
|
|
Постоянный ток, А |
Переменный ток, А | ||
|
|
мин. |
макс. |
мин. |
макс. |
|
1 |
- |
0,1 |
- |
0,2 |
|
2 |
0,05 |
0,5 |
0,1 |
1,0 |
|
3 |
0,10 |
1,0 |
0,2 |
2,0 |
|
4 |
0,25 |
2,5 |
0,5 |
5,0 |
Примечания:
1. Изготовитель должен указать рабочий ток при номинальном напряжении () и влияние допускаемых отклонений напряжения.
2. Пределы приведенных классов могут быть при необходимости расширены. Для этого используют дополнительно подключенное оборудование.
В табл.5 приведены номинальные значения токов и напряжений для аналоговых сигналов.
Таблица 5
Номинальные значения аналоговых сигналов
|
Характер значений |
Значение тока, мА |
Значение напряжения, В |
|
Предпочтительные значения |
От 0 до 5 |
- |
|
|
" 0 " 10 |
- |
|
|
" 4 " 20 |
- |
|
±5 |
- | |
|
|
±10 |
- |
|
Нерекомендуемые значения |
От 0 до 1 |
От 0 до 1 |
|
" 0 " 2,5 |
" 0 " 5 | |
|
|
" 0 " 20 |
" 0 " 10 |
|
|
±1 |
±1 |
|
|
±2,5 |
±5 |
|
|
±20 |
±10 |
Примечание. Значения пульсаций устанавливают по согласованию между изготовителем и пользователем.
Предельные значения напряжений помех и требования к изоляции для двоичных и аналоговых сигналов приведены в табл.6 и 7.
Эти напряжения указывают пределы, в которых аппаратура:
а) продолжает правильно работать (рабочие пределы);
б) не повреждается (пределы повреждения).
Таблица 6
Пределы помех по напряжению и требования к изоляции для двоичных сигналов
|
Показатели |
Помехи нормального вида |
Помехи общего вида |
|
Рабочие пределы |
10% двойной амплитуды номинального напряжения промышленной частоты |
25 В переменного тока |
|
|
65 В постоянного тока | |
|
|
0,2 кВ OSC* |
0,3 кВ OSC |
|
0,3 кВ IMP* |
0,5 кВ IMP | |
|
Пределы повреждений для класса 1 |
+200% от |
0,5 кВ PF* |
|
|
-125% от |
0,5 кВ ОSС |
|
200% от |
1,0 кВ IMP | |
|
0,3 кВ OSC |
||
|
|
0,5 кВ IMP |
|
|
Пределы повреждений для класса 2 |
+200% от |
0,5 кВ PF |
|
|
-125% от |
1,0 кВ ОSС |
|
200% от |
2,5 кВ IMP | |
|
0,5 кВ OSC |
||
|
|
1,0 кВ IMP |
|
|
Пределы повреждений для класса 3 |
+200% от |
2,5 кВ PF |
|
|
-125% от |
2,5 кВ ОSС |
|
200% от |
5,0 кВ IMP | |
|
1,0 кВ OSC |
||
|
|
2,5 кВ IMP |
|
|
Изоляция между любой парой входов или выходов и землей |
- |
Минимальные значения: |
|
|
a) 1 МОм при 500 В переменного тока | |
|
|
|
б) 10 МОм при 500 В переменного тока |
|
|
|
в) 100 МОм при 500 В |
_______________
* PF - промышленная частота (50/60 Гц) - по ГОСТ 27918.
OSC - затухающая синусоида волны колебаний - по ГОСТ 27918.
IMP - одиночный импульс высокого напряжения - по ГОСТ 27918.
** Аппаратура должна выдерживать без повреждений указанные значения напряжения не менее 1 с.
*** Аппаратура должна выдерживать без повреждений указанные значения напряжения не менее 1 мин.
 Для общего применения.
Для общего применения.
 Для специального применения.
Для специального применения.
Таблица 7
Пределы помех по напряжению и требования к изоляции для аналоговых сигналов
|
Показатели |
Помехи нормального вида |
Помехи общего вида |
|
Пределы повреждений для класса 1 |
±50 мА постоянного тока* |
25 В переменного тока |
|
|
±24 В постоянного тока* |
65 В постоянного тока |
|
|
0,2 кВ OSC |
1,0 кВ OSC |
|
|
0,3 кВ IMP |
2,0 кВ IMP |
|
Пределы повреждений для класса 2 |
±50 мА постоянного тока* |
±0,5 кВ постоянного тока |
|
|
±24 В постоянного тока* |
0,5 кВ PF |
|
|
0,5 кВ OSC |
1,0 кВ OSC |
|
|
1,0 кВ IMP |
2,0 кВ IMP |
|
Изоляция между любой парой входов или выходов и землей |
- |
Минимальные значения: |
|
|
|
а) 1 МОм при 500 В**; |
|
|
|
б) 10 МОм при 500 В***; |
|
|
|
в) 100 МОм при 500 В*** |
_______________
* Аппаратура должна выдерживать без повреждений указанные значения напряжений и тока не менее 1 мин.
** Для общего применения.
*** Для специального применения.
Примечание. Для рабочих пределов требования установлены в ГОСТ Р МЭК 870-4-93, в котором приведены зависимости между точностью, рабочими пределами и характеристиками аппаратуры.
Если входы и выходы аппаратуры не изолированы от земли, может существовать только напряжение помех нормального вида.
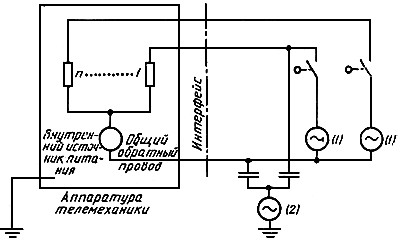
4.2. Двоичные входные сигналы
Двоичные входные сигналы делятся на две основные категории:
а) активные - источники питания сигнала находятся вне аппаратуры телемеханики. Эти сигналы подаются в аппаратуру телемеханики в виде напряжения постоянного тока относительно общего обратного провода (черт.5а);
б) пассивные - источник питания сигнала находится внутри аппаратуры телемеханики. Эти сигналы подаются в аппаратуру телемеханики в виде контактов, размыкающих или замыкающих цепи определенного сопротивления (черт.5б).
Для надежной работы должно быть установлено значение тока, протекающего через контакты и нагрузку.
Схемы для двоичных входных сигналов
а) схема для активных двоичных входных сигналов

(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.5а
б) схема для пассивных двоичных входных сигналов
(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.5б
Данные о двоичных входных сигналах приведены в табл.8 и 9.
Таблица 8
Активные двоичные входные сигналы (черт.5а)
|
Характеристика |
Значение сигнала |
Примечание |
|
Сигнал низкого уровня - |
Минимальное: - 5% от номинального значения напряжения ( |
Диапазоны сигналов включают изменение напряжения частоты питания |
|
|
Номинальное: 0% от номинального значения напряжения ( |
|
|
|
Максимальное: +15% от номинального значения напряжения ( |
|
|
1 макс. 0,2 мА |
||
|
Сигнал высокого уровня - |
Минимальное: +75% от номинального значения напряжения ( |
|
|
Номинальное: +100% от номинального значения напряжения ( |
| |
|
|
Максимальное: ±125% от номинального значения напряжения ( |
|
|
Для классов тока - по табл.3 |
||
|
Продолжительность (длительность) сигнала (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время восстановления (по черт.3) |
Минимальное: 10 мс (3 мс - для cпeциального применения) |
- |
|
Время перехода |
Максимальное: 8 мс (1 мс - для специального применения) |
Кроме указанного - по ГОСТ Р МЭК 870-4-93 |
 и
и  (по черт.3)
(по черт.3)
Таблица 9
Пассивные двоичные входные сигналы (черт.5б)
|
Характеристика сигнала и состояние цепи |
Значение сигнала и параметров цепи |
Примечание |
|
Разомкнутая цепь |
Минимальное: 50 кОм при номинальном значении напряжения ( |
|
|
|
Номинальное: |
|
|
|
|
|
|
Замкнутая цепь |
Минимальное: 0 Ом; |
- |
|
номинальное: 150 Ом |
||
|
Для классов тока - по табл.3 |
||
|
Длительность сигнала (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время восстановления (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время перехода |
Максимальное: 8 мс (1 мс - для специального применения) |
Кроме указанного - по ГОСТ Р МЭК 870-4-93 |
 Ом при номинальном значении напряжения (
Ом при номинальном значении напряжения ( 0,2 мА при значении напряжения, равном 125% от
0,2 мА при значении напряжения, равном 125% от
4.3. Двоичные выходные сигналы
Двоичные выходные сигналы делятся на две основные категории, а именно:
а) пассивные - источник питания цепи сигнала находится вне аппаратуры телемеханики. В этом случае сигнал выдается аппаратурой телемеханики замыканием или размыканием контакта цепи определенного сопротивления (черт.6а);
а) схема для пассивных двоичных выходных сигналов
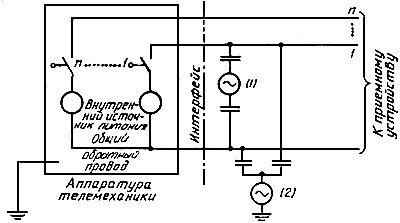
(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.6а
б) активные - источник питания цепи сигнала находится внутри аппаратуры телемеханики (черт.6б).
б) схема для активных двоичных выходных сигналов

(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.6б
Данные о двоичных выходных сигналах приведены в табл.10 и 11.
Таблица 10
Пассивные двоичные выходные сигналы (черт.6а)
|
Характеристика сигнала и состояние цепи |
Значение сигнала и параметров цепи |
Примечание |
|
Разомкнутая цепь |
Минимальное: 50 кОм при номинальном значении напряжения ( |
|
|
Номинальное: |
| |
|
|
||
|
Замкнутая цепь |
Минимальное: 0 Ом |
|
|
Номинальное: 0,05 |
| |
|
Для классов тока - по табл.4 |
||
|
Длительность сигнала (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время восстановления (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время перехода |
Максимальное: 8 мс (1 мс - для специального применения) |
Кроме указанного - по ГОСТ Р МЭК 870-4-93 |

Таблица 11
Активные двоичные выходные сигналы (черт.6б)
|
Характеристика |
Значение сигнала и параметров цепи |
Примечание |
|
Сигнал низкого уровня - |
Минимальное: 0% от номинального значения напряжения ( |
Диапазон сигнала включает колебания напряжения частоты сети |
|
|
Номинальное: 0% от номинального значения напряжения ( |
|
|
|
Максимальное: +10% от номинального значения напряжения ( |
|
|
|
|
|
|
Сигнал высокого уровня - |
Минимальное: +80% от номинального значения напряжения ( |
|
|
Номинальное: +100% от номинального значения напряжения ( |
| |
|
|
Максимальное: +120% от номинального значения напряжения ( |
|
|
|
Для классов тока - по табл.4 |
|
|
Длительность сигнала (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время восстановления (по черт.3) |
Минимальное: 10 мс (3 мс - для специального применения) |
- |
|
Время перехода |
Максимальное: 8 мс (1 мс - для специального применения) |
Кроме указанного - по ГОСТ Р МЭК 870-4-93 |
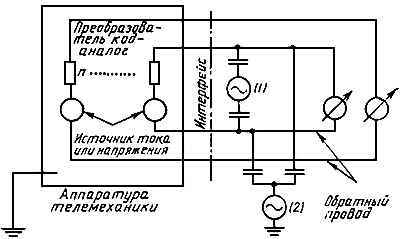
4.4. Аналоговые входные сигналы
Аналоговые входные сигналы, передаваемые от аппаратуры процесса к аппаратуре телемеханики, генерируются источниками напряжения или тока по схеме, приведенной на черт.7а.
Источник тока более предпочтителен.
Схема для аналоговых входных сигналов

(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.7а
Опрос каждого входа не вызывает значительных ошибок в аналоговой информации. Значение сопротивления входной цепи для токовых сигналов не меняется во время опроса.
Данные аналоговых сигналов приведены в табл.12.
Таблица 12
Аналоговые входные и выходные сигналы (черт.7а и 7б)
|
Характеристика |
Значение сигнала |
Примечание |
|
Номинальная область |
По табл.5 |
По черт.4 - номинальная область, включая рабочие перегрузки |
|
Область перегрузки при повреждении |
Каждое значение превышает номинальный предел |
По черт.4 |
|
Максимальное сопротивление нагрузки для выходных токовых сигналов |
10 В ----------------------, кОм номинальное |
- |
|
Максимальное сопротивление нагрузки для входных токовых сигналов |
5 В ----------------------, кОм номинальное |
- |
|
Минимальное сопротивление нагрузки для сигналов напряжения |
200 кОм/В |
- |
Вопрос о возможности использования пассивных аналоговых входов (например переменных сопротивлений) решается по согласованию между изготовителем и пользователем.
4.5. Аналоговые выходные сигналы
Аналоговые выходные сигналы, передаваемые от аппаратуры телемеханики к аппаратуре процесса, генерируются источниками напряжения или тока по схеме, приведенной на черт.7б.
Источник тока более предпочтителен.
Схема для аналоговых выходных сигналов
(1) - напряжение помех нормального вида;
(2) - напряжение помех общего вида
Черт.7б
5. ИНТЕРФЕЙС МЕЖДУ АППАРАТУРОЙ ТЕЛЕМЕХАНИКИ И АППАРАТУРОЙ ОПЕРАТОРА
Данный интерфейс представляет собой линию связи, по которой информация передается между аппаратурой оператора и аппаратурой телемеханики.
Аппаратура оператора может быть разделена на два класса в зависимости от формы сигналов для передачи информации через интерфейс к аппаратуре телемеханики.
Класс А. Информация передается при помощи двоичных или аналоговых входных (выходных) сигналов.
Для данного класса типичными являются лампы, переключатели, регистрирующие приборы и миллиамперметры. Интерфейс аналогичен приведенному в разд.4.
Для установления значений напряжения помех и требований к изоляции могут быть использованы стандарты, приведенные в табл.7, с менее жестким классом.
Класс В. Информация передается при помощи последовательных или параллельных цифровых каналов передачи. Для такого класса типичными являются печатающие устройства, дисплеи и т.п.
В каналах с последовательной передачей бит обычно используют стандартный интерфейс, приведенный в п.6.1.
Параллельный цифровой интерфейс аналогичен интерфейсу, приведенному в п.7.2.
6. ИНТЕРФЕЙС МЕЖДУ АППАРАТУРОЙ ТЕЛЕМЕХАНИКИ И ПОДСИСТЕМАМИ СВЯЗИ
Рассматриваются два различных интерфейса:
а) когда модем (АПД) является частью аппаратуры телемеханики (ATM) по п.6.2;
б) когда модем (АПД) не является частью аппаратуры телемеханики (ATM) по п.6.1.
Из-за сходства техники передачи модем (АПД), используемый в системах телемеханики, аналогичен используемому в других системах передачи данных.
Если для систем телемеханики применяется специальное оконечное устройство передачи данных, его функциональные и электрические характеристики должны соответствовать характеристикам оконечных устройств общего применения, стандартизованным МККТТ. В следующих пунктах приведены ссылки на соответствующие рекомендации МККТТ.
6.1. Интерфейс между аппаратурой телемеханики (ATM) и оконечным устройством передачи данных (АПД)
Такой интерфейс необходим, если оконечное устройство передачи данных не является частью аппаратуры телемеханики.
6.1.1. Цепи обмена
В соответствии с рекомендациями МККТТ* цепи связи между ATM и АПД, необходимые для передачи двоичных данных, для сигналов контроля и временных сигналов называются "Цепи обмена".
_______________
* Международный консультативный комитет по телеграфии и телефонии.
Цепи обмена между аппаратурой телемеханики и оконечным устройством передачи данных состоят из цепей, приведенных в рекомендациях V.24 МККТТ.
В системах телемеханики используют следующие цепи:
а) для передачи телемеханических данных:
цепь 103 "Передаваемые данные";
цепь 102 или 102а "Сигнальное заземление" или "Общий обратный провод";
цепь 106 "Готовность к передаче";
цепь 105 "Запрос передачи" (например для систем с запросом станции);
цепь 113 или 114 "Синхронизация элементов передаваемого сигнала" (только для синхронных систем передачи данных);
б) для приема телемеханических данных:
цепь 104 "Принимаемые данные";
цепь 102 или 102б "Сигнальное заземление" или "Общий обратный провод";
цепь 107 "АПД готова";
цепь 109 "Детектор принимаемого линейного сигнала канала данных";
цепь 110 "Детектор качества сигнала данных" (Не обязателен. Нет необходимости, если определение качества сигнала выполняется аппаратурой телемеханики);
цепь 115 "Синхронизация элементов принимаемого сигнала" (Только для синхронных систем передачи данных).
По специальным требованиям могут быть использованы другие цепи обмена, приведенные в Рекомендациях V.24 МККТТ.
Аппаратура телемеханики может быть приспособлена к этим функциям по согласованию между изготовителем и пользователем.
Другие цепи обмена, кроме установленных в Рекомендации V.24 МККТТ, не должны применяться.
6.1.2. Электрические характеристики
Электрические характеристики интерфейсов между аппаратурой телемеханики и оконечными устройствами передачи данных установлены в:
а) Рекомендациях V.28 МККТТ для несимметричных двухполярных цепей обмена, если оконечная аппаратура передачи данных выполнена по технологии дискретных элементов;
б) Рекомендациях V.10 МККТТ для несимметричных двухполярных цепей обмена, если оконечная аппаратура передачи данных выполнена на интегральных схемах;
в) Рекомендациях V.II МККТТ для симметричных двухполярных цепей обмена, если оконечная аппаратура передачи данных выполнена на интегральных схемах.
В данных рекомендациях установлены напряжения открытой цепи, точка доступа, активное и общее сопротивление источника и нагрузки. Уровни сигналов, характеристики кабеля между аппаратурой телемеханики и оконечным устройством передачи данных, максимальную скорость передачи данных и расстояние между ATM и АПД устанавливают, исходя из нижеследующей информации.
Максимально допускаемые расстояния между ATM и АПД при соответствующих скоростях передачи приведены в табл.13.
Таблица 13
Физическое расстояние между АПД/АТМ и максимальная скорость передачи
|
Рекомендации МККТТ |
Расстояние, м |
Максимальная скорость передачи, кбит/с |
|
V.28 |
15 |
20 |
|
|
1000 |
|
|
V.10 |
100 |
10 |
|
|
10 |
100 |
|
|
1000 |
10 |
|
V.11 |
100 |
100 |
|
|
10 |
1000 |
Следует отметить, что в системах телемеханики обычно используют несимметричные цепи обмена между ATM и АПД (см. Рекомендации V.28 или V.10). Симметричные цепи используют только в случаях ожидаемых интенсивных наводок (помех).
6.1.3. Механические соединения
Количество проводов между ATM и АПД устанавливают по согласованию между изготовителем и пользователем. При использовании модемов МККТТ выбирают соответствующие разъемы.
В табл.14 приведены рекомендации МККТТ по функциям и электрическим характеристикам, стандарты ИСО на механические характеристики, а также соответствующие государственные стандарты.
Таблица 14
Рекомендации и стандарты МККТТ, ИСО и ГОСТ для интерфейсов ATM - АПД
|
МККТТ |
ИСО (МОС) |
ГОСТ | |||
|
Функции |
Электрические характеристики |
Соединения |
Функции |
Электрические характеристики |
Соединения |
|
V.24 |
V.28 |
ИСО 2110 (25-контактный разъем) |
|||
|
V.24 |
V.10 |
ИСО 4902 (37-контактный разъем) |
|||
|
V.24 |
V.11 |
ИСО 4902 (37-контактный разъем) |
|||
6.2. Интерфейс между оконечным устройством передачи данных и аппаратурой канала связи
Данный интерфейс должен быть согласован между пользователем и изготовителем и должен соответствовать рекомендациям МККТТ для двоичной последовательной передачи данных (по рекомендациям МККТТ серий R и V).
Следует принимать во внимание правила соответствующих национальных управлений, если используются арендованные каналы, радиоканалы, ВЧ каналы по ВЛ и т.п.
6.2.1. Характеристики передачи
Скорость передачи, распределение каналов и параметры передачи должны соответствовать рекомендациям МККТТ.
Для низкочастотной телеграфной передачи вышеуказанные характеристики выбирают из рекомендаций МККТТ серий R.
Для улучшения использования имеющихся в распоряжении каналов связи могут быть применены специальные схемы.
Для передач со средней и высокой скоростью характеристики должны соответствовать рекомендациям МККТТ серий V для аналоговой передачи и серий Х для цифровой передачи.
6.2.2. Электрические характеристики
Электрические характеристики (уровни сигналов, входные и выходные сопротивления и т.п.) должны соответствовать:
рекомендациям МККТТ и (или) местным правилам для передачи данных по арендованным каналам;
МЭК 495 для передачи данных по ВЧ каналам по ВЛ;
рекомендациям МККР* для передачи данных по радиоканалам и микроволновым каналам.
_______________
* Международный консультативный комитет по радиосвязи.
7. ИНТЕРФЕЙС МЕЖДУ АППАРАТУРОЙ ТЕЛЕМЕХАНИКИ И АППАРАТУРОЙ ОБРАБОТКИ ДАННЫХ
Данный интерфейс определяет линию связи, по которой передается информация между устройством телемеханики и аппаратурой обработки данных на контролируемых и (или) контролирующих станциях (по черт.1). Аппаратура обработки данных обычно соединяется последовательным или параллельным цифровым интерфейсом.
7.1. Последовательный интерфейс
Последовательный интерфейс аналогичен интерфейсу, описанному в п.6.1. Для него используют стандарты, приведенные в табл.14.
По согласованию между изготовителем и пользователем могут быть использованы другие интерфейсы (например "токовая петля").
Физические, электрические и функциональные показатели определяются следующими основными параметрами:
число проводов (две или четыре жилы) и их характеристики;
одиночная или двойная петля для тока;
номинальный, минимальный и максимальный токи;
значение напряжения источников питания и их расположение;
остаточное напряжение на передатчике и приемнике;
гальваническая развязка;
расстояние между процессорами;
скорость передачи и протокол.
7.2. Параллельный интерфейс
При необходимости высокой скорости передачи, а также если аппаратура телемеханики и аппаратура обработки данных расположены близко друг от друга (на небольшом расстоянии) параллельная связь может быть более эффективной.
В этом случае может быть много вариантов соединений в зависимости от возможностей процесса.
Могут быть использованы такие стандарты как ГОСТ 26.003, но обычно интерфейс согласовывается между изготовителем и пользователем.
Должны быть установлены физические, электрические и функциональные требования, например:
конструкция интерфейса;
уровень напряжения;
гальваническая развязка и расположение источника питания;
скорость передачи и протокол;
объем существующего стандартного математического обеспечения канала связи.
Текст документа сверен по:
официальное издание
М.: Издательство стандартов, 1994