
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
ноября
24
воскресенье,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
ГОСТ 27696-88
(СТ СЭВ 5985-87)
Группа П72
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
Роботы промышленные
ИНТЕРФЕЙСЫ
Технические требования
Industrial robots. Interfaces.
Technical requirements
ОКП 40 6200
Срок действия с 01.01.89
до 01.01.94*
_______________________________
* Ограничение срока действия снято по протоколу N 3-93
Межгосударственного Совета по стандартизации,
метрологии и сертификации (ИУС N 5/6, 1993 год). -
Примечание изготовителя базы данных.
ИНФОРМАЦИОННЫЕ ДАННЫЕ
1. ВНЕСЕН Министерством приборостроения, средств автоматизации и систем управления
2. Постановлением Государственного комитета СССР по стандартам от 25.04.88 N 1135 стандарт Совета Экономической Взаимопомощи СТ СЭВ "Роботы промышленные. Интерфейсы. Технические требования" введен в действие непосредственно в качестве государственного стандарта СССР с 01.01.89.
3. Срок проверки 5 лет.
4. ВВЕДЕН ВПЕРВЫЕ.
5. ССЫЛОЧНЫЕ НОРМАТИВНО-ТЕХНИЧЕСКИЕ ДОКУМЕНТЫ
|
Обозначение НТД, на который дана ссылка |
Номер пункта |
|
ГОСТ 26642-85 |
1.1 |
Настоящий стандарт распространяется на интерфейсы вновь проектируемых систем программного управления (СПУ) промышленными роботами и обслуживаемым технологическим оборудованием по связи между:
1) СПУ и исполнительными устройствами робота;
2) СПУ и обслуживаемым роботом технологическим оборудованием;
3) СПУ и датчиками внешней информации;
4) СПУ системами управления верхнего ранга и другими устройствами цифровой техники.
Настоящий стандарт не распространяется на интерфейсы СПУ при их эксплуатации во взрывоопасной и пожароопасной среде.
1. ОБЩИЕ ТРЕБОВАНИЯ
1.1. Требования к организации связей СПУ с внешними устройствами - по ГОСТ 26642-85.
1.2. Длина соединительных кабелей в интерфейсе "СПУ - исполнительное устройство робота" устанавливается до 15 м и может быть увеличена в технически обоснованных случаях.
1.3. Корпус устройства управления должен быть соединен с общим полюсом вторичных источников питания постоянного тока электронных систем.
2. СИГНАЛЫ СВЯЗИ СПУ С ВНЕШНИМИ УСТРОЙСТВАМИ
2.1. Параметры двухпозиционных сигналов входа должны быть:
1) напряжение постоянного тока 24 В с допускаемыми отклонениями от плюс 10 до минус 15%;
2) ток входа не более 0,02 А.
Входы должны быть гальванически отделены от других цепей СПУ. Электрическая изоляция должна выдерживать напряжение не менее 500 В постоянного тока в течение 1 мин.
Схема соединений двухпозиционных входов показана на черт.1.
Схема связи двухпозиционных входов и выходов СПУ с технологическим оборудованием
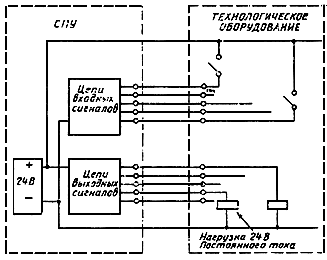
Черт.1
2.2. Параметры двухпозиционных сигналов выхода должны быть:
1) напряжение постоянного тока 24 В с допускаемыми отклонениями от плюс 10 до минус 15%;
2) токи выхода с нагрузкой не более 0,2 А.
Выходы должны быть гальванически отделены от других цепей СПУ. Электрическая изоляция должна выдерживать напряжение не менее 500 В постоянного тока в течение 1 мин.
Схема соединений двухпозиционных выходов показана на черт.1.
Для усиления выходного двухпозиционного сигнала могут быть использованы силовые ключи со следующими параметрами:
1) напряжение постоянного тока 24 В с допускаемыми отклонениями от плюс 10 до минус 15%, ток нагрузки не более 2,0 А
или
2) напряжение переменного тока 110 В с допускаемыми отклонениями от плюс 10 до минус 15% частотой 50 Гц, ток нагрузки не более 0,5 А.
2.3. Параметры входных аналоговых сигналов должны быть:
1) напряжение от 0 до плюс 10 В или от минус 10 до плюс 10 В постоянного тока;
2) входное сопротивление не менее 2 кОм.
Входы должны быть отделены гальванически от других цепей СПУ. Электрическая изоляция должна выдерживать напряжение не менее 500 В постоянного тока в течение 1 мин.
2.4. Параметры аналоговых выходных сигналов напряжения должны быть:
1) напряжение от минус 10 до плюс 10 В постоянного тока;
2) сопротивление нагрузки не менее 2 кОм.
2.5. Параметры аналоговых токовых выходных сигналов должны соответствовать указанным в табл.1.
Таблица 1
|
Ток, А |
Сопротивление нагрузки, Ом, не более |
|
От 0 до 0,004 |
1000 |
|
" 0 " 0,008 |
200 |
|
" 0 " 0,02 |
80 |
|
" 0 " 0,1 |
22 |
2.6. Цифровой последовательный интерфейс
2.6.1. Сигналы напряжения входа и выхода, а также дополнительные каналы входов и выходов данных - с токовыми сигналами от 0 до 20 мА.
2.6.2. Предельные значения сигналов напряжения и тока для бинарных значений сигнала (состояний) 0 и 1 представлены в табл.2.
Таблица 2
|
Бинарное значение сигнала |
0 |
1 |
|
Сигнал напряжения, В |
От +3 до +15 |
От -15 до -3 |
|
Токовый сигнал, мА |
От 0 до 3 |
От 15 до 25 |
2.6.3. Подключение сигналов входов и выходов при помощи разъемов с 25 контактами. Расположение сигналов представлено в табл.3.
Таблица 3
|
N контакта разъема |
Обозначение сигнала |
Код сигнала |
Название сигнала (цепей) |
|
1 |
- |
101 |
Экранирование |
|
2 |
T |
103 |
Передача данных |
|
3 |
R |
104 |
Прием данных |
|
4 |
KTS |
105 |
Запрос на передачу |
|
5 |
CTS |
106 |
Передачу можно осуществить |
|
6 |
DSR |
107 |
Противостанция подготовлена |
|
7 |
GND |
102 |
Сигнальная земля |
|
20 |
DTR |
108/2 |
Станция подготовлена |
 D
D
2. 6.4. Токовые входы и выходы должны быть гальванически отделены от других цепей СПУ. Электрическая изоляция должна выдерживать напряжение не менее 500 В постоянного тока в течение 1 мин.
2.6.5. Скорость передачи информации следует выбирать из ряда:
75, 110, 150, 300, 600, 1200, 2400, 4800, 9600 бит/с.
2.7. Интерфейс для радиального подключения устройств с последовательной передачей информации (ИРПС)
2.7.1. ИРПС является унифицированной системой связей сигналов между устройством ввода-вывода (УВВ) и контроллером (К) СМ ЭВМ. Он обеспечивает единые способы обмена информацией для различных УВВ при работе с К и при непосредственном соединении двух УВВ и двух К (черт. 2). УВВ подключается к К или другому УВВ радиально посредством кабеля.
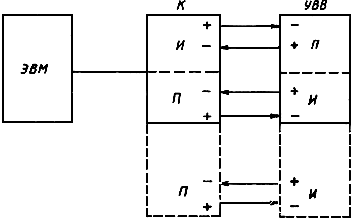
Черт.2
2.7.2. Устройство или контроллер, которое выполняет прием информации, называется приемником (П).
Устройство или контроллер, которое выполняет передачу информации, называется источником (И).
2.7.3. Цепи взаимосвязи ИРПС приведены в табл.4. Знаками "+" и "-" обозначено направление тока в петле.
Таблица 4
|
Цепь |
Значение |
Название |
Направление |
|
Передаваемые данные |
Передаваемые данные + |
ПД+ |
От И к К |
|
Передаваемые данные - |
ПД- |
От П к И | |
|
Принимаемые данные |
Принимаемые данные + |
ПрД+ |
От П к И |
|
Принимаемые данные - |
ПрД- |
От И к П | |
|
Готовность приемника* |
Готовность приемника + |
ГП + |
От П к И |
|
Готовность приемника - |
ГП - |
От И к П |
______________
* Необязательная цепь.
2.7.4. Состоянию 1 в цепях взаимосвязи соответствуют ток от 15 до 25 мА, состоянию 0 - ток от 0 до 3 мА.
2.7.5. Соединяемые оконечные устройства (К и УВВ) имеют взаимно гальванически разделенное электрическое заземление. Гальваническое разделение осуществляется с той стороны цепи взаимосвязи, которая не питается током. Номинальное значение изоляционного напряжения гальванического разделения равно 500 В в течение 1 мин.
2.7.6. Цепи взаимосвязи должны обеспечивать передачу сигналов со скоростью 9600 бит/с на расстояние от 0 до 500 м.
При передаче на большие расстояния пропорционально понижается скорость передачи.
3. НОМЕНКЛАТУРА ИНТЕРФЕЙСОВ
3.1. Номенклатура интерфейсов - по табл.5.
Таблица 5
|
Вид связи |
Интерфейсы по пунктам |
|
Связь между СПУ и исполнительным устройством робота: |
|
|
выходные сигналы СПУ к электрическим исполнительным устройствам |
2.4 |
|
выходные сигналы от СПУ к гидравлическим исполнительным устройствам |
2.5 |
|
выходные сигналы СПУ к пневматическим исполнительным устройствам |
2.2 и 2.5 |
|
выходные сигналы от исполнительных устройств робота в СПУ |
2.1; 2.3. Допускается использовать другие сигналы в зависимости от применения в исполнительных устройствах робота датчиков внутренней информации. В технических условиях на СПУ конкретного типа следует указать, с какими датчиками внутренней информации данное СПУ может взаимодействовать |
|
Связь между СПУ и обслуживаемым роботом технологическим оборудованием: |
|
|
выходные сигналы от СПУ к технологическому оборудованию |
2.2 |
|
входные сигналы в СПУ от технологического оборудования |
2.1 |
|
связь между СПУ и датчиками внешней информации |
2.1; 2.3; 2.6 |
|
связь между СПУ и устройствами управления верхнего ранга, а также другими средствами цифровой техники |
2.6; 2.7 - связь между СПУ и линейной магистралью данных системы осуществляется при помощи коаксиального кабеля с волновым сопротивлением 75 Ом |
Личный кабинет:
доступно после авторизации Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...
Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2024 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке