
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
ноября
24
воскресенье,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
ГОСТ 20058-80
Группа Д00
ГОСУДАРСТВЕННЫЙ СТАНДАРТ СОЮЗА ССР
ДИНАМИКА ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АТМОСФЕРЕ
Термины, определения и обозначения
Aircraft dynamics in atmosphere. Terms, definitions and symbols
Дата введения 1981-07-01
Постановлением Государственного комитета СССР по стандартам от 30 июля 1980 г. N 3913 срок введения установлен с 01.07.1981 г.
ВЗАМЕН ГОСТ 20058-74, кроме пп.45-67
ВНЕСЕНЫ поправки, опубликованные в ИУС N 3, 1982 год, ИУС N 12, 1986 год
Поправки внесены изготовителем базы данных
Настоящий стандарт распространяется на летательные аппараты тяжелее воздуха, в основном самолеты.
Стандарт устанавливает применяемые в науке и технике термины, определения, обозначения осей координат и буквенные обозначения величин, относящиеся к динамике летательных аппаратов в атмосфере Земли и других планет.
Стандарт следует применять совместно с ГОСТ 22833-77 к и ГОСТ 23281-78
Термины, установленные настоящим стандартом, обязательны для применения в документации всех видов, научно-технической, учебной и справочной литературе.
Для каждого понятия установлен один стандартизованный термин. Применение терминов-синонимов стандартизованного термина запрещается.
Для отдельных стандартизованных терминов в стандарте приведены в качестве справочных краткие формы, которые разрешается применять, если исключена возможность их различного толкования. Установленные определения можно, при необходимости, изменять по форме изложения, не допуская нарушения границ понятий.
Если необходимые и достаточные признаки понятия содержатся в буквальном значении термина, определение не приведено и, соответственно, в графе "Определение" поставлен прочерк.
Для отдельных понятий стандартизованные термины отсутствуют и, соответственно, в графе "Термин" поставлен прочерк.
В стандарте приведен алфавитный указатель содержащихся в нем терминов.
В справочном приложении 1 приведены чертежи основных углов, используемых в динамике летательных аппаратов в атмосфере, в справочном приложении 2 - матрицы преобразования величин из одной системы координат в другую, в справочном приложении 3 - таблица соответствия обозначений осей координат и буквенных обозначений величин, установленных в данном стандарте и МС ИСО 1151, ч.I-V.
Стандартизованные термины набраны полужирным шрифтом, их краткая форма - светлым.
АЛФАВИТНЫЙ УКАЗАТЕЛЬ ТЕРМИНОВ
|
Динамика летательных аппаратов в атмосфере |
1 |
|
Коэффициент аэродинамической боковой силы |
91 |
|
Коэффициент аэродинамического момента крена |
96 |
|
Коэффициент аэродинамического момента рыскания |
97 |
|
Коэффициент аэродинамического момента тангажа |
98 |
|
Коэффициент аэродинамической нормальной силы |
87 |
|
Коэффициент аэродинамической подъемной силы |
90 |
|
Коэффициент аэродинамической поперечной силы |
88 |
|
Коэффициент аэродинамической продольной силы |
86 |
|
Коэффициент боковой силы |
91 |
|
Коэффициент лобового сопротивления |
89 |
|
Коэффициент момента крена |
96 |
|
Коэффициент момента рыскания |
97 |
|
Коэффициент момента тангажа |
98 |
|
Коэффициент нормальной силы |
87 |
|
Коэффициент подъемной силы |
90 |
|
Коэффициент поперечной силы |
88 |
|
Коэффициент продольной силы |
86 |
|
Коэффициент тяги |
95 |
|
Коэффициент эффективности органа управления креном |
123 |
|
Коэффициент эффективности органа управления рысканием |
124 |
|
Коэффициент эффективности органа управления тангажом |
122 |
|
Масса летательного аппарата |
45 |
|
Момент аэродинамический |
72 |
|
Момент инерции |
46 |
|
Момент инерции летательного аппарата относительно оси |
46 |
|
Момент инерции летательного аппарата центробежный |
47 |
|
Момент инерции центробежный |
47 |
|
Момент крена |
73 |
|
Момент крена |
76 |
|
Момент крена аэродинамический |
76 |
|
Момент результирующий |
70 |
|
Момент рыскания |
74 |
|
Момент рыскания |
77 |
|
Момент рыскания аэродинамический |
77 |
|
Момент тангажа |
75 |
|
Момент тангажа |
78 |
|
Момент тангажа аэродинамический |
78 |
|
Момент тяги |
71 |
|
Наклон ветра |
34 |
|
Ось боковая |
19 |
|
Ось нормальная |
12 |
|
Ось подъемной силы |
18 |
|
Ось поперечная |
13 |
|
Ось продольная |
11 |
|
Ось скоростная |
17 |
|
Перегрузка |
79 |
|
Перегрузка боковая |
85 |
|
Перегрузка нормальная |
81 |
|
Перегрузка нормальная скоростная |
84 |
|
Перегрузка поперечная |
82 |
|
Перегрузка продольная |
80 |
|
Перегрузка тангенциальная |
83 |
|
Радиус инерции |
48 |
|
Радиус инерции летательного аппарата относительно оси |
48 |
|
Сила аэродинамическая |
54 |
|
Сила боковая |
60 |
|
Сила боковая |
66 |
|
Сила боковая аэродинамическая |
66 |
|
Сила лобового сопротивления |
64 |
|
Сила нормальная |
56 |
|
Сила нормальная |
62 |
|
Сила нормальная аэродинамическая |
62 |
|
Сила планера аэродинамическая |
54 |
|
Сила подъемная |
59 |
|
Сила подъемная |
65 |
|
Сила подъемная аэродинамическая |
65 |
|
Сила поперечная |
57 |
|
Сила поперечная |
63 |
|
Сила поперечная аэродинамическая |
63 |
|
Сила продольная |
55 |
|
Сила продольная |
61 |
|
Сила продольная аэродинамическая |
61 |
|
Сила результирующая |
52 |
|
Сила тангенциальная |
58 |
|
Система координат земная |
3 |
|
Система координат земная нормальная |
4 |
|
Система координат инерциальная |
2 |
|
Система координат нормальная |
9 |
|
Система координат подвижная |
6 |
|
Система координат подвижная земная |
8 |
|
Система координат подвижная ориентированная |
7 |
|
Система координат полусвязанная |
14 |
|
Система координат связанная |
10 |
|
Система координат, связанная с пространственным углом атаки |
15 |
|
Система координат скоростная |
16 |
|
Система координат стартовая |
5 |
|
Система координат траекторная |
20 |
|
Скорость |
35 |
|
Скорость ветра |
39 |
|
Скорость земная |
37 |
|
Скорость крена |
42 |
|
Скорость летательного аппарата |
35 |
|
Скорость летательного аппарата угловая |
41 |
|
Скорость летательного аппарата угловая абсолютная |
40 |
|
Скорость путевая |
38 |
|
Скорость рыскания |
43 |
|
Скорость тангажа |
44 |
|
Скорость угловая |
41 |
|
Скорость угловая абсолютная |
40 |
|
Степень продольной статической устойчивости по перегрузке при свободном руле высоты |
112 |
|
Степень продольной статической устойчивости по перегрузке при свободном рычаге управления |
116 |
|
Степень продольной статической устойчивости по перегрузке при фиксированном руле высоты |
111 |
|
Степень продольной статической устойчивости по перегрузке при фиксированном рычаге управления |
115 |
|
Степень продольной статической устойчивости по скорости при свободном руле высоты |
114 |
|
Степень продольной статической устойчивости по скорости при свободном рычаге управления |
118 |
|
Степень продольной статической устойчивости по скорости при фиксированном руле высоты |
113 |
|
Степень продольной статической устойчивости по скорости при фиксированном рычаге управления |
117 |
|
Тяга |
53 |
|
Угол атаки |
21 |
|
Угол атаки пространственный |
23 |
|
Угол ветра |
33 |
|
Угол крена |
27 |
|
Угол крена аэродинамический |
24 |
|
Угол крена скоростной |
30 |
|
Угол наклона траектории |
32 |
|
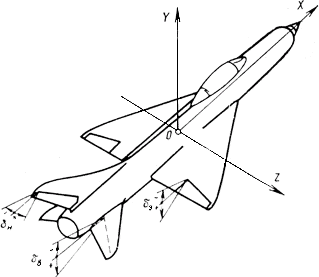
Угол отклонения органа управления креном |
50 |
|
Угол отклонения органа управления рысканием |
51 |
|
Угол отклонения органа управления тангажом |
49 |
|
Угол пути |
31 |
|
Угол рыскания |
25 |
|
Угол рыскания скоростной |
28 |
|
Угол скольжения |
22 |
|
Угол тангажа |
26 |
|
Угол тангажа скоростной |
29 |
|
Фокус |
99 |
|
Фокус по отклонению органа управления рысканием |
102 |
|
Фокус по отклонению органа управления тангажом |
101 |
|
Фокус по углу атаки |
99 |
|
Фокус по углу скольжения |
100 |
|
Центровка нейтральная по перегрузке при свободном руле высоты |
104 |
|
Центровка нейтральная по перегрузке при свободном рычаге управления |
108 |
|
Центровка нейтральная по перегрузке при фиксированном руле высоты |
103 |
|
Центровка нейтральная по перегрузке при фиксированном рычаге управления |
107 |
|
Центровка нейтральная по скорости при свободном руле высоты |
106 |
|
Центровка нейтральная по скорости при свободном рычаге управления |
110 |
|
Центровка нейтральная по скорости при фиксированном руле высоты |
105 |
|
Центровка нейтральная по скорости при фиксированном рычаге управления |
109 |
|
Эффективность органа управления креном |
120 |
|
Эффективность органа управления рысканием |
121 |
|
Эффективность органа управления тангажом |
119 |
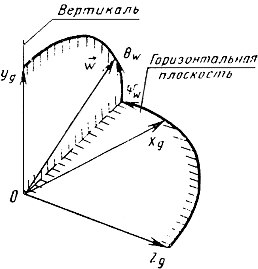
Углы, определяющие направление скорости летательного аппарата в связанной
системе координат и в системе координат, связанной с пространственным углом атаки
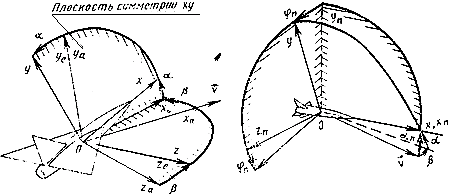
Черт.1
ПРИЛОЖЕНИЕ 2
Справочное
МАТРИЦЫ ПРЕОБРАЗОВАНИЯ ВЕЛИЧИН
ИЗ ОДНОЙ СИСТЕМЫ КООРДИНАТ В ДРУГУЮ
1. Преобразование величин и формирование матриц преобразования
Перевод величин из одной системы координат в другую может выполняться с помощью матрицы преобразования.
В зависимости от вида пересчитываемых величин различают:
преобразования составляющих вектора и соответствующих им коэффициентов;
преобразования моментов инерции и центробежных моментов инерции (составляющих тензора инерции);
преобразования производных
и применяют соответствующие им матрицы преобразований.
1.1. Преобразования составляющих вектора и соответствующих им коэффициентов
Преобразования составляющих вектора в системе координат ![]() в соответствующие величины в системе координат
в соответствующие величины в системе координат ![]() и обратно - для прямоугольных систем координат осуществляются с помощью соотношений:
и обратно - для прямоугольных систем координат осуществляются с помощью соотношений:
![]() ,
, ![]() ,
,![]() ,
, ![]() ,
,![]() ,
, ![]() .
.
В матричной форме записи соотношения имеют вид:
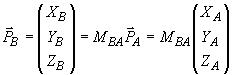 и
и 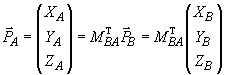 ,
,
где  ,
,
а ее транспонированная матрица
 .
.
Если ![]() ,
, ![]() ,
, ![]() - матрицы преобразования системы координат
- матрицы преобразования системы координат ![]() в
в ![]() ,
, ![]() в
в ![]() и
и ![]() в
в ![]() соответственно, то матрица преобразования системы координат
соответственно, то матрица преобразования системы координат ![]() в систему координат
в систему координат ![]() определяется произведением матриц третьего, второго и первого преобразований
определяется произведением матриц третьего, второго и первого преобразований
![]() .
.
Элементы ![]()
![]() (
(![]() =1, 2, 3;
=1, 2, 3; ![]() =1, 2, 3) матрицы преобразования
=1, 2, 3) матрицы преобразования ![]() и ее транспонированной матрицы
и ее транспонированной матрицы ![]() называются направляющими косинусами.
называются направляющими косинусами.
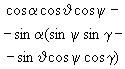
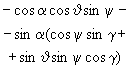
Они представляют собой функции углов поворота, с помощью которых система координат ![]() переводится в систему координат
переводится в систему координат ![]() . В применяемых здесь преобразованиях последовательные повороты осуществляются либо вокруг осей системы координат, либо вокруг линий узлов (осей систем в положениях, занимаемых ими перед очередными поворотами). Каждый последовательный поворот в положительном направлении представляется матрицей, в которой элемент на главной диагонали, соответствующий оси вращения, равен единице, а другие элементы соответствующей ему строки и столбца равны нулю. Два других элемента на главной диагонали равны косинусу угла поворота. В первой следующей за единицей строке оставшийся элемент равен синусу, а во второй - минус синусу угла поворота.
. В применяемых здесь преобразованиях последовательные повороты осуществляются либо вокруг осей системы координат, либо вокруг линий узлов (осей систем в положениях, занимаемых ими перед очередными поворотами). Каждый последовательный поворот в положительном направлении представляется матрицей, в которой элемент на главной диагонали, соответствующий оси вращения, равен единице, а другие элементы соответствующей ему строки и столбца равны нулю. Два других элемента на главной диагонали равны косинусу угла поворота. В первой следующей за единицей строке оставшийся элемент равен синусу, а во второй - минус синусу угла поворота.
Например, переход от нормальной к связанной системе координат осуществим тремя последовательными поворотами - на угол рыскания ![]() вокруг оси
вокруг оси ![]() , угол тангажа
, угол тангажа ![]() вокруг линии узлов
вокруг линии узлов ![]() и угол крена
и угол крена ![]() вокруг продольной оси
вокруг продольной оси ![]() . Матрица соответствующего преобразования определяется произведением матриц.
. Матрица соответствующего преобразования определяется произведением матриц.
 .
.
В ряде случаев переход от одной системы координат к другой осуществляется с помощью одного или двух элементарных преобразований.
В таблице приведены направляющие косинусы для наиболее часто используемых преобразований составляющих векторов.
Направляющие косинусы для преобразований составляющих векторов
|
|
Связанная система координат | |||
|
|
|
|
| |
|
Нормальная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скоростная |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Полусвязанная |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
0 |
0 |
1 |
|
|
Скоростная система координат | |||
|
|
|
|
| |
|
Нормальная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полусвязанная |
|
|
0 |
|
|
|
|
0 |
1 |
0 |
|
|
|
|
0 |
|
|
|
Нормальная система координат | |||
|
|
|
|
| |
|
Полусвязанная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициенты сил преобразуются с помощью таблиц направляющих косинусов так же, как составляющие сил и моментов, например,
![]() ;
;![]() ;
;![]()
![]() .
.
При преобразовании коэффициентов моментов учитывается различие характерных длин, используемых для приведения к безразмерному виду составляющих моментов в продольном и боковом движениях, например,
![]() .
.
1.2. Преобразование моментов инерции и центробежных моментов инерции
Моменты инерции и центробежные моменты инерции образуют тензор инерции, который представляется относительно системы координат ![]() симметричной матрицей
симметричной матрицей
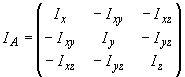 .
.
Тензор инерции в системе координат ![]() преобразуется в тензор инерции в системе координат
преобразуется в тензор инерции в системе координат ![]() соотношением
соотношением
![]() .
.
Например, тензор инерции летательного аппарата относительно связанной системы координат (плоскость ![]() совпадает с его плоскостью симметрии
совпадает с его плоскостью симметрии ![]() =0 и
=0 и ![]() =0), определяется относительно полусвязанной системы координат преобразованием
=0), определяется относительно полусвязанной системы координат преобразованием
 ,
,
выполнение которого дает
![]() ;
;![]() ;
;![]() ;
;![]() .
.
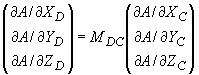
1.3. Преобразование производных
1.3.1. Переход от производных в одной системе координат к производным в другой системе координат осуществляется тремя различными видами преобразований, применяемыми в трех соответствующих случаях:
величины, от которых берутся производные, преобразуются, а по которым берутся производные, не преобразуются;
величины, от которых и по которым берутся производные, преобразуются;
величины, от которых берутся производные, не преобразуются, а по которым берутся производные, преобразуются.
1.3.2. Первому случаю (1.3.1) соответствует преобразование
![]() ,
,
а если ![]() не зависит от величины, по которой берется производная, то соответственно более простое преобразование
не зависит от величины, по которой берется производная, то соответственно более простое преобразование
![]() .
.
Например, производные по углу атаки от соответствующих сил в полусвязанной системе координат при переходе к связанной системе координат, определяются по выражению
 ,
,
откуда
![]() ;
;![]() ;
;![]() .
.
Более простым преобразованием будут определяться, например, соответствующие производные в связанной системе координат по заданным в полусвязанной системе координат производным по углу отклонения органов управления (или углу скольжения) от составляющих момента
![]() ;
;![]() ;
;![]() .
.
По соотношениям, аналогичным приведенным в п.1.3.2, будут определяться и коэффициенты соответствующих производных.
1.3.3. Второму случаю (1.3.1) соответствует преобразование
![]() .
.
Матрицами ![]() и
и ![]() в этом соотношении систематизированы производные в соответствующих системах координат от трех составляющих вектора по трем составляющим другого вектора, причем элементы каждой строки этих матриц представляют составляющие вектора, от которого берется, а элементы каждого столбца - по которому берется производная.
в этом соотношении систематизированы производные в соответствующих системах координат от трех составляющих вектора по трем составляющим другого вектора, причем элементы каждой строки этих матриц представляют составляющие вектора, от которого берется, а элементы каждого столбца - по которому берется производная.
Например, производные от составляющих моментов по составляющим угловой скорости, заданные в полусвязанной системе координат, преобразуются в соответствующие величины в связанной системе координат по выражению
 ,
,
откуда
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
1.3.4. Третьему случаю (1.3.1) соответствует преобразование
 .
.
1.4. Соотношения между углами атаки, скольжения, пространственным углом атаки и аэродинамическим углом крена имеют вид:
![]()
 ,
,  .
.
![]()
 ,
,  .
.
1.5. Соотношения между углами Эйлера и угловыми скоростями в связанной системе координат имеют вид:
![]()
![]()
![]()
и ![]()
![]()
![]() .
.
Пределы изменения углов:
![]()
![]()
![]()
ПРИЛОЖЕНИЕ 3
Справочное
Соответствие обозначений осей координат и буквенных обозначений величин,
установленных в данном стандарте и МС ИСО 1151, ч.I-V
|
Номер |
Термин |
Обозначение | |
|
|
|
по ГОСТ 20058-80 |
по МС ИСО 1151, ч.I-V |
|
3 |
Земная система координат, оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
Нормальная земная система координат, оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
Земная подвижная система координат, оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
Нормальная система координат, оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
Продольная ось |
|
|
|
12 |
Нормальная ось |
|
|
|
13 |
Поперечная ось |
|
|
|
17 |
Скоростная ось |
|
|
|
18 |
Ось подъемной силы |
|
|
|
19 |
Боковая ось |
|
|
|
21 |
Угол атаки |
|
|
|
22 |
Угол скольжения |
|
|
|
25 |
Угол рыскания |
|
|
|
26 |
Угол тангажа |
|
|
|
27 |
Угол крена |
|
|
|
28 |
Скоростной угол рыскания |
|
|
|
29 |
Скоростной угол тангажа |
|
|
|
30 |
Скоростной угол крена |
|
|
|
31 |
Угол пути |
|
|
|
32 |
Угол наклона траектории |
|
|
|
33 |
Угол ветра |
|
|
|
34 |
Наклон ветра |
|
|
|
35 |
Скорость летательного аппарата |
|
|
|
36 |
- |
|
|
|
37 |
Земная скорость |
|
|
|
|
Составляющие земной скорости по осям связанной системы координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
38 |
Путевая скорость |
|
- |
|
39 |
Скорость ветра |
|
|
|
40 |
Абсолютная угловая скорость летательного аппарата |
|
- |
|
41 |
Угловая скорость летательного аппарата |
|
|
|
42 |
Скорость крена |
|
|
|
43 |
Скорость рыскания |
|
|
|
44 |
Скорость тангажа |
|
|
|
45 |
Масса летательного аппарата |
|
|
|
46 |
Момент инерции летательного аппарата относительно оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
47 |
Центробежный момент инерции летательного аппарата |
|
|
|
|
|
|
|
|
|
|
|
|
|
48 |
Радиус инерции летательного аппарата относительно оси |
|
|
|
|
|
|
|
|
|
|
|
|
|
49 |
Угол отклонения органа управления тангажом |
- |
|
|
|
Угол отклонения руля высоты |
|
- |
|
50 |
Угол отклонения органа управления креном |
- |
|
|
|
Угол отклонения элеронов |
|
- |
|
51 |
Угол отклонения органа управления рысканием |
- |
|
|
|
Угол отклонения руля направления |
|
- |
|
52 |
Результирующая сила |
|
|
|
53 |
Тяга |
|
|
|
54 |
Аэродинамическая сила планера |
|
|
|
55 |
Продольная сила |
|
|
|
56 |
Нормальная сила |
|
|
|
57 |
Поперечная сила |
|
|
|
58 |
Тангенциальная сила |
|
|
|
59 |
Подъемная сила |
|
|
|
60 |
Боковая сила |
|
|
|
61 |
Аэродинамическая продольная сила |
|
|
|
62 |
Аэродинамическая нормальная сила |
|
|
|
63 |
Аэродинамическая поперечная сила |
|
|
|
64 |
Сила лобового сопротивления |
|
|
|
65 |
Аэродинамическая подъемная сила |
|
|
|
66 |
Аэродинамическая боковая сила |
|
|
|
70 |
Результирующий момент |
|
- |
|
71 |
Момент тяги |
|
- |
|
72 |
Аэродинамический момент |
|
- |
|
73 |
Момент крена |
|
|
|
74 |
Момент рыскания |
|
|
|
75 |
Момент тангажа |
|
|
|
76 |
Аэродинамический момент крена |
|
|
|
77 |
Аэродинамический момент рыскания |
|
|
|
78 |
Аэродинамический момент тангажа |
|
|
|
79 |
Перегрузка |
|
|
|
80 |
Продольная перегрузка |
|
|
|
81 |
Нормальная перегрузка |
|
|
|
82 |
Поперечная перегрузка |
|
|
|
83 |
Тангенциальная перегрузка |
|
|
|
84 |
Нормальная скоростная перегрузка |
|
|
|
85 |
Боковая перегрузка |
|
|
|
86 |
Коэффициент аэродинамической продольной силы |
|
|
|
87 |
Коэффициент аэродинамической нормальной силы |
|
|
|
88 |
Коэффициент аэродинамической поперечной силы |
|
|
|
89 |
Коэффициент лобового сопротивления |
|
|
|
90 |
Коэффициент аэродинамической подъемной силы |
|
|
|
91 |
Коэффициент аэродинамической боковой силы |
|
|
|
95 |
Коэффициент тяги |
|
- |
|
96 |
Коэффициент аэродинамического момента крена |
|
|
|
97 |
Коэффициент аэродинамического момента рыскания |
|
|
|
98 |
Коэффициент аэродинамического момента тангажа |
|
|
|
111 |
Степень продольной статической устойчивости по перегрузке при фиксированном руле высоты |
|
- |
|
112 |
Степень продольной статической устойчивости по перегрузке при свободном руле высоты |
|
- |
|
113 |
Степень продольной статической устойчивости по скорости при фиксированном руле высоты |
|
- |
|
114 |
Степень продольной статической устойчивости по скорости при свободном руле высоты |
|
- |
|
119 |
Эффективность органа управления тангажом |
- |
- |
|
|
Эффективность руля высоты |
|
- |
|
120 |
Эффективность органа управления креном |
- |
- |
|
|
Эффективность элеронов |
|
- |
|
121 |
Эффективность органа управления рысканием |
- |
- |
|
|
Эффективность руля направления |
|
- |
|
122 |
Коэффициент эффективности органа управления тангажом |
- |
|
|
|
Коэффициент эффективности руля высоты |
|
- |
|
123 |
Коэффициент эффективности органа управления креном |
- |
|
|
|
Коэффициент эффективности элеронов |
|
- |
|
124 |
Коэффициент эффективности органа управления рысканием |
- |
|
|
|
Коэффициент эффективности руля направления |
|
- |
Личный кабинет:
доступно после авторизации Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...
Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2024 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке