
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
января
13
понедельник,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
|
МИНИСТЕРСТВО ТРАНСПОРТА |
Руководителям территориальных |
25 ноября 2005 г. в районе н.п. Находка (Тазовский район) произошла авария вертолета Ми-8Т RA-25605 авиакомпании «Ямал», подконтрольной Приобскому управлению государственного авиационного надзора.
Экипаж вертолета в составе командира ВС В.И. Мякушко (общий налет на вертолете Ми-8 - 10033 часа, в качестве командира - 2802 часа) второго пилота Д.С. Икалюка (общий налет - 1130 часов, на вертолете Ми-8 - 1057 часов) и бортмеханика Н.Е. Скоробогатова (общий налет на вертолете Ми-8 - 10333 часа) выполнял транспортно-связной полет по обслуживанию Тазовского рыбозавода. Кроме трех членов экипажа на борту вертолета находилось 10 пассажиров.
При посадке на подобранную с воздуха посадочную площадку в районе н.п. Находка посадочная масса вертолета составляла 10363 кг, центровка +136 мм, что не выходило за ограничения, установленные РЛЭ вертолета Ми-8Т.
При выполнении полетов 25.11.05 г., посадка на подобранную в районе н.п. Находка площадку выполнялась второй раз. Заход и посадка выполнялись на заснеженную, неравномерно промерзшую, болотистую пойму Тазовской губы, в стороне от места, где выполнялась первая посадка.
Экипаж вертолета с висения на высоте 20...28 метров произвел осмотр предполагаемого места посадки и продолжил снижение для высадки бортмеханика с целью определения прочности поверхности площадки.
При зависании над подобранной площадкой, не дождавшись высадки бортмеханика, командир вертолета в течение 12 секунд плавно уменьшил общий шаг несущего винта до 1,9...2,2°, что привело к приземлению вертолета с проваливанием колеса левой основной стойки шасси под лед.
Проваливание левой стойки привело к развитию левого крена, реагируя на который командир вертолета энергично (менее чем за 1 секунду) увеличил общий шаг несущего винта до 9,4° с одновременным перемещением правой педали вперед почти до упора. Ручка управления циклическим шагом была отклонена вперед и вправо. Несмотря на предпринятые действия, левый крен увеличился до -4°. Тангаж на кабрирование увеличился до 3° на кабрирование.
Энергичные и несоразмерные управляющие действия командира вертолета привели к уменьшению оборотов несущего винта, а разворот вертолета вправо - к большему зарыванию колеса левой стойки шасси под лед.
В нарушение требований п.4.14.18 РЛЭ вертолета Ми-8, при увеличении крена более чем на 3° командир вертолета продолжил предпринимать попытки восстановить пространственное положение вертолета. Согласно РЛЭ вертолета Ми-8, в возникшей ситуации командир ВС должен был плавно увеличить общий шаг несущего винта и, парируя тенденцию вертолета к смещению в сторону крена и развороту из-за возможной не координированной «дачи» правой педали, выполнить взлет.
Продолжая парировать левый крен, КВС отклонил ручку циклического шага до упора вправо и «от себя».
Ошибки, допущенные экипажем, привели к дальнейшему увеличению крена до 12°. Кренение вертолета влево было вызвано большим, чем требовалось для балансировки вертолета с нулевым креном, отклонением ручки управления, а также чрезмерной дачей правой педали. Как показали специальные исследования (см. приложение), дальнейшее увеличение крена вертолета более 12° было связано с превышением критического угла крена (11,5°) равновесного состояния вертолета, при отклоненном до упора вправо автомате перекоса.
Увеличение крена до 40°, которое экипаж вертолета уже не мог парировать, привело к касанию лопастей несущего винта о заснеженную поверхность, разбалансировке несущего винта и ударам лопастей по хвостовой балке. После разрушения хвостовой балки вертолет развернулся влево, при этом была подломлена передняя) стойка шасси.
В результате авиационного происшествия экипаж вертолета и пассажиры не пострадали. Вертолет получил значительные повреждения.
Причиной авиационного происшествия явилось сочетание следующих факторов:
- недостаточное взаимодействие командира и второго пилота вертолета, что привело к упущению контроля за параметрами висения перед посадкой;
- ошибочные действия командира вертолета, выразившиеся в преждевременном (до осмотра бортмехаником состояния и прочности поверхности в месте посадки) уменьшении шага несущего винта, что привело к проваливанию левой стойки вертолета под лед;
- невыполнение экипажем требований пункта 4.14.18 РЛЭ вертолета Ми-8, что в сочетании с энергичными и несоразмерными действиями (отклонение ручки циклического шага полностью вправо - «от себя» и нескоординированная дача правой педали на полный ход), привело к превышению допустимого угла крена и, как следствие, потере поперечной управляемости.
Предлагаю:
1. Руководителям территориальных управлений государственного авиационного надзора довести настоящее заключение до всех подконтрольных организаций, эксплуатирующих вертолеты и самолеты 4-го класса.
2. Руководителям организаций гражданской авиации:
2.1. При подготовке к полетам в осенне-зимний период изучить настоящее заключение с летным составом, выполняющим полеты на вертолетах и самолетах 4-го класса. Обратить внимание на порядок подбора посадочных площадок в тундре, на заболоченной местности, а также на льду водоемов.
2.2. С экипажами вертолетов изучить настоящее заключение совместно с материалами математического моделирования, выполненного ОАО «МВЗ им. М.Л. Миля» (приложение к настоящему заключению).
2.3. Обратить внимание летного состава, выполняющего полеты на вертолетах Ми-8, на требования п. 4.14.18 РЛЭ вертолета Ми-8 (п.4а.6.17 РЛЭ вертолета Ми-8АМТ и Ми-8МТВ-1) в части соблюдения требований по действиям при кренении или изменении угла тангажа вертолета при выполнении посадки на площадки, подобранные с воздуха.
|
Начальник Управления |
|
|
«Утверждаю» |
ОТЧЕТ
по результатам математического моделирования махового движения
лопастей несущего винта и анализу причин авиационного происшествия
с вертолетом Ми-8Т RA 25605 авиакомпании "АТК Ямал".
Заместитель генерального конструктора
В.И. Янкевич
Начальник отдела аэродинамики
В.А. Ивчин
Начальник бригады
А.П. Вайнтруб
Ведущий конструктор
Т.В. Ивакова
При посадке на подобранную с воздуха площадку произошло авиационное происшествие с вертолетом Ми-8Т RA 25605, в котором имело место разрушение лопастей несущего винта, хвостовой балки и других агрегатов вертолета. Предпосылкой к началу развития аварийной ситуации являлось «проваливание» левого колеса шасси под лед при выполнении посадки (как будет показано ниже, приблизительно на половину диаметра колеса ниже поверхности льда). При анализе обстоятельств, приведших к разрушению хвостовой балки, возникли вопросы:
- могло ли соударение лопастей несущего винта с хвостовой балкой быть вызвано непосредственно управляющими действиями летчика?
- предшествовало ли удару по хвостовой балки касание лопастями несущего винта поверхности площадки в процессе увеличения угла крена вертолета?
С целью выяснения причин разрушения хвостовой балки, в соответствии с обращением Комиссии по расследованию АП с вертолетом Ми-8Т RA 25605 к Генеральному конструктору (см. Приложение), выполнено математическое моделирование махового движения лопастей несущего винта. При этом определялись имевшие место минимальные расстояния от концов лопастей до хвостовой балки и поверхности площадки.
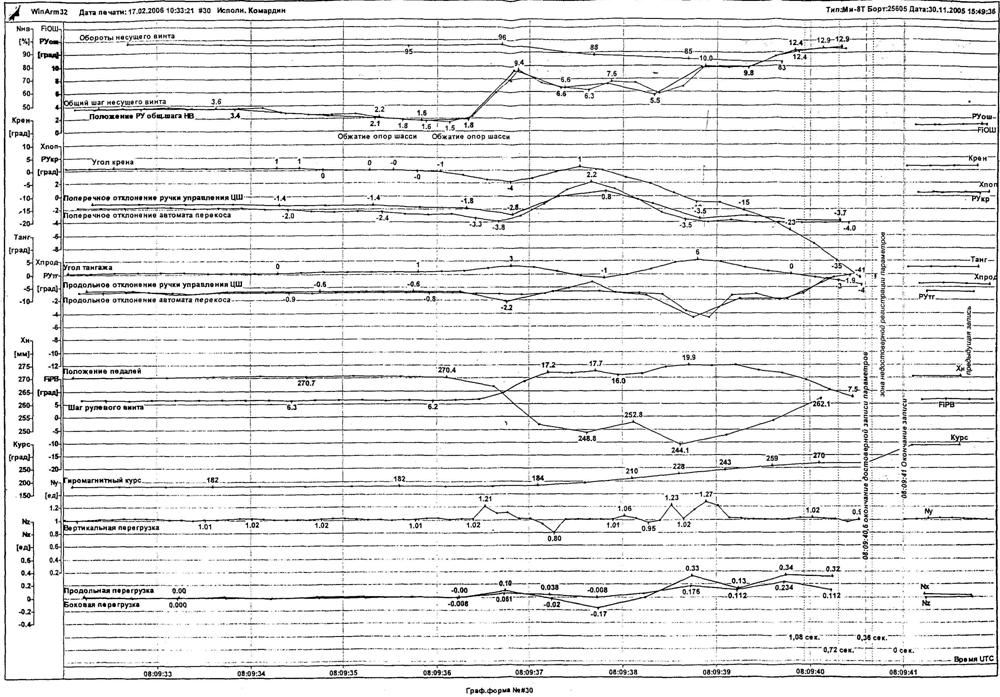
В качестве исходного материала для исследований принимались записи параметров бортового регистратора БУР-1-2Ж, приведенные на рис.1 (а...и) расшифровки МАК от 13.01.06г.
Примечание. При дальнейшей проработке (см. приведенную в Приложении расшифровку МАК от 17.02.06г.) запись параметров после времени 08:09:40,6 UTC была определена как недостоверная. На графиках рис.1 (а...и) граница достоверной записи показана вертикальной пунктирной линией (она соответствует началу резкого изменения вертикальной перегрузки на рис.1 и).
На этом основании математическое моделирование движения лопастей несущего винта проводилось для участка записи БУР в интервале времени от 08:09:32 по 08:09:40,6 UTC.
1. Анализ достоверности информации, зарегистрированной БУР.
Результаты математического моделирования зависят от использованного исходного материала. Поэтому расчетам предшествовало рассмотрение зарегистрированных БУР параметров, с точки зрения их соответствия материалам летных испытаний и расчетам балансировочных режимов полета и посадки вертолета. Анализ отклонений органов управления показал следующее.
1.1. Углы наклона автомата перекоса в продольном отношении (показаны на рис. 1е синим цветом) значительно отличаются (на 3,3°) от соответствующих отклонений ручки управления, представленных в градусах наклона автомата перекоса (бордовый цвет). Из материалов летных испытаний известно, что на режиме висения вертолета с передней центровкой автомат перекоса не может быть столь значительно (-4°) отклонен вперед. Расчеты показали, что более достоверными являются зарегистрированные БУРом отклонения ручки управления. На этом основании запись автомата перекоса была совмещена на участке установившегося режима полета с соответствующей записью ручки управления (показана зеленным цветом). Имеющиеся отличия между записями ручки управления и автомата перекоса при времени более 08:09:36 UTC учитывалось при расчетном анализе махового движения лопастей путем оценки влияния возможных отклонений автомата перекоса от зарегистрированных значений.
1.2. На записи параметров БУР (рис. 1,б) наблюдаются отклонения автомата перекоса вправо до 4°.
Примечание. На вертолете Ми-8Т максимальное отклонение автомата перекоса от перемещения ручки управления вправо составляет 3,4°+/-0,2°. При включенном автопилоте возможно дополнительное отклонение автомата перекоса вправо на ~0,7°.
Имеющиеся отличия значений параметров поперечного управления (в интервале времени (08:09:37...08:09:38 UTC) - наклона автомата перекоса и ручки управления, можно объяснить влиянием работы автопилота, а также не одинаковой дискретностью «опроса» и погрешностями тарировки датчиков. В этой связи, при расчетном анализе маховых движений лопасти на боковых азимутах винта и при определении сближения концов лопастей несущего винта с «землей» рассматривались отклонения автомата перекоса вправо как 4,0°, так и 3,4°.
1.3. Изменение во времени оборотов несущего винта представлено на рис. 1г. Анализ показал, что градиент уменьшения оборотов несущего винта в интервале времени 08:09:39,68...40,68 UTC не отражает характер увеличения общего шага, начиная с 39с, и наиболее вероятно обусловлен недостаточной частотой опроса датчика. Учитывая частоту опроса оборотов несущего винта (1гц) и отсутствие достоверной информации после 08:09:39,68 восстановление оборотов в течение последней секунды было выполнено на основании того, что значительное торможение несущего винта могло произойти после 08:09:40,6 (пунктирная линия на графике 1 г). Принимая во внимание важность достоверного учета оборотов несущего винта при определении махового движения лопастей, принимались во внимание как скорректированные, так и исходные (по записи БУРа) значения оборотов несущего винта.
1.4. Величины перемещения штока рулевого винта были пересчитаны по кинематической зависимости в градусы углов установки лопастей. На рис.1,ж они совмещены с записью перемещений педалей, выраженных в градусах углов установки лопастей РВ. Видно, что до момента времени, равного 08:09:40,6 UTC, углы установки лопастей рулевого винта по штоку и педалям практически совпадают (показанные на графике положение педалей, соответствующее времени 08:09:40,61 UTC, и шага рулевого винта при времени 08:09:40,7 UTC относятся к участку записи БУР недостоверной информации).
Таким образом, параметры вертолета, зарегистрированные БУРом в процессе авиационного происшествия с вертолетом Ми-8Т RA 25605 в интервале времени до 08:09:40,6 UTC в основном достоверны. Выявленные погрешности записей учтены в расчетном анализе соответствующей вариацией параметра.
Анализ причин значительного увеличения угла крена вертолета, зарегистрированного БУРом.
БУРом зарегистрированы углы крена вертолета более 40°. Определение причины столь значительного увеличения угла крена имеет важное значение для анализа авиационного происшествия.
Из записи изменения во времени угла крена (рис. 1 ,а) и отклонения автомата перекоса (ручки управления) в поперечном отношении (рис. 1,6) следует, что ко времени 08:09:37,3 UTC летчик устранил левый крен вертолета, возникший в результате проваливания ниже поверхности льда левого колеса шасси на величину, равную ![]() , - около половины диаметра колеса. (Вероятно, что при восстановлении вертикального положения вертолета левое колесо частично осталось подо льдом из-за выхода штока амортизатора шасси).
, - около половины диаметра колеса. (Вероятно, что при восстановлении вертикального положения вертолета левое колесо частично осталось подо льдом из-за выхода штока амортизатора шасси).
Однако далее вновь произошло увеличение угла крена вертолета. В данном случае, как следует из записей БУР, оно было вызвано отклонением автомата перекоса (ручки управления) влево большим, чем требуемое для балансировки вертолета с нулевым углом крена, а также чрезмерной дачей правой педали. Чем такое отклонение ручки было обусловлено, определить по записям БУР затруднительно.
Последующее парирующее отклонение ручки управления вправо до упора было недостаточно энергичным. В результате ко времени 08:09:39 UTC угол крена влево увеличился до 12°. Этому значению на записи БУР соответствует приостановка увеличения угла крена.
Примечание. Можно предположить (основываясь на кратковременном увеличении перегрузки на записи БУР, и зафиксированном следе на снегу от правого колеса), что приостановка увеличения крена была вызвана вертикальным «проседанием» вертолета: правое колесо коснулось земли, а левая стойка шасси (с нижним обтекателем еще в большей степени провалилась приблизительно на ![]() ниже поверхности льда.
ниже поверхности льда.
Произошедшее дальнейшее увеличение угла крена вертолета связано с тем, что, как показал расчетный анализ, был превышен критический угол крена равновесного состояния вертолета, при отклоненном до упора вправо автомате перекоса.
Расчетная зависимость критического угла крена, при котором возможна балансировка вертолета при левом угле крена на «земле» представлена на рис.2. Она получена для условий соответствующих времени 08:09:38,9 UTC:
- автомат перекоса отклонен вправо и вперед до -3,9° и -4,0°, соответственно.
- обороты несущего винта 85%;
- шаг рулевого винта равен 20° (при этом, как показал расчет, тяга рулевого составила -1250 кг);
- центровка вертолета - передняя;
- ветер 7м/с, с направлением действия спереди -слева (принято на основании отчета группы метео);
- вертолет упирается в лед нижней поверхностью левого обтекателя горизонтального подкоса шасси.
Маркером на рис. 2 показано расчетное значение критического угла крена, соответствующее тяге несущего винта, равной -80% от веса вертолета.
Примечание. Величина тяги несущего винта определена на основании приблизительного равенства значений общего шага на режиме висения перед посадкой (при этом аэродинамический коэффициент тяги винта соответствует условию Tнв=G) и при времени 08:09:38,9 по UTC (при этом аэродинамический коэффициент тяги винта такой же, однако Тнв меньше G из-за просадки оборотов несущего винта).
При углах крена, превышающих значений, показанных на графике, остановить угловое движение вертолета влево уже не представляется возможным (так как возможности системы управления исчерпаны).
Аналогичная ситуация, также связанная с превышением критического угла крена, имела место при аварийном взлете с местности, имеющей уклон, вертолета Ми-8Т RA-24021 ДП ГУП «Норильского авиапредприятия» (АПБЧЖ произошло 02.09.2000г.). Из рис.3 - фрагмента записи параметров БУР, взятом из материалов Отчета (стр.22) видно, что максимальный угол крена достиг 46°, т.е. увеличился практически до такой же величины, как в анализируемом авиационном происшествии с вертолетом Ми-8Т RA-25605.
Пояснение. Физическая сущность усложнения взлета вертолета с площадки, имеющей боковой уклон, или в случае, если на площадке было допущено увеличение угла крена, состоит в следующем.
При увеличении тяги несущего винта сила, прижимающая вертолет к земле, уменьшается. Состояние вертолета становится неустойчивым. Опрокидыванию вертолета влево способствует момент от силы тяги рулевого винта (всегда направленный влево). При определенных сочетаниях угла крена, соотношения силы тяги несущего винта и веса, положения ручки управления в поперечном и продольном направлениях, а также других факторов, опрокидывающий момент может превысить восстанавливающий, и вертолет оторвет от поверхности площадки правое колесо. При этом угол крена еще больше увеличивается, и опрокидывающий момент резко возрастает по времени.
Опрокидывание вертолета может произойти и на ровной площадке, если летчик при «полувзвешенном» состоянии вертолета допустит превышение критического угла крена. Это относится и к случаям, когда левое колесо упрется в боковое препятствие, образуемое снежным валиком при соскальзывании под уклон, из-за попадания колеса в ямку при рулении или при проваливании под лед.
При работе на площадке реакция вертолета на отклонения органов управления ощущается летчиком в значительно меньшей степени, чем на режиме висения. Поэтому при взлете вертолета из положения на площадке поперек уклона, или в случае возникновения угла крена, вследствие проваливания одного из основных колес под лед, от летчика требуется повышенное внимание, так как недостаточные или чрезмерно большие отклонения органов управления могут привести к опрокидыванию вертолета.
Для обеспечения безопасного взлета и посадки в РЛЭ вертолета Ми-8Т установлен допустимый уклон площадки равный 3° в поперечном отношении.
Таким образом, вышеизложенный анализ показал, что запись угла крена, зарегистрированная БУРом, является достоверной. Развитие угла крена влево было обусловлено превышением его критического значения по условию возможности парирования увеличения угла крена отклонением автомата перекоса вправо до упора.
Маховое движение лопастей несущего винта на азимуте хвостовой балки, ![]() .
.
Расчет махового движения лопастей несущего винта производился по разработанным на МВЗ им. М.Л.Миля двум методикам, апробированным по материалам летных испытаний и показавшими достоверность получаемых результатов.
Особенностью первой методики является определение интегральных аэродинамических характеристик несущего винта и махового движения лопастей на соответствующих азимутах. По второй методике расчет аэродинамических сил и маховое движение производится для каждой из лопастей индивидуально, что позволяет учесть динамику взмаха лопасти.
Математическое моделирование махового движения лопастей несущего винта, как указывалось выше, производилось по задаваемым по времени отклонениям органов управления и угловым скоростям тангажа и крена (определяемым путем дифференцирования соответствующих углов).
Результаты расчета углов взмаха лопастей несущего винта на азимуте расположения хвостовой балки, ![]() , выполненные по первой методике, приведены на рис.4. Из графика видно, что в интервале времени 08:09:32 - 40,6 по UTC величины углов взмаха лопастей не менее нуля, т.е. лопасти несущего винта не опускаются ниже конструктивной плоскости вращения (расположенной перпендикулярно валу несущего винта). При этом расстояние от концов лопастей несущего винта до хвостовой балки составляет более 2 м (рис.5).
, выполненные по первой методике, приведены на рис.4. Из графика видно, что в интервале времени 08:09:32 - 40,6 по UTC величины углов взмаха лопастей не менее нуля, т.е. лопасти несущего винта не опускаются ниже конструктивной плоскости вращения (расположенной перпендикулярно валу несущего винта). При этом расстояние от концов лопастей несущего винта до хвостовой балки составляет более 2 м (рис.5).
Исследовалось влияние отклонений параметров от значений, зарегистрированных БУРом. В расчетах, результаты которых представлены на рис.4, максимальное отклонение автомата перекоса назад составляло 2,3° (время 08:09:40,6 UTC). Если предположить, что в этот момент времени автомат перекоса был отклонен до упора, т.е. до 5, то и в этом случае, как показал расчетный анализ, зазоры до хвостовой балки были велики.
Расчеты при значениях общего шага несущего винта меньших на 2°, чем полученные по записи БУР, показали, что при этом углы взмаха лопастей уменьшаются на ~1°.
На рис.6 показаны результаты расчета при оборотах несущего винта, в соответствии с дискретной регистрацией БУР в интервале времени до 08:09:40,68 по UTC. Расчет показал, что имевшее место уменьшение оборотов несущего винта практически не повлияло на маховое движение лопастей, так как при этом уменьшались как сила тяги винта, так и центробежная сила лопастей.
Относительно большое расстояние концов лопастей до хвостовой балки обусловлено большой величиной тяги несущего винта, определяющей угол конусности несущего винта. Наличие угловой скорости тангажа, направленной на пикирование, составлявшей ~5град/с, привело к незначительному отклонению конуса лопастей в сторону сближения с хвостовой балкой (на ~0,5 град). При этом наличие угловой скорости крена влево ~27град/с вызвало наклон конуса лопастей на 1,2° в обратную сторону.
На рис.7... 11 приведены результаты расчета махового движения каждой из лопастей несущего винта по второй методике. На каждом из графиков иллюстрируется изменение во времени угла взмаха одной из пяти лопастей. Маркерами показаны значения углов взмаха лопасти, соответствующие моментам времени, при которых ![]() . Из графиков видно, что углы взмаха лопасти имеют значения большие нуля, т.е. концы лопастей находятся выше плоскости вращения.
. Из графиков видно, что углы взмаха лопасти имеют значения большие нуля, т.е. концы лопастей находятся выше плоскости вращения.
Таким образом, математическое моделирование махового движения лопастей показало, что в условиях посадки и попытки взлета вертолета, после проваливания левого колеса под лед, отклонения органов управления как зафиксированные БУРом, так и предельные (рассмотренные как предполагаемые), не могли привести к удару лопастями несущего винта по хвостовой балке. К моменту времени 08:09:40,6 UTC зазоры между лопастями и хвостовой балкой были не менее 2м.
Маховое движение лопастей на боковых азимутах несущего винта слева - ![]() (азимуте, перпендикулярном к линии, проходящей через левое колесо шасси, параллельно продольной оси симметрии вертолета) и
(азимуте, перпендикулярном к линии, проходящей через левое колесо шасси, параллельно продольной оси симметрии вертолета) и ![]() (азимуте перпендикулярном к линии, проходящей через левое и переднее колеса шасси).
(азимуте перпендикулярном к линии, проходящей через левое и переднее колеса шасси).
Относительно линии, проходящей через левое и переднее колеса шасси, наиболее вероятно происходило кренение вертолета. Это следует из того, что с момента времени 08:09:39 UTC (рис.1д) увеличение угла крена сопровождалось изменением угла тангажа на пикирование. Тем не менее, для полноты анализа при математическом моделировании махового движения лопастей НВ рассмотрены варианты углового движения вертолета относительно линий, перпендикулярных как азимуту винта 120°, так и 90° .
Результаты расчета углов взмаха лопастей на азимутах винта 90° и 120° приведены на рис.12. Из графика видно, что угол взмаха лопасти на азимутах винта слева достигал ~20° вверх от плоскости вращения. Значительные углы взмаха лопастей были обусловлены отклонением автомата перекоса вправо, а также большим значением шага НВ (увеличивающим угол конусности винта) и значительным демпфирующим влиянием угловой скорости крена на маховое движение лопастей (угловая скорость крена составляла около 30 /с.
Конус лопастей несущего винта был отклонен в сторону, противоположную кренению вертолета. Поэтому требуются большие углы крена вертолета для соприкосновения концов лопастей винта с поверхностью площадки.
На рис.13 и 14 показано изменение во времени расстояния между концами лопастей и «землей» при различном проваливании левого колеса относительно поверхности льда. Из графика на рис.13 следует, что при проваливании на 0,43 м - половина диаметра колеса (при этом вертолет упирается в лед нижним обтекателем левого шасси) касание лопастью поверхности площадки происходит в момент времени 08:09:40,41 - 40,49 UTC, в зависимости от азимута винта. При этом соответственно, угол крена достигает значений 37,6°...40,3°.
Если имело место проваливание вертолета на 0,86м ниже поверхности льда (рис.14), то касание лопастью поверхности площадки могло произойти в момент времени 08:09:40,33 - 40,43 UTC, в зависимости от азимута винта. При этом угол крена: 36,1°...37,6°.
Таким образом, математическое моделирование показало, что в результате значительного увеличения угла крена, касание лопастями несущего винта снежной поверхности площадки могло иметь место в интервале времени 08:09:40,3-40,6 UTC (при угле крена 36,1...40,3°). Исходя из того, что в указанном интервале времени зазоры между лопастями несущего винта и хвостовой балкой были велики, можно сделать заключение:
соударение лопастей с хвостовой балкой произошло после касания концов лопастей снежной поверхности площадки в результате последующей разбалансировки несущего винта.
Расчеты показали, что силы и моменты, действующие на элементы конструкции вертолета, в том числе, и на главный редуктор, не превышали эксплуатационных значений, обусловленных отклонениями органов управления. По характеру изменения параметров движения на отклонения органов управления следует, что в интервале времени до 08:09:40,3-40,6 UTC вертолет был исправен.
ВЫВОДЫ
1. На основании математического моделирования махового движения лопастей несущего винта, выполненного по параметрам, зарегистрированным БУР в авиационном происшествии с вертолетом Mи-8TRA 25605, установлено:
- управляющие действия летчика не могли, непосредственным образом, вызвать соударение лопастей несущего винта с хвостовой балкой.
- в процессе увеличения угла крена вертолета произошло касание концами лопастей несущего винта снежной поверхности площадки, которое в дальнейшем, в результате разбалансировки несущего винта, обусловило соударение лопастей с хвостовой балкой.
- по характеру изменения параметров движения на отклонения органов управления, вертолет был исправен до момента касания лопастями несущего винта снежной поверхности площадки, действовавшие на элементы конструкции вертолета силы и моменты не превышали эксплуатационных значений.
2. По результатам анализа материалов авиационного происшествия представляется, что развитие аварийной ситуации происходило в следующей последовательности:
- возникновение левого крена вертолета, из-за проваливания левого колеса шасси под лед;
- попытка восстановления вертикального положения вертолета, и допущенное при этом повторное увеличение угла крена вертолета;
- превышение допустимой величины угла крена, по условию возможности парирования предельным отклонением ручки управления;
- увеличение угла крена влево до значений более 40°, вызвавшее касание концами лопастей несущего винта снежной поверхности;
- соударение лопастей несущего винта с хвостовой балкой;
- разрушение подкосов подредукторной рамы и других элементов конструкции вертолета.
Рис. 1, а, б, в, г. Полетные параметры вертолета Ми-8Т RA-25605
при аварийной посадке, (расшифровка БУР от 13.01.06 г).
Рис. 1, д, е, ж, з. Полетные параметры вертолета Ми-8Т RA-25605
при аварийной посадке, (расшифровка БУР от 13.01.06 г).
Рис. 1, и. Полетные параметры вертолета
Ми-8Т RA-25605 при аварийной посадке.
Рис. 2. Зависимость критического значения угла крена от относительной тяги
несущего винта, при отклонении автомата перекоса вправо до -4 град.
Рис. 3. Параметры вертолета Ми-8
RA-24021 при аварийном взлете
Рис. 4. Маховое движение лопасти НВ на азимуте 0.
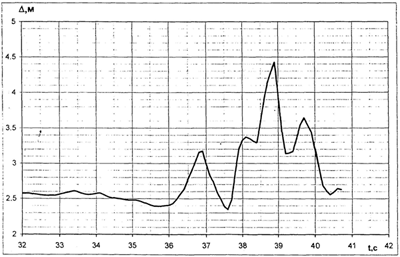
Рис. 5. Расстояние между концами
лопастей НВ и хвостовой балкой.
Рис. 6. Результаты расчета махового движения лопастей
на азимуте ![]() , при оборотах НВ в соответствии с регистрацией БУР.
, при оборотах НВ в соответствии с регистрацией БУР.
Рис.7. Зависимость угла взмаха и
азимута лопасти № 1 по времени.
Рис.8. Зависимость угла взмаха и
азимута лопасти №2 по времени.
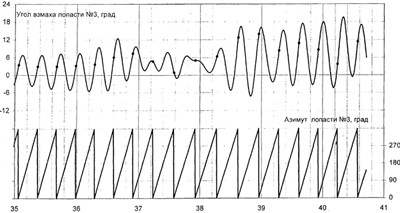
Рис.9. Зависимость угла взмаха
и азимута лопасти №3 по времени.
Рис.10. Зависимость угла взмаха и
азимута лопасти №4 по времени.
Рис.11. Зависимость угла взмаха и
азимута лопасти №5 по времени.
Рис. 12. Маховое движение лопасти
НВ на азимуте 90 и120.
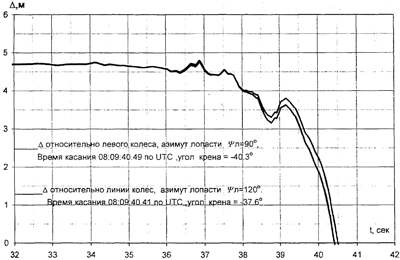
Рис. 13. Расстояние между концами лопастей НВ и "землей" при глубине
проваливания колеса относительно поверхности площадки 0.43 м

Рис. 14. Расстояние между концами лопастей НВ и "землей" при глубине
проваливания колеса относительно поверхности площадки 0.86 м
Приложение
Личный кабинет:
доступно после авторизации «Мужики, я уже не хочу за вас платить!»: Клава Кока рассказала...
«Мужики, я уже не хочу за вас платить!»: Клава Кока рассказала...  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2025 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке