
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
ноября
21
четверг,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
ГОСТ ИСО 7626-2-94
Группа Т34
МЕЖГОСУДАРСТВЕННЫЙ СТАНДАРТ
Вибрация и удар
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ МЕХАНИЧЕСКОЙ
ПОДВИЖНОСТИ
Измерения, использующие одноточечное поступательное возбуждение
присоединенным вибровозбудителем
Vibration and shock. Experimental determination of mechanical mobility.
Measurements using single-point translation excitation with an attached vibration exciter
ОКС 17.160
ОКСТУ 0011
Дата введения 1997-01-01
Предисловие
1 РАЗРАБОТАН Российской Федерацией
ВНЕСЕН Техническим секретариатом Межгосударственного Совета по стандартизации, метрологии и сертификации
2 ПРИНЯТ Межгосударственным Советом по стандартизации, метрологии и сертификации (протокол N 6-94 от 21 октября 1994 г.)
За принятие проголосовали:
|
|
|
|
Азербайджанская Республика |
Азгосстандарт |
|
Республика Армения |
Армгосстандарт |
|
Республика Белоруссия |
Белстандарт |
|
Республика Грузия |
Грузстандарт |
|
Республика Казахстан |
Госстандарт Республики Казахстан |
|
Киргизская Республика |
Киргизстандарт |
|
Республика Молдова |
Молдовастандарт |
|
Российская Федерация |
Госстандарт России |
|
Республика Узбекистан |
Узгосстандарт |
|
Украина |
Госстандарт Украины |
3 Настоящий стандарт представляет собой полный аутентичный текст международного стандарта ИСО 7626-2-90 "Вибрация и удар. Экспериментальное определение механической подвижности. Измерения, использующие одноточечное поступательное возбуждение присоединенным вибровозбудителем"
4 Постановлением Комитета Российской Федерации по стандартизации, метрологии и сертификации от 28 июня 1996 г. N 439 межгосударственный стандарт ГОСТ ИСО 7626-2-94 введен в действие непосредственно в качестве государственного стандарта Российской Федерации с 1 января 1997 г.
5 ВВЕДЕН ВПЕРВЫЕ
Введение
Измерение подвижности, а также таких характеристик, как ускоряемость или динамическая податливость, как правило, является одним из этапов решения следующих задач:
- предсказание отклика объекта на известное входное возбуждение;
- определение модальных характеристик объекта (форм мод, собственных частот и коэффициентов демпфирования);
- описание динамического взаимодействия конструкций;
- проверка адекватности математических моделей;
- определение динамических свойств (комплексных модулей упругости) материалов.
Все положения настоящего стандарта справедливы как для измерения подвижности, так и таких характеристик, как ускоряемость и динамическая податливость, однако для простоты везде в тексте используется понятие подвижности. Для перехода от одной частотной характеристики к другой достаточно произвести соответствующие преобразования характеристик движения, например виброускорения в виброскорость.
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт является руководством для измерения входной и переходной механической подвижности и других частотных характеристик (ускоряемости, динамической податливости, свободной эффективной массы и т.п.) конструкций, таких как здания, машины и транспортные средства, с помощью прикрепляемого вибровозбудителя, создающего поступательное возбуждение в одной точке конструкции в течение всего времени измерения.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 24346-80 (СТ СЭВ 1926-79) Вибрация. Термины и определения
ГОСТ ИСО 7626-1-94 Вибрация и удар. Экспериментальное определение механической подвижности. Основные положения
3 ОПРЕДЕЛЕНИЯ
Общие термины и определения по вибрации - по ГОСТ 24346.
Термины, связанные с измерением механической подвижности и других частотных характеристик, - по ГОСТ ИСО 7626-1.
4 СОСТАВ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ
Системы для измерения подвижности состоят из элементов, подобранных из расчета выполнения конкретно поставленной задачи. Общие элементы таких систем и их соединения показаны на рисунке 1.
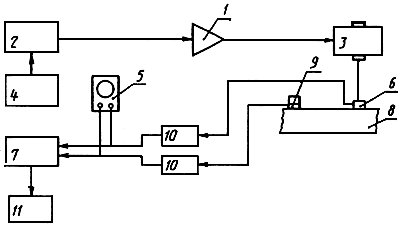
1 - усилитель мощности; 2 - устройство регулировки амплитуды;
3 - вибровозбудитель; 4 - генератор сигналов; 5 - контрольный осциллограф;
6 - преобразователь силы; 7 - анализатор; 8 - испытуемая конструкция;
9 - преобразователь вибрации; 10 - формирователь сигнала;
11 - графопостроитель или другой выходной прибор
Рисунок 1
5 ОПОРА ИСПЫТУЕМОЙ КОНСТРУКЦИИ
5.1 Общие положения
Измерения подвижности проводятся на конструкциях, находящихся либо в безопорном положении (в свободно подвешенном состоянии), либо в опорном положении (прикрепленных к одной или нескольким опорам) в зависимости от цели испытаний. Реакции связи, возникающие в результате использования вибровозбудителя, рассматриваются в 6.4.
5.2 Измерения на конструкциях в опорном положении
Опора испытуемой конструкции должна представлять собой нормальную опору в обычных условиях эксплуатации, за исключением случаев, оговариваемых особо. Описание опоры следует включать в протокол испытаний.
5.3 Измерения на конструкциях в безопорном положении
5.3.1 При испытаниях в безопорном положении следует использовать мягкий подвес. Значения соответствующих членов матрицы подвижности подвеса в точках крепления подвеса к испытуемой конструкции должны, по крайней мере, в десять раз превышать значения соответствующих членов матрицы подвижности конструкции в этих же самых точках. Сведения о системе подвеса должны быть занесены в протокол испытаний.
5.3.2 Используемый подвес должен удовлетворять условию, все резонансные частоты колебаний твердого тела на подвесе должны быть более чем в два раза меньше нижней границы частотного диапазона измерений.
5.3.3 Как правило, для мягкого подвеса используются амортизационные шнуры и упругие подушки из таких материалов, как пенопласт и резина. Поскольку некоторые системы подвеса обладают значительной массой, но малым демпфированием, необходимо убедиться, что резонансные частоты подвеса не совпадают с резонансными частотами самой испытуемой конструкции. Массы любых элементов подвеса, таких как крюки и стяжные гайки, расположенных близко к испытуемой конструкции, не должны превышать одной десятой свободной эффективной массы конструкции для каждой частоты из частотного диапазона измерений.
5.3.4 Следует проводить предварительные испытания для определения точек крепления подвеса с тем, чтобы последний оказывал как можно меньшее влияние на результаты измерений. Целесообразно выбирать точки крепления подвеса вблизи узловых точек конструкции. Шнуры подвеса должны быть расположены перпендикулярно к направлению возбуждения (если это возможно), хотя и в этом случае следует учитывать влияние на результаты измерений поперечной вибрации шнуров подвеса. Следует также принимать в расчет любое дополнительное демпфирование конструкции, вызываемое системой подвеса.
6 ВОЗБУЖДЕНИЕ
6.1 Общие положения
При измерениях подвижности возможно использование любой формы возбуждения, при которой спектр возбуждения покрывает частотный диапазон измерений.
При возбуждении гармонической силой на дискретных частотах или с медленным изменением (сканированием) частоты обработка сигналов наиболее проста: модуль частотной характеристики на данной частоте определяется как отношение амплитуды гармонического сигнала отклика к амплитуде возбуждения, а фаза - как разность фаз отклика и возбуждения. Недостатком такой формы возбуждения является длительное время испытаний, поскольку требуется время для получения на каждой частоте возбуждения установившегося отклика.
Скорость испытаний значительно увеличивается при использовании возбуждения со сложным спектром (импульсный сигнал с синусоидальным заполнением, синусоидальный сигнал с быстрой разверткой по частоте, периодические сигналы - случайный или с линейной частотной модуляцией - и пр.). В этом случае частотная характеристика определяется как отношение комплексного спектра сигнала отклика к комплексному спектру силы и для обработки сигналов используются различные виды преобразования Фурье.
6.2 Формы возбуждения
6.2.1 В настоящем стандарте рассматриваются только наиболее употребительные формы возбуждения. Для видов возбуждения, описанных в 6.2.5-6.2.8, в целях повышения достоверности результатов необходимо применять синхронное накопление сигналов.
6.2.2 Гармоническое возбуждение на дискретных частотах
Данное возбуждение представляет собой последовательный во времени набор отдельных синусоидальных сигналов с разными частотами, равномерно распределенными по частотному диапазону измерений. Выбор значения приращения частоты - в соответствии с 9.2.2. Длительность возбуждения на каждой частоте должна быть достаточной для достижения установившихся колебаний на данной частоте и проведения измерений, достаточных для соответствующей обработки сигналов.
6.2.3 Гармоническое возбуждение со сканированием частоты
Возбуждение данного типа имеет вид синусоиды с непрерывным изменением частоты от нижней до верхней границы частотного диапазона измерений - при этом в течение короткого промежутка времени энергия возбуждения концентрируется в узком частотном диапазоне. Скорость сканирования должна быть достаточно малой, чтобы достичь квазиустановившегося отклика конструкции. Указания по выбору скорости сканирования приведены в 9.2.3.
6.2.4 Стационарное случайное возбуждение
Возбуждение данного типа определяется статистическими характеристиками, такими как спектральная плотность мощности. Рекомендации по выбору спектральной плотности, с тем чтобы основная энергия возбуждения приходилась на частотный диапазон измерения, приведены в 9.4.3. При данном способе возбуждения, как и в последующих 6.2.5-6.2.8, все моды вибрации в пределах указанного частотного диапазона возбуждаются одновременно.
6.2.5 Псевдослучайное возбуждение
Возбуждающий сигнал синтезируется в цифровой форме в частотной области для придания ему нужной формы спектра. Для генерирования периодически повторяющихся цифровых сигналов используется обратное преобразование Фурье, после чего цифровые сигналы преобразуются в аналоговые электрические для управления вибровозбудителем.
6.2.6 Периодическое возбуждение с линейной частотной модуляцией
Сигнал возбуждения представляет собой синусоиду с частотой, периодически линейно изменяющейся во времени в пределах выбранного диапазона. Сигнал генерируется либо в цифровой форме, либо с помощью генератора развертки и синхронизируется с помощью сигнального процессора для усреднения (повышения отношения сигнал/шум).
6.2.7 Периодическое импульсное возбуждение
При данном возбуждении генерируется, как правило, в цифровом виде периодическая импульсная функция заданной формы. Форма импульса (обычно полусинусоида или ступенчатая функция) выбирается таким образом, чтобы удовлетворить требованиям к частотам возбуждения. Сигнальный процессор должен быть синхронизован с генератором сигналов.
6.2.8 Периодическое случайное возбуждение
В данном типе возбуждения сочетаются свойства случайного и псевдослучайного возбуждения в том смысле, что оно, удовлетворяя условию периодичности, все же изменяется со временем так, что воздействует на конструкцию чисто случайным образом. Это достигается использованием различных псевдослучайных возбуждений для каждого среднего значения
6.3 Вибровозбудители
6.3.1 Для воздействия на конструкцию определенной силой используют обычно следующие типы вибровозбудителей:
- электродинамические;
- электрогидравлические;
- пьезоэлектрические.
На рисунке 2 приведены ориентировочные частотные диапазоны типичных случаев применения для каждого типа вибровозбудителя.

1 - пьезоэлектрические вибровозбудители; 2 - электродинамические
вибровозбудители; 3 - электрогидравлические вибровозбудители
Рисунок 2
6.3.2 Применяемый вибровозбудитель должен обеспечивать создание достаточной силы и смещения так, чтобы измерения подвижности производились во всем частотном диапазоне измерений с необходимым отношением сигнал/шум. При использовании широкополосного случайного воздействия на конструкцию, как правило, требуется более мощный вибровозбудитель, нежели применяемый для гармонического возбуждения. Требования к мощности вибровозбудителя понижаются в случае использования временного усреднения сигналов возбуждения и отклика.
Примечание - Критерием правильности выбора вибровозбудителя может служить значение функции когерентности сигналов возбуждения и отклика. Правила определения функции когерентности - в приложении А.
6.3.3 Прилагаемая к конструкции возбуждающая сила приводит к появлению силы реакции, воздействующей на сам вибровозбудитель и передающейся на его опору, как показано на рисунках 3а и 3б. Если это необходимо, к вибровозбудителю следует прикреплять дополнительную массу. Недопустимой является такая установка вибровозбудителя, когда указанная сила реакции приводит к воздействию на саму испытуемую конструкцию не через преобразователь силы, а, например, через общую базу, на которой установлены конструкция и вибровозбудитель. Этот случай иллюстрирует рисунок 3в.
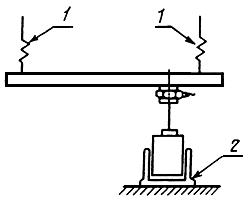
а) Реакция внешней опоры
1 - подвес конструкции; 2 - опора вибровозбудителя
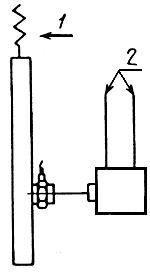
б) Реакция инерции вибровозбудителя
1 - подвес конструкции; 2 - подвес вибровозбудителя
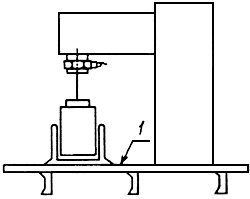
в) Пример неправильной установки вибровозбудителя
1 - общая опора конструкции и вибровозбудителя
Рисунок 3
6.4 Контроль посторонних воздействий на конструкцию
6.4.1 Общие положения
Основным требованием к измерению подвижности является то, что вынуждающая сила должна прилагаться в одном направлении и в одной точке конструкции. Любые паразитные моменты и силы (т.е. отличные от предназначенной вынуждающей силы, действующей в предназначенном направлении) приводят к погрешностям результатов измерений. В частности, точка возбуждения и другие измерительные точки конструкции должны свободно без ограничений перемещаться в любом направлении. Не следует допускать динамического взаимодействия между конструкцией и преобразователями силы и движения, так же как и взаимодействия между конструкцией и вибровозбудителем.
6.4.2 Влияние массы преобразователя
Паразитные силы возникают в каждой точке крепления преобразователя как результат движения с ускорением массы преобразователя. Погрешности измерения, вызванные влиянием массы преобразователя, должны быть сведены до минимума подбором преобразователя наименьшей массы, согласующимся с требованием к его коэффициенту преобразования. При измерении входной подвижности нагрузка преобразователем силы может быть скомпенсирована до определенного уровня электронным способом, как указано в 7.3.
6.4.3 Учет момента инерции преобразователя
Паразитные моменты возникают в каждой точке крепления преобразователей как результат углового ускорения преобразователей, особенно импедансных головок, которые обладают большим моментом инерции.
Такие паразитные воздействия должны быть сведены до минимума подбором преобразователей с малым моментом инерции относительно точки крепления преобразователя.
6.4.4 Ограничения на крепление вибровозбудителя
6.4.4.1 Паразитные моменты и поперечные силы возникают в точке крепления вибровозбудителя вследствие ограничений на угловую и поперечную составляющие вибрации в точке возбуждения. Так, влияние крепления системы вибровозбудитель - импедансная головка может отрицательно повлиять на измерения низкочастотных мод колебаний. Влияние устройств крепления особенно значительно и трудноустранимо при измерении подвижности легких конструкций.
6.4.4.2 Для уменьшения погрешностей измерения, вносимых креплением вибровозбудителей, значения поперечного и углового компонентов входной подвижности крепления (когда вибровозбудитель и устройство крепления не соединены с конструкцией) должны, по крайней мере, в десять раз превышать значения соответствующих членов матрицы подвижности самой конструкции во всем частотном диапазоне измерений.
6.4.4.3 Если проверка выполнения требований 6.4.4.2 представляет сложности, следует, по возможности, принять меры:
- использовать вибровозбудитель с "плавающей" звуковой катушкой;
- использовать такое устройство опоры вибровозбудителя, при котором реакция на силу, приложенную к конструкции, не будет зависеть ни от углового движения вибровозбудителя, ни от поперечных (относительно оси) движений преобразователя силы;
- использовать толкатель, соединяющий вибровозбудитель с преобразователем силы.
6.4.4.4 Толкатель должен иметь значительную жесткость в осевом направлении и достаточную гибкость по остальным направлениям. Для этого часто используются короткие тонкие стержни, однако применение толстых стержней с гибкими тонкими элементами на обоих концах может привести к лучшим результатам. Следует обратить особое внимание на соосность соединения вибровозбудителя, толкателя и преобразователя силы.
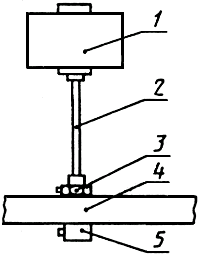
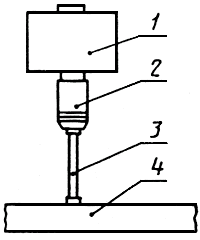
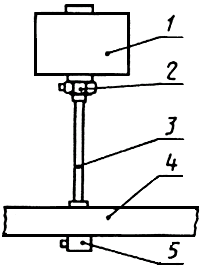
6.4.4.5 Преобразователь силы должен быть установлен так, чтобы он измерял силу, переданную через толкатель на конструкцию (рисунок 4а). Не допускается установка акселерометра на конструкцию через промежуточное устройство, например толкатель, осевая податливость которого приведет к неверным результатам измерения характеристик отклика (рисунок 4б). Следует соблюдать большую осторожность, размещая преобразователь силы на концы толкателя со стороны вибровозбудителя (рисунок 4в). Если возможно только такое соединение, как показано на рисунке 4в, следует учесть влияние податливости толкателя (как описано в ГОСТ ИСО 7626-1) и обеспечить компенсацию массы стержня в соответствии с 7.3. Допустимый вариант соединения с использованием толкателя и импедансной головки показан на рисунке 4г, но при этом следует помнить, что невозможно скомпенсировать момент вращения импедансной головки, который может оказать особенно большое влияние на измерения характеристик гибких конструкций.
1 - вибровозбудитель; 2 - толкатель; 3 - преобразователь силы;
4 - испытуемая конструкция; 5 - акселерометр
Рисунок 4а
1 - вибровозбудитель; 2 - импедансная головка;
3 - толкатель; 4 - испытуемая конструкция
Рисунок 4б
1 - вибровозбудитель; 2 - преобразователь силы; 3 - толкатель,
4 - испытуемая конструкция; 5 - акселерометр
Рисунок 4в
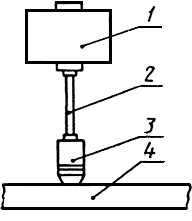
1 - вибровозбудитель; 2 - толкатель; 3 - импедансная головка;
4 - испытуемая конструкция
Рисунок 4г
Примечание - Моды изгибных колебаний толкателя, собственные частоты которых лежат внутри частотного диапазона измерений, могут оказать влияние на результаты измерения подвижности. Кроме того, изгибные колебания движущихся частей вибровозбудителя могут привести к передаче на конструкцию моментов сил, которые не могут быть измерены преобразователем силы, но которые могут повлиять на результаты измерений отклика.
6.4.4.6 Для более точного определения точки приложения силы может потребоваться применение сужающего конуса (устройства, уменьшающего площадь контакта).
Примечание - При установке сужающих конусов следует соблюдать осторожность, так как это может повлечь появление паразитных моментов.
7 ИЗМЕРЕНИЕ ВЫНУЖДАЮЩЕЙ СИЛЫ И ОТКЛИКА КОНСТРУКЦИИ
7.1 Общие положения
Основные критерии и требования к выбору преобразователей вибрации, силы и импедансных головок, а также способы определения характеристик этих преобразователей установлены в ГОСТ ИСО 7626-1. При выборе того или иного преобразователя особое внимание следует обратить на линейность его характеристик в заданном динамическом диапазоне и соответствие области рабочих частот частотному диапазону измерений.
Примечания
1 При измерениях частотных характеристик наиболее часто используются преобразователи пьезоэлектрического типа. Однако при использовании импульсного возбуждения определенным преимуществом обладают пьезорезистивные акселерометры.
2 Как правило, в качестве преобразователей вибрации используются пьезоакселерометры, однако могут применяться и преобразователи скорости или смещения, поскольку любой из параметров вибрации (перемещение, скорость и ускорение) может быть определен с помощью преобразователя любого типа. Это достигается преобразованием характеристик на определенной частоте ![]() друг в друга с помощью множителя, представляющего собой степень числа
друг в друга с помощью множителя, представляющего собой степень числа ![]() ,
, ![]() - мнимая единица. Преимуществом некоторых преобразователей смещения является их бесконтактная работа.
- мнимая единица. Преимуществом некоторых преобразователей смещения является их бесконтактная работа.
7.2 Крепление преобразователей
7.2.1 Как правило, используются два способа крепления к конструкции преобразователей силы и вибрации: на шпильку с нанесенной резьбой и с помощью клеящего состава.
7.2.2 Если поверхность конструкции в месте установки преобразователя не является ровной, следует применять металлические монтажные фланцы соответствующей формы.
7.2.3 Для улучшения сцепления поверхностей преобразователя и конструкции и более точного измерения высокочастотных составляющих рекомендуется на место контакта преобразователя с поверхностью нанести тонкий слой вязкой жидкости. Следует учитывать влияние податливости крепления, как указано в ГОСТ ИСО 7626-1.
7.2.4 Момент затяжки преобразователей силы на шпильках должен соответствовать рекомендациям изготовителя. Возбуждающая сила должна передаваться, насколько это возможно, непосредственно через преобразователь силы или импедансную головку с минимально достижимым уровнем помех.
7.3 Инерционная нагрузка и компенсация массы
Нагрузку массы преобразователей и крепежных приспособлений на конструкцию в точке возбуждения целесообразно, особенно для легких конструкций, компенсировать электронным способом. Такая компенсация эффективна, когда значение входной подвижности испытуемой конструкции превышает 0,01/![]() для всех частот
для всех частот ![]() , Гц, в пределах частотного диапазона измерений; масса
, Гц, в пределах частотного диапазона измерений; масса ![]() , кг, есть сумма массы крепежных приспособлений и эффективной инерционной массы преобразователя силы или импедансной головки, как указано в ГОСТ ИСО 7626-1.
, кг, есть сумма массы крепежных приспособлений и эффективной инерционной массы преобразователя силы или импедансной головки, как указано в ГОСТ ИСО 7626-1.
При невыполнении указанного критерия целесообразно воспользоваться процедурой, известной как "исключение массы". Суть ее в следующем. Производится умножение, в цифровой либо аналоговой форме, сигнала виброускорения в точке возбуждения на массу, которую необходимо компенсировать. Полученный после этого сигнал также в аналоговой или цифровой форме вычитается из сигнала преобразователя силы, в результате чего получается сигнал "чистой" вынуждающей силы, действующей на конструкцию.
Примечания
1 Если под преобразователем силы в точке возбуждения установлен акселерометр (как на рисунке 4б), то его масса также должна учитываться при определении полной массы ![]() .
.
2 При измерении переходной подвижности, для того чтобы воспользоваться процедурой "исключения массы", необходимо дополнительно устанавливать акселерометр в точке возбуждения.
3 Процедура "исключения массы" может компенсировать только поступательную инерционную нагрузку на конструкцию; угловая нагрузка и прочие паразитные сигналы могут быть только уменьшены путем подбора преобразователей с низкими инерционными свойствами. Нескомпенсированные инерционные нагрузки способны вызвать смещение пиков частотной характеристики.
4 При исключении влияния паразитных нагрузок на конструкцию приоритет следует отдавать подбору преобразователей и крепежных приспособлений перед использованием метода "исключения массы". Кроме того, указанный метод следует, во избежание больших погрешностей измерения, применять только в случаях, когда отношение эффективной массы крепежных приспособлений и преобразователей к свободной эффективной массе испытуемой конструкции в точке возбуждения находится в диапазоне от 0,06 до 0,5.
7.4 Усилители сигнала
Применение пьезоэлектрических преобразователей силы и вибрации требует использования усилителей зарядов или усилителей напряжения с большим входным сопротивлением.
Примечания
1 Некоторые пьезоэлектрические преобразователи имеют встроенные электрические схемы и требуют применения усилителей, согласованных с этими схемами.
2 На коэффициент преобразования усилителя напряжения может влиять сопротивление кабеля преобразователя. Усилители напряжения имеют более строгие ограничения по низкочастотной характеристике, чем усилители заряда.
7.5 Калибровка
7.5.1 Требования к основным и дополнительным калибровкам преобразователей содержатся в ГОСТ ИСО 7626-1. Основные калибровки преобразователей всех видов следует производить один раз в год.
7.5.2 Ежедневно в начале и в конце серии испытаний проводится рабочая калибровка полной измерительной системы. Рабочая калибровка выполняется путем измерения подвижности (ускоряемости) свободно подвешенного калибровочного блока известной массы. Все элементы измерительной системы должны быть соединены точно так же, как и при проведении испытаний. Измеренное значение частотной характеристики калибровочного блока должно иметь отклонение в пределах ±5% от ее известного истинного значения (например, для ускоряемости это значение равно 1/![]() , а для подвижности - 1/(2
, а для подвижности - 1/(2![]() );
); ![]() - известная масса калибровочного блока). При рабочей калибровке необходимо использовать те же крепежные приспособления, что и при испытаниях, так чтобы можно было определить любые погрешности, вызванные податливостью креплений (см. ГОСТ ИСО 7626-1). Масса калибровочного блока должна выбираться таким образом, чтобы ее подвижность соответствовала диапазону подвижностей, получаемых в результате испытаний. При необходимости следует проводить несколько рабочих калибровок для калибровочных блоков разной массы с тем, чтобы охватить весь диапазон изменения частотной характеристики.
- известная масса калибровочного блока). При рабочей калибровке необходимо использовать те же крепежные приспособления, что и при испытаниях, так чтобы можно было определить любые погрешности, вызванные податливостью креплений (см. ГОСТ ИСО 7626-1). Масса калибровочного блока должна выбираться таким образом, чтобы ее подвижность соответствовала диапазону подвижностей, получаемых в результате испытаний. При необходимости следует проводить несколько рабочих калибровок для калибровочных блоков разной массы с тем, чтобы охватить весь диапазон изменения частотной характеристики.
8 ОБРАБОТКА СИГНАЛОВ ПРЕОБРАЗОВАТЕЛЕЙ
8.1 Определение частотной характеристики
8.1.1 Общие положения
В процессе обработки сигналов вибрации и силы осуществляются их фильтрация, процедура "исключения массы" (при необходимости) и вычисление отношения "очищенных" сигналов и фазового угла между ними как функций частоты. Анализатор, осуществляющий обработку, может использоваться также для преобразования измеренной частотной характеристики в частотную характеристику другого вида (например преобразования ускоряемости в подвижность). В настоящем пункте рассматриваются особенности обработки сигналов в зависимости от типа возбуждения.
8.1.2 Гармоническое возбуждение
Значение амплитуды частотной характеристики на частоте возбуждения определяется в аналоговом или цифровом виде как отношение амплитуд сигналов вибрации и силы. Фаза частотной характеристики определяется путем измерения разности фаз между этими сигналами.
Примечание - Если используется гармоническое возбуждение со скачкообразно изменяемой частотой, то в данной серии измерений можно получить с помощью одноканальной системы измерений значения нескольких частотных характеристик, переключая канал с одного преобразователя на другой. В случае же гармонического возбуждения с медленной разверткой частоты для одной серии измерений можно получить только одну частотную характеристику на каждый канал измерительной системы.
8.1.3 Многочастотное возбуждение
Сигналы преобразователя, генерируемые случайным, псевдослучайным, периодически случайным, периодическим с линейной частотной модуляцией или импульсным возбуждениями, обрабатываются цифровыми анализаторами, осуществляющими преобразование Фурье. Частотная характеристика получается в результате деления взаимной спектральной плотности сигналов вибрации и силы на собственную спектральную плотность вынуждающей силы, при этом сигналы вибрации и силы подвергаются предварительной обработке во временной области (взвешиванию), как показано в 8.4.3. Для того чтобы полученная оценка частотной характеристики попадала в заданный доверительный интервал, производится усреднение спектров по выборке соответствующего объема (см. приложение А).
Примечания
1 При измерениях переходной подвижности иногда невозможно достичь заданной точности, особенно когда отклик измеряется в точке и направлении, соответствующих малым значениям переходной подвижности. В подобных случаях незначительный эффект приносит и дальнейшее увеличение числа усредняемых спектров.
2 Для получения одной частотной характеристики при данном способе возбуждения необходимо использовать, по крайней мере, двухканальный Фурье-анализатор. При необходимости одновременного измерения нескольких частотных характеристик число каналов должно быть увеличено.
8.2 Фильтрация
8.2.1 Гармоническое возбуждение
Для уменьшения погрешностей измерения вычисления частотной характеристики должны проводиться с использованием составляющих вибрации и силы только на частоте возбуждения. Поэтому целесообразно применять синхронное накопление сигналов или использовать фильтры, не вносящие в сигнал частотных искажений.
Примечание - Для целей фильтрации обычно используется следящий фильтр - согласованное по фазе узкополосное аналоговое устройство, использующее гетеродинный принцип автоматической подстройки под частоту входного сигнала. В случае реализации принципа синхронного накопления (суммирование синхронной с частотой входного сигнала выборки значений сигнала) обычно используются цифровые устройства.
8.2.2 Многочастотное возбуждение
В данном случае повышения отношения сигнал/шум можно добиться за счет ограничения полосы анализа и использования соответствующих фильтров, как указано в 9.4.3. При использовании цифровых анализаторов во избежание погрешностей, вносимых составляющими сигнала на частотах выше верхней границы анализируемого диапазона, необходимо применять согласованные по фазе сглаживающие фильтры с высокой крутизной характеристики в области верхней частоты среза.
Для возбуждения периодической силой эффективной является процедура синхронного накопления.
8.3 Согласование по динамическому диапазону сигнала
Для обеспечения правильности измерений необходимо систематически проверять настройки усиления, позволяющие избежать ограничения сигнала. Индикатор перегрузки анализатора реагирует только на превышение уровня сигнала в самом анализаторе, поэтому, как показано на рисунке 1, для контроля сигналов на предшествующих анализатору стадиях обработки используется осциллограф. Ограничение сигнала может быть определено визуально по появлению среза формы сигнала на экране осциллографа.
8.4 Разрешение по частоте
8.4.1 Разрешение по частоте должно быть достаточно высоким для того, чтобы выявить все собственные частоты испытуемой конструкции в частотном диапазоне намерений и получить точную оценку модального демпфирования.
8.4.2 Гармоническое возбуждение
Для разрешения резонансных частот при синусоидальном возбуждении с медленным сканированием или скачкообразно изменяющейся частотой необходимо, чтобы скорость изменения частоты возбуждения была достаточно мала (см. 9.2).
8.4.3 Многочастотное возбуждение
Для получения достаточного разрешения по частоте при возбуждении, описанном в 5.2.4-5.2.8, требуется обеспечить достаточно малую дискретизацию по частоте при использовании дискретного преобразования Фурье. Требуемое спектральное разрешение (расстояние между соседними составляющими в спектре) определяется плотностью расположения мод конструкции и коэффициентами модального демпфирования. Спектральное разрешение (в герцах) обратно пропорционально длительности обрабатываемой записи сигнала (в секундах).
Примечания
1 Ограничение длины записи (размера блока выборки сигнала) приводит к уширению реальных составляющих спектра и появлению боковых гармоник. Данный эффект может быть уменьшен благодаря умножению сигнала на подходящую весовую функцию, например окно Ханна (хэннинг).
2 Случайное возбуждение можно рассматривать как последовательность импульсных функций во времени. Тогда ясно, что данные в начале блока выборки сигнала отклика представляют собой, главным образом, результат предшествующего возбуждения, в то же время в конце блока выборки данные отклика на соответствующий импульс возбуждения усечены. Это приводит к тому, что когерентность сигналов возбуждения и отклика в начале и в конце блока выборки низка; в некоторых случаях повышения когерентности можно достичь за счет использования окон Ханна. Сказанное не относится к периодическому возбуждению, поскольку при данном виде возбуждения происходит согласование данных в конце и начале блока выборки и спустя некоторое время в каждом блоке данных сигнала отклика присутствует вся информация о сигнале возбуждения.
9 УПРАВЛЕНИЕ ВОЗБУЖДЕНИЕМ
9.1 Общие положения
Управление возбуждением заключается в регулировании длительности и амплитуды возбуждения. Изменением длительности возбуждения добиваются получения требуемого разрешения по частоте, а управление амплитудой возбуждения необходимо, как правило, для его соответствия динамическому диапазону измерительной системы.
9.2 Длительность гармонического возбуждения
9.2.1 Общие положения
При гармоническом возбуждении со сканированием частоты или при возбуждении на дискретных частотах необходимо управление скоростью изменения частоты возбуждения или длительностью возбуждения на одной частоте и значением частотного приращения. С его помощью должна обеспечиваться высокая разрешающая способность в окрестностях резонансов (пики частотной характеристики) и антирезонансов (впадины частотной характеристики) для точного определения модальных параметров конструкции.
9.2.2 Гармоническое возбуждение на дискретных частотах
Если частота гармонического возбуждения изменяется дискретно с некоторым шагом, то разница между истинной резонансной частотой конструкции и ближайшей к ней частотой возбуждения составит не более половины этого шага, т.е. максимальная погрешность при определении резонансной частоты составляет половину приращения частоты. Такое несовпадение частот возбуждения и резонанса может привести к занижению пикового значения характеристики и завышению, в свою очередь, коэффициента модального демпфирования. Приращение частоты в диапазоне, пределы которого ограничены значениями ±10% резонансной частоты, следует выбирать таким образом, чтобы погрешности измерения пикового значения характеристики и коэффициента модального демпфирования находились в пределах 5%. Уравнения, определяющие максимальное приращение по частоте, которое удовлетворяет данным требованиям, приведены в приложении Б. В нем указывается также минимальное время возбуждения на каждой частоте (время выдержки). Для частот, находящихся за пределами диапазона с границами ±10% резонансной или антирезонансной частоты, можно использовать большие приращения частоты или меньшее время выдержки. В таблице 1 приведена максимальная погрешность измерения отклика конструкции при резонансе в зависимости от приращения частоты.
Таблица 1
|
|
| |
|
|
% |
дБ |
|
>1 |
>29,3 |
>3,0 |
|
1 |
29,3 |
3,0 |
|
1/2 |
10,6 |
1,0 |
|
1/3 |
5,1 |
0,5 |
|
1/4 |
3,0 |
0,3 |
|
1/5 |
1,9 |
0,2 |
|
1/6 |
1,4 |
0,1 |
|
1/7 |
1,0 |
0,1 |
|
1/8 |
0,7 |
0,1 |
|
| ||
9.2.3 Гармоническое возбуждение с медленным сканированием частоты
При данном виде возбуждения частота должна изменяться как линейная или логарифмическая функция времени. Во всех случаях скорость развертки должна подбираться таким образом, чтобы в частотном диапазоне с границами ±10% резонансной частоты погрешность измерения отклика не превышала 5%.
При линейном сканировании максимальная скорость изменения частоты ![]() , Гц/мин, определяется выражением
, Гц/мин, определяется выражением
![]() . (1)
. (1)
При логарифмическом сканировании максимальная скорость сканирования ![]() , октава/мин, определяется выражением
, октава/мин, определяется выражением
![]() , (2)
, (2)
где ![]() - расчетная резонансная частота;
- расчетная резонансная частота;
![]() - расчетное значение добротности соответствующей моды.
- расчетное значение добротности соответствующей моды.
9.3 Длительность многочастотного возбуждения
Длительности возбуждения и измерения отклика должны быть достаточными, чтобы иметь возможность произвести усреднение по набору спектров, как указано в 8.1.3. Число усредняемых спектров представляет собой функцию отношения сигнал/шум измерительной системы и должно обеспечить попадание случайной погрешности измерений в 5%-й интервал с вероятностью 90%. Для определения необходимого в соответствии с данным критерием количества спектров используется функция когерентности между сигналами возбуждения и отклика, как показано в приложении А. Время возбуждения (в секундах), необходимое для получения каждого спектра, является величиной, обратной спектральному разрешению (в герцах) дискретного преобразования Фурье в соответствии с 8.4.3.
9.4 Динамический диапазон
9.4.1 Общие положения
Для конструкций с малым демпфированием разброс значений механической подвижности во всем частотном диапазоне измерений может превышать 100 дБ (10![]() :1). В то же время для каждого канала передачи данных помимо верхней границы, за которой наступает ограничение сигнала, существует также и нижняя граница, связанная с наличием помех в системе измерения, а также - для цифровых систем - погрешностей, связанных с аналого-цифровым преобразованием. Для обеспечения точности измерений возбуждение должно быть таким, чтобы продуцируемые сигналы силы и вибрации не выходили за указанные границы своих каналов измерения.
:1). В то же время для каждого канала передачи данных помимо верхней границы, за которой наступает ограничение сигнала, существует также и нижняя граница, связанная с наличием помех в системе измерения, а также - для цифровых систем - погрешностей, связанных с аналого-цифровым преобразованием. Для обеспечения точности измерений возбуждение должно быть таким, чтобы продуцируемые сигналы силы и вибрации не выходили за указанные границы своих каналов измерения.
9.4.2 Гармоническое возбуждение
При постоянной амплитуде вынуждающей силы максимально достижимый динамический диапазон измерения подвижности определяется динамическим диапазоном канала измерения отклика (для существующих измерительных систем данное значение близко к 50 дБ или 300:1). Для того чтобы расширить диапазон измеряемой характеристики, необходимо уменьшить амплитуду возбуждения в окрестностях резонансной частоты (пикового значения отклика) и увеличить в окрестностях антирезонансной частоты (впадины кривой характеристики отклика). На рисунке 5а показаны ограничения динамического диапазона измерений и искажения частотной характеристики, возникающие при возбуждении с постоянной амплитудой: уменьшение пиковых значений вследствие ограничения сигнала и подъем впадин вследствие наличия шума. На рисунке 5б проиллюстрировано правильное управление амплитудой вынуждающей силы в соответствии с диапазоном изменения измеряемой частотной характеристики.

Рисунок 5
9.4.3 Многочастотное возбуждение
Для данной формы возбуждения справедливы все положения 9.4.2. В целях разгрузки канала измерения и исключения дополнительных помех следует ограничивать спектр возбуждения в соответствии с частотным диапазоном измерения. Необходимым условием является резкое обрезание спектра возбуждения на верхней частоте измерений. Если для улучшения разрешения по частоте выполняется анализ в ограниченной полосе частот, спектр возбуждения также должен быть сосредоточен в этой полосе частот.
10 КОНТРОЛЬ ПРАВИЛЬНОСТИ ВЫПОЛНЕНИЯ ИЗМЕРЕНИЙ
10.1 Для проверки правильности выполнения измерений по различным критериям проводятся дополнительные испытания. В приложении А установлены виды таких испытаний для соответствующих критериев.
10.2 Если результаты измерений отображаются графопостроителем на миллиметровой бумаге, как установлено ГОСТ ИСО 7626-1, следует проверить правильность совмещения миллиметровой бумаги и графопостроителя с помощью методики, существующей для данного графопостроителя.
ПРИЛОЖЕНИЕ А
(обязательное)
КОНТРОЛЬ ПРАВИЛЬНОСТИ ВЫПОЛНЕНИЯ ИЗМЕРЕНИЙ
А.1 Когерентность
При воздействии на конструкцию негармоническим возбуждением (см. 6.2.4-6.2.8) следует рассчитывать функцию когерентности ![]() между сигналами силы и вибрации для контроля возможных погрешностей измерений частотной характеристики. Функция когерентности определяется выражением
между сигналами силы и вибрации для контроля возможных погрешностей измерений частотной характеристики. Функция когерентности определяется выражением
 , (А.1)
, (А.1)
где ![]() - взаимный спектр мощности между вынуждающей силой (входной сигнал) и откликом конструкции (выходной сигнал);
- взаимный спектр мощности между вынуждающей силой (входной сигнал) и откликом конструкции (выходной сигнал);
![]() ,
, ![]() - спектры мощности входного и выходного сигналов.
- спектры мощности входного и выходного сигналов.
При расчете функции когерентности необходимо производить усреднение, как минимум, по двум выборкам.
Значение функции когерентности, как следует из определения, находится в пределах: ![]() . На рисунке A.1 изображен график типичной функции когерентности.
. На рисунке A.1 изображен график типичной функции когерентности.
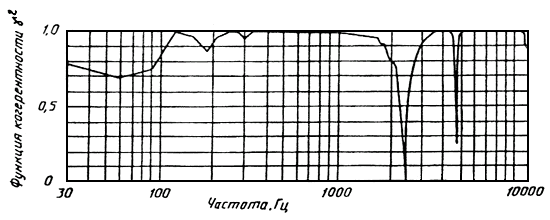
Рисунок А.1
Если значения функции когерентности значительно отличаются от единицы, это может указывать на одну из следующих проблем.
а) Впадины функции когерентности на резонансных и антирезонансных частотах могут быть вызваны такими причинами:
- неадекватность разрешающей способности по частоте (т.е. ширина полосы при анализе слишком велика), которая приводит к погрешностям измерения функции отклика (см. 8.4.3);
- в анализаторе используется неадекватное взвешивание во временной области (см. 8.4.3);
- испытуемая конструкция обладает нелинейностью или происходит ограничение сигнала усилителями (см. 8.3);
- на конструкцию воздействует несколько вынуждающих сил;
- воздействие шума измерительного тракта (может быть вызвано неправильным заданием входного воздействия вибровозбудителя) или погрешности аналого-цифрового преобразования.
б) Впадины функции когерентности на резонансных частотах могут также указывать на то, что на этих частотах происходит падение вынуждающей силы, вызванное особенностью конструкции самого вибровозбудителя. Если входной сигнал не превышает шумовой границы, значение частотной характеристики, вычисленное в соответствии с 8.1.3, окажется заниженным.
в) Низкая когерентность в широком диапазоне частот указывает на малое отношение сигнал/шум. Она часто вызвана неадекватностью возбуждения динамическому диапазону и может быть улучшена путем соответствующего формирования спектра возбуждения (см. 9.4). Повысить отношение сигнал/шум можно также за счет синхронного накопления сигнала во временной области.
г) Низкая когерентность на произвольном участке частотного диапазона измерений может также быть вызвана определенного вида нелинейностью конструкции.
Низкое отношение сигнал/шум приводит к случайным погрешностям в вычислениях частотной характеристики. Данную погрешность можно уменьшить путем усреднения в частотной области. Минимальное число усредняемых спектров, необходимое для того, чтобы случайная погрешность с вероятностью 90% не превышала заданное значение, можно определить, используя данные, приведенные на рисунке А.2. Это число зависит от измеренного значения функции когерентности.
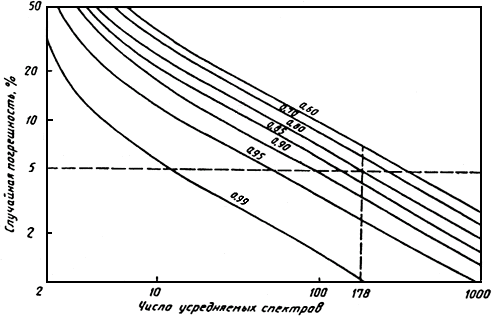
Рисунок А.2
Например, при значении функции когерентности 0,80 число спектров, по которым нужно провести усреднение, чтобы обеспечить попадание погрешности в 5%-й интервал с вероятностью 90%, должно быть не меньшим 178.
А.2 Линейность
Наличие болтовых соединений, зазоров между опорой и конструкцией и прочие особенности реальных конструкций могут вызвать нелинейность отклика. Для проверки наличия эффектов нелинейности необходимо проводить соответствующие испытания в каждой серии измерений.
Испытание на линейность состоит в следующем. Сначала проводят обычное измерение частотной характеристики с помощью выбранного вида возбуждения. После этого измерения повторяют, значительно увеличивая или уменьшая амплитуду возбуждения. Если результаты измерений частотной характеристики в обоих экспериментах совпадают, значит в данном диапазоне возбуждений нелинейные эффекты отсутствуют. В противном случае необходимо выяснить причину несовпадения результатов и постараться устранить ее.
А.3 Принцип взаимности
Принцип взаимности в применении к испытаниям на подвижность линейных упругих конструкций означает равенство соответствующих членов матрицы подвижности. Допустим, произведено измерение ![]() , которое устанавливает комплексное отношение виброскорости в точке конструкции
, которое устанавливает комплексное отношение виброскорости в точке конструкции ![]() к вынуждающей силе, прилагаемой в точке
к вынуждающей силе, прилагаемой в точке ![]() на частоте
на частоте ![]() . Выполнение принципа взаимности означает соблюдение равенства
. Выполнение принципа взаимности означает соблюдение равенства ![]() , где новое измерение
, где новое измерение ![]() обозначает отношение виброскорости в точке
обозначает отношение виброскорости в точке ![]() , измеренной в направлении предыдущего возбуждения, к силе, прилагаемой в точке
, измеренной в направлении предыдущего возбуждения, к силе, прилагаемой в точке ![]() в направлении предыдущего измерения вибрации. Если в ходе проверки устанавливается выполнение принципа взаимности, это служит признаком того, что для испытаний используются соответствующая аппаратура и методика.
в направлении предыдущего измерения вибрации. Если в ходе проверки устанавливается выполнение принципа взаимности, это служит признаком того, что для испытаний используются соответствующая аппаратура и методика.
Следует иметь в виду, что хотя принцип взаимности выполняется для большинства конструкций, некоторые элементы, например гидродинамические подшипники, могут ему не подчиняться.
А.4 Сопоставление измерений входной и переходной подвижностей
Для любой входной частотной характеристики обязательно наличие антирезонанса между каждой парой резонансов, что не всегда имеет место для переходных характеристик. Если при измерениях входной частотной характеристики какой-либо антирезонанс между смежными резонансами отсутствует, это является признаком несовершенства испытательной установки (например небольшого смещения положения преобразователя вибрации относительно преобразователя силы), которое следует устранить.
Другой вид проверки правильности измерений входной подвижности основан на том, что фаза частотной характеристики должна всегда находиться от минус 90° до плюс 90°. Фазовые же углы переходных подвижностей могут лежать в любом из четырех квадрантов.
Примечание - Антирезонанс может не наблюдаться в области высоких частот, где плотность резонансов велика. Это следует учитывать при оценке качества измерений.
ПРИЛОЖЕНИЕ Б
(обязательное)
ТРЕБОВАНИЯ К ПРИРАЩЕНИЮ ЧАСТОТЫ И ДЛИТЕЛЬНОСТИ
ВОЗБУЖДЕНИЯ
Б.1 Приращение частоты
Для точного определения отклика конструкции на любой из резонансных частот необходимо проводить измерения отклика на нескольких частотах в окрестности резонансной частоты. Погрешность, появляющаяся вследствие возбуждения на конечном числе равномерно расположенных частот, будет находиться от нуля до значений, приведенных в таблице 1 (9.2.2), в зависимости от того, совпадает ли резонансная частота с одной из испытательных частот (нулевая погрешность) или находится посередине между двумя соседними частотами возбуждения (максимальная погрешность).
Чтобы использовать таблицу 1 (9.2.2) для определения максимально возможного приращения частоты в окрестностях резонансной частоты ![]() , необходимо знать значение ширины резонансной кривой
, необходимо знать значение ширины резонансной кривой ![]() на уровне половинной мощности. Величина
на уровне половинной мощности. Величина ![]() связана с резонансной частотой и добротностью конструкции на резонансной частоте
связана с резонансной частотой и добротностью конструкции на резонансной частоте ![]() соотношением
соотношением
![]() , (Б.1)
, (Б.1)
Если погрешность не должна превышать 5% значения частотной характеристики на резонансной частоте, то максимальное приращение частоты в пределах ±10% резонансной частоты должно быть меньше 0,32 В.
Примечание - Хотя таблица составлена для случая гармонического возбуждения, ее можно использовать также и при многочастотном возбуждении для определения спектрального разрешения, которое должен обеспечивать Фурье-анализатор.
Б.2 Длительность возбуждения
После каждого скачкообразного изменения частоты возбуждения реакция конструкции представляет собой наложение переходного процесса на стационарный отклик. Амплитуда переходного процесса ![]() будет затухать по следующей формуле:
будет затухать по следующей формуле:
![]() , (Б.2)
, (Б.2)
где ![]() - начальная амплитуда;
- начальная амплитуда; ![]() - время.
- время.
Можно принять, что начальное значение амплитуды переходного процесса составляет менее 10% амплитуды установившегося отклика. При таком допущении время ![]() , необходимое для затухания переходного процесса до уровня менее 5% соответствующего значения в установившемся состоянии с амплитудой
, необходимое для затухания переходного процесса до уровня менее 5% соответствующего значения в установившемся состоянии с амплитудой ![]() , вычисляют по формуле
, вычисляют по формуле
![]() , (Б.3)
, (Б.3)
в результате чего получают
![]() . (Б.4)
. (Б.4)
Таким образом, перед измерением отклика на каждой из дискретных частот длительность возбуждения должна составлять, по крайней мере, (0,221/![]() ) с. Полное время возбуждения на каждой частоте складывается из значения
) с. Полное время возбуждения на каждой частоте складывается из значения ![]() и времени, необходимого для измерения сигналов силы и отклика конструкции.
и времени, необходимого для измерения сигналов силы и отклика конструкции.
Текст документа сверен по:
официальное издание
М.: ИПК Издательство стандартов, 1996
Личный кабинет:
доступно после авторизации Светлана Бессараб: все социальные обязательства государства будут выполнены
Светлана Бессараб: все социальные обязательства государства будут выполнены  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2024 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке