
- USD ЦБ 03.12 30.8099 -0.0387
- EUR ЦБ 03.12 41.4824 -0.0244
|
Краснодар:
|
погода |
ноября
24
воскресенье,
Курсы
Индексы
- DJIA 03.12 12019.4 -0.01
- NASD 03.12 2626.93 0.03
- RTS 03.12 1545.57 -0.07
I. Общие положения
1. Методические рекомендации по летным проверкам наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации (далее - МР ЛП ГА) разработаны в соответствии с приказом Министерства транспорта Российской Федерации от 18 января 2005 года N 1 "Об утверждении Федеральных авиационных правил "Летные проверки наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации" (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383), стандартами и рекомендациями Международной организации гражданской авиации (ИКАО), принятыми для проведения летных проверок наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов (далее - наземные средства РТОП, связи и системы ССО), а также с учетом опыта эксплуатации наземных средств РТОП, связи и систем ССО в организациях гражданской авиации и опыта эксплуатации воздушных судов-лабораторий (далее - ВСЛ), оборудованных специальной аппаратурой летного контроля.
2. Настоящие Методические рекомендации определяют методику проведения летных проверок наземных средств РТОП, связи и систем ССО и предназначены для инженерно-технического и летного персонала авиационных предприятий-эксплуатантов ВСЛ, диспетчерского состава служб управления воздушным движением (далее - служба УВД), инженерно-технического персонала служб эксплуатации радиотехнического оборудования обеспечения полетов и связи (далее - служба ЭРТОС), инженерно-технического персонала служб эксплуатации светотехнического оборудования обеспечения полетов (далее - служба ЭСТОП) организаций, осуществляющих деятельность в области гражданской авиации.
3. Авиационные работы по летным проверкам параметров и характеристик наземных средств РТОП, связи и систем ССО выполняются экипажами воздушных судов-лабораторий, оборудованных специальной аппаратурой летного контроля (далее - АЛК) и инженерно-техническим персоналом служб ЭРТОС (служб ЭСТОП) с периодичностью и в соответствии с программами летных проверок этих средств и систем, приведенными в Федеральных авиационных правилах "Летные проверки наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов гражданской авиации", утвержденных приказом Министерства транспорта Российской Федерации от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383),
4. Периодические летные проверки параметров и характеристик различных по назначению наземных средств РТОП, связи и систем ССО, расположенных на одном аэродроме, могут проводиться одновременно.
Возможность комплексирования летных проверок различных по назначению наземных средств РТОП, связи и систем ССО определяется бортовым инженером АЛК и инженерно-техническим персоналом служб ЭРТОС и ЭСТОП.
5. При вводе наземных средств РТОП, связи и систем ССО в эксплуатацию время, приведенное в программах летных проверок, может корректироваться в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкции по производству полетов), а также с учетом топографических условий местности, количества воздушных трасс (коридоров) и по другим объективным причинам.
Решение о корректировке времени летной проверки принимает руководитель организации, на эксплуатации которой находятся наземные средства РТОП и связи (системы ССО).
6. После проведения ремонта отдельных блоков, влияющих на изменение основных технических характеристик средств и систем, специальные летные проверки проводятся только в случаях, когда эти работы требуют подтверждения параметров и характеристик, установленных эксплуатационной документацией на данный тип оборудования.
7. При восстановлении работы наземных средств РТОП и связи после исключения их из регламента на срок более шести месяцев специальные летные проверки проводятся в случае истечения срока предыдущей периодической проверки.
8. При оборудовании центра управления воздушным движением аппаратурой отображения радиолокационной информации, не входящей в комплект радиолокационной станции, специальные летные проверки выполняются в соответствии с методикой, приведенной в программе приемо-сдаточных испытаний данного оборудования.
II. Методики летных проверок параметров и характеристик радиомаячных систем инструментального захода воздушных судов на посадку
9. Оборудование радиомаячной системы инструментального захода воздушных судов (далее - ВС) на посадку (далее - РМС инструментального захода ВС на посадку) состоит из наземных и бортовых радиотехнических устройств, обеспечивающих ВС информацией, необходимой для управления ими в процессе захода на посадку и во время посадки.
Бортовое оборудование РМС инструментального захода ВС на посадку состоит из навигационно-посадочной аппаратуры и стрелочных индикаторов положения курса и глиссады с флажковыми сигнализаторами (бленкерами) и предназначено для выдачи в систему управления полетом и на индикаторы положения курса и глиссады экипажа сигналов, пропорциональных угловым отклонениям ВС от номинальной траектории снижения.
Наземное оборудование РМС инструментального захода ВС на посадку состоит из курсового (далее - КРМ) и глиссадного (далее - ГРМ) радиомаяков, которые формируют в пространстве равносигнальные зоны соответственно в горизонтальной (линия курса) и вертикальной (линия глиссады) плоскостях на траектории захода ВС на посадку. Пересечение этих плоскостей определяет номинальную траекторию снижения ВС в направлении оси ВПП с постоянным наклоном к горизонту. Кроме того, в состав РМС инструментального захода ВС на посадку входят маркерные радиомаяки (далее - МРМ), которые сигнализируют экипажу о моменте прохода характерных точек на траектории снижения ВС: дальний МРМ/ОМ, ближний МРМ/ММ, внутренний MPM/IM.
10. При вводе в эксплуатацию и присвоении категории РМС инструментального захода ВС на посадку типа ILS (СП) проверяются первый и второй комплекты аппаратуры КРМ, ГРМ и МРМ. При второй летной проверке (полугодовой) измеряются параметры и характеристики только первых комплектов РМС, вторые комплекты проверяются (при необходимости подстраиваются) по показаниям наземной контрольной аппаратуры. При третьей летной проверке (годовой) измеряются параметры и характеристики вторых комплектов РМС, первые комплекты проверяются (при необходимости подстраиваются) по показаниям наземной контрольной аппаратуры. При проведении последующих периодических летных проверок РМС инструментального захода ВС на посадку, кроме специальных, комплекты аппаратуры радиомаяков проверяются поочередно.
Периодические летные проверки глиссадного радиомаяка РМС инструментального захода ВС на посадку типа СП-75 с антенно-фидерным устройством (далее - АФУ) типа "интерферометр" проводятся для обоих комплектов аппаратуры.
11. Маневрирование ВСЛ при измерении параметров и характеристик РМС инструментального захода ВС на посадку осуществляется по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с точным выдерживанием индикаторов положения курса и глиссады в центре шкалы навигационного прибора - величина крена ВСЛ не более ![]() 5°. Типовые схемы маневрирования ВСЛ при летной проверке РМС инструментального захода ВС на посадку приведены на рисунке 1 приложения N 1, а перечень требований ИКАО к летной проверке РМС инструментального захода ВС на посадку - в приложении N 4.
5°. Типовые схемы маневрирования ВСЛ при летной проверке РМС инструментального захода ВС на посадку приведены на рисунке 1 приложения N 1, а перечень требований ИКАО к летной проверке РМС инструментального захода ВС на посадку - в приложении N 4.
12. Выбор места установки системы траекторных измерений (далее - СТИ) или станции наземных поправок, работающей с использованием информации от спутниковых навигационных систем типа ГЛОНАСС, GPS и т.д. (далее - СНС), осуществляется в соответствии с руководством по эксплуатации (далее - РЭ) на данный тип оборудования.
13. При маневрировании ВСЛ вне зоны измерений возможен обмен информацией между бортовым инженером-оператором АЛК (далее - БО АЛК) и инженерно-техническим персоналом (далее - ИТП) службы ЭРТОС (службы ЭСТОП) о качестве функционирования проверяемого средства (системы ССО), проведении необходимых регулировок оборудования и т.п.
14. В процессе выполнения летной проверки экипаж ВСЛ сообщает БО АЛК следующую информацию:
метеоусловия в районе выполнения летной проверки;
выход ВСЛ в расчетную точку начала режима измерений;
высоты прохода ДПРМ и БПРМ;
точность выхода ВСЛ на ось ВПП;
момент прохода порога ВПП;
характер залегания линии курса (далее - ЛК) и линии глиссады (далее - ЛГ);
другую необходимую для летных измерений информацию.
15. Бортовой инженер-оператор АЛК информирует командира ВСЛ о:
предстоящем режиме маневрирования ВСЛ (заход по "нулю курса"/"нулю глиссады"; заход по полусектору курса: "справа"/"слева"; заход по полусектору глиссады: "выше"/"ниже"; АХ КРМ - "сечение курса"; УХ ГРМ - "сечение глиссады"; зона действия РМС; полет по "орбите", полет по "радиалу" и т.д.);
дальности и высоте, с которых необходимо выполнять измерения;
завершении измерений, высоте ухода на второй круг, рубеже (точке) начала следующего захода и т.д.
16. В процессе проведения летной проверки БО АЛК информирует наземного оператора СТИ и ИТП проверяемого радиомаяка о предстоящем заходе с обязательной информацией наземного оператора СТИ о выполнении ВСЛ четвертого разворота, кроме того БО АЛК все свои действия и результаты экспресс-анализа регистрирует в бортовом журнале. Записи выполняются точными, разборчивыми и пригодными для независимого анализа.
17. Траектория полета ВСЛ при измерении параметров и характеристик РМС инструментального захода ВС на посадку приведена на рисунке 2 приложения N 1, участки измерений параметров и характеристик РМС инструментального захода ВС на посадку - в таблице 1 приложения N 1, а форма отчета о летной проверке РМС инструментального захода ВС на посадку - в приложении N 6.
18. Типовая схема зоны действия наземного радиотехнического устройства, излучающего в пространство радиосигналы, содержащие информацию для управления ВС в горизонтальной плоскости при выполнении ими захода на посадку (далее - курсовой радиомаяк PMC/ILS), приведена на рисунке 3 приложения N 1.
19. Проверка зависимости информационного параметра курсового сигнала (РГМ) от угла относительно линии курса, соответствующего этому параметру (далее - азимутальная характеристика КРМ (АХ КРМ) - клиренс при смещении от линии курса), выполняется для определения того, что излучаемый сигнал КРМ обеспечивает экипаж правильной информацией о смещении ВС относительно линии курса и что отсутствуют геометрические места точек в любой горизонтальной плоскости, в которых РГМ равна нулю, и отличающиеся от геометрического места точек, образующего линию курса (далее - ложные курсы).
АХ КРМ (клиренс) проверяется только в угловых пределах зоны действия радиомаяка, обеспечивающей с каждой стороны посадочного курса угол, равный ![]() 35°, за исключением случаев, когда для захода на посадку используется обратный курс. В этих случаях клиренс также проверяется в угловых пределах зоны действия обратного курса. В целях проверки наличия ложных курсов вне зоны действия радиомаяка рекомендуется при вводе КРМ в эксплуатацию проводить полет по круговой траектории с постоянной абсолютной высотой и с постоянным расстоянием от АФУ КРМ (далее - орбитальный полет). Ложные курсы могут быть обусловлены характеристиками диаграммы направленности АФУ КРМ или условиями окружающего рельефа местности. По этой причине рекомендуется проводить анализ АХ КРМ при больших углах места в следующих случаях:
35°, за исключением случаев, когда для захода на посадку используется обратный курс. В этих случаях клиренс также проверяется в угловых пределах зоны действия обратного курса. В целях проверки наличия ложных курсов вне зоны действия радиомаяка рекомендуется при вводе КРМ в эксплуатацию проводить полет по круговой траектории с постоянной абсолютной высотой и с постоянным расстоянием от АФУ КРМ (далее - орбитальный полет). Ложные курсы могут быть обусловлены характеристиками диаграммы направленности АФУ КРМ или условиями окружающего рельефа местности. По этой причине рекомендуется проводить анализ АХ КРМ при больших углах места в следующих случаях:
первоначальный ввод в эксплуатацию при сложном рельефе местности;
изменения места установки АФУ КРМ;
установка АФУ КРМ другого типа.
Проверка АХ КРМ при больших углах места осуществляется в угловых пределах обеспечиваемой зоны действия таким же способом, что и проверка клиренса при смещении от линии курса, на высоте, соответствующей углу места, равному 7° относительно горизонтали, проходящей через АФУ КРМ. Если минимальный клиренс на этой относительной высоте при орбитальном полете с радиусом 7-15 км (4-8 м. миль) превышает 290 мкА, а АХ КРМ на высоте 300 м (1000 фут) является удовлетворительной, то считается, что КРМ отвечает эксплуатационным требованиям на всех промежуточных высотах в пределах зоны действия.
Если условия рельефа местности требуют, чтобы высота захода на посадку превышала 1800 м (6000 фут) относительно АФУ КРМ, то летную проверку выполняют на больших высотах для подтверждения отсутствия ложных курсов, оказывающих существенное влияние на выполнение полета рейсовых ВС.
В зависимости от технических характеристик аппаратуры летного контроля возможны следующие варианты маневрирования ВСЛ при определении АХ КРМ:
а) автоматическая АЛК.
Измерения АХ КРМ (клиренса) выполняются при маневрировании ВСЛ по орбите радиусом 7-15 км (4-8 м. миль) от места установки АФУ КРМ и на высоте 300-460 м (1000-1500 фут), но не ниже безопасной. В случае влияния рельефа местности высота полета выбирается такой, при которой обеспечивается линия прямой видимости между ВСЛ и АФУ КРМ.
АЛК работает в режиме определения АХ КРМ в соответствии с РЭ АЛК.
Измерения проводятся:
с использованием аппаратуры СНС при нахождении ВСЛ на орбите 360° в произвольной точке, радиусом 7-15 км (5-8 м. миль) от места установки АФУ КРМ и на высоте 300-460 м (1000-1500 фут), но не ниже безопасной;
с использованием СТИ в момент прохода ВСЛ угла, равного ![]() 35° (для КРМ с зоной действия, равной сектору
35° (для КРМ с зоной действия, равной сектору ![]() 10°, - пересечению угла, равного
10°, - пересечению угла, равного ![]() 15°) с вершиной в центре АФУ КРМ.
15°) с вершиной в центре АФУ КРМ.
СТИ работает в режиме слежения "грубо" по азимуту (каналу курса).
Измерения завершаются:
с использованием аппаратуры СНС в точке начала измерений при орбитальном полете (360°);
с использованием СТИ в момент прохода ВСЛ точки, симметричной началу измерений относительно продолжения осевой линии ВПП.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра (далее - ИП) КРМ (PГMi, Mi) и угла отклонения ВСЛ от осевой линии ВПП (![]() i), по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (PГMi, Mi) и
i), по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (PГMi, Mi) и ![]() i осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа;
i осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа;
б) полуавтоматическая АЛК.
Измерения АХ КРМ (клиренса) выполняются при маневрировании ВСЛ по линии пути, проходящей под углами, равными ![]() 90° относительно курсовой линии (посадочного курса) точно над ДПРМ или другой выбранной характерной точкой ("сечение курса") на высоте 300-460 м (1000-1500 фут), но не ниже безопасной с постоянной скоростью полета. Заходы ВСЛ выполняются справа налево и слева направо между точками, находящимися на расстоянии
90° относительно курсовой линии (посадочного курса) точно над ДПРМ или другой выбранной характерной точкой ("сечение курса") на высоте 300-460 м (1000-1500 фут), но не ниже безопасной с постоянной скоростью полета. Заходы ВСЛ выполняются справа налево и слева направо между точками, находящимися на расстоянии ![]() 10-12 км в стороне от оси ВПП для КРМ с зоной действия, ограниченной сектором
10-12 км в стороне от оси ВПП для КРМ с зоной действия, ограниченной сектором ![]() 35°, и
35°, и ![]() 8-10 км для КРМ с зоной действия, ограниченной сектором
8-10 км для КРМ с зоной действия, ограниченной сектором ![]() 10° относительно осевой линии ВПП с вершиной в точке размещения фазового центра АФУ КРМ.
10° относительно осевой линии ВПП с вершиной в точке размещения фазового центра АФУ КРМ.
Схема маневрирования ВСЛ при измерении АХ КРМ (клиренса) приведена на рисунке 4 приложения N 1.
АЛК работает в режиме определения АХ КРМ в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "грубо" по азимуту (каналу курса).
Измерения проводятся при выходе ВСЛ в точку, соответствующую пересечению угла, равного ![]() 35,0° (для КРМ с зоной действия, равной сектору
35,0° (для КРМ с зоной действия, равной сектору ![]() 10°, - пересечению угла, равного
10°, - пересечению угла, равного ![]() 15°) с вершиной в центре АФУ КРМ.
15°) с вершиной в центре АФУ КРМ.
Измерения завершаются в момент прохода ВСЛ точки, симметричной началу измерений относительно продолжения осевой линии ВПП.
В процессе маневрирования ВСЛ измеряются текущие значения ИП КРМ (PГMi, Mi) и угла отклонения ВСЛ от осевой линии ВПП (![]() i), по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (PГMi, Mi) и
i), по которым проводятся экспресс-анализ и оценка АХ КРМ (клиренса) в соответствии с РЭ АЛК. Запись контролируемых ИП КРМ (PГMi, Mi) и ![]() i осуществляется в устройстве регистрации и в бортовом журнале инженера АЛК.
i осуществляется в устройстве регистрации и в бортовом журнале инженера АЛК.
Информационный параметр КРМ (PГMi, Mi) монотонно возрастает при угловом отклонении ВСЛ (![]() i) в горизонтальной плоскости от линии курса, где ИП равен нулю, до углов с РГМ, равных
i) в горизонтальной плоскости от линии курса, где ИП равен нулю, до углов с РГМ, равных ![]() 0,18 (М, равных
0,18 (М, равных ![]() 20,5%), где ИП монотонно увеличивается, и от углов с РГМ, равных
20,5%), где ИП монотонно увеличивается, и от углов с РГМ, равных ![]() 0,18 (М, равных
0,18 (М, равных ![]() 20,5%), до углов
20,5%), до углов ![]() 10° информационный параметр не может быть менее РГМ, равных
10° информационный параметр не может быть менее РГМ, равных ![]() 0,18 (М, равных
0,18 (М, равных ![]() 20,5%), и от углов
20,5%), и от углов ![]() 10° до углов
10° до углов ![]() 35° значение ИП на выходе курсового приемника не может быть менее РГМ, равных
35° значение ИП на выходе курсового приемника не может быть менее РГМ, равных ![]() 0,155 (М, равных
0,155 (М, равных ![]() 17,5%), не допускается уменьшение ИП до нуля и изменение его знака.
17,5%), не допускается уменьшение ИП до нуля и изменение его знака.
Для курсового радиомаяка PMC/ILS с зоной действия, равной 360°, значение информационного параметра (PГMi) за пределами сектора, равного ![]() 35°, не может быть менее 0,155.
35°, не может быть менее 0,155.
При ограничении зоны действия КРМ из-за рельефа местности или по другим объективным причинам схема маневрирования ВСЛ при измерении АХ КРМ определяется командиром ВСЛ, БО АЛК и ИТП служб УВД и ЭРТОС организации, на эксплуатации которой находятся наземные средства РТОП и связи, с учетом аэронавигационного паспорта аэродрома/аэроузла (инструкции по производству полетов).
В процессе измерения азимутальной характеристики КРМ контролируется кодированный сигнал опознавания, который передается курсовым радиомаяком. Опознавание считается удовлетворительным, если кодовые знаки правильны, четко различимы и передаются с надлежащими интервалами.
20. Проверка определенного сектора воздушного пространства в горизонтальной плоскости, в пределах которого сигнал курсового радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия КРМ в горизонтальной плоскости - дальность действия) выполняется для подтверждения того, что КРМ обеспечивает пользователя правильной информацией в пределах всей зоны эксплуатационного применения радиомаяка.
Зона действия курсового радиомаяка PMC/ILS в горизонтальной плоскости охватывает сектор от фазового центра его АФУ до следующих расстояний:
46,3 км (25 м. миль) в пределах сектора ![]() 10° относительно линии курса;
10° относительно линии курса;
31,5 км (17 м. миль) в секторе между 10° и 35° относительно линии курса;
18,5 км (10 м. миль) за пределами сектора ![]() 35°, если обеспечивается такая зона действия.
35°, если обеспечивается такая зона действия.
В тех случаях, когда этого требуют топографические условия или это допускается эксплуатационными требованиями, указанные пределы могут быть уменьшены до 33,4 км (18 м. миль) в пределах сектора ![]() 10° и 18,5 км (10 м. миль) в пределах остальной части зоны действия при условии, что другие радионавигационные средства обеспечивают удовлетворительную зону действия в пределах промежуточного участка захода на посадку.
10° и 18,5 км (10 м. миль) в пределах остальной части зоны действия при условии, что другие радионавигационные средства обеспечивают удовлетворительную зону действия в пределах промежуточного участка захода на посадку.
Сигналы курсового радиомаяка принимаются на указанных расстояниях на высоте 600 м (2000 фут) и более относительно высоты порога ВПП или 300 м (1000 фут) относительно наивысшей точки препятствия в пределах промежуточного и конечного участков захода на посадку в зависимости от того, какая из величин больше.
В процессе проведения периодических летных проверок допускается проверять зону действия курсового радиомаяка PMC/ILS только на расстоянии 31,5 км (17 м. миль) в пределах сектора, равного ![]() 35° с каждой стороны от линии курса, за исключением случаев, когда сигналы КРМ используются вне пределов этого сектора.
35° с каждой стороны от линии курса, за исключением случаев, когда сигналы КРМ используются вне пределов этого сектора.
Характеристики зоны действия КРМ в горизонтальной плоскости приведены на рисунке 5 приложения N 1.
Зона действия курсового радиомаяка PMC/ILS в горизонтальной плоскости (ЗДкг) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме в соответствии со схемой, приведенной на рисунке 6 приложения N 1.
АЛК работает в режиме определения зоны действия КРМ в горизонтальной плоскости в соответствии с РЭ АЛК.
Измерения ЗДкг выполняются с удалений ВСЛ от АФУ КРМ:
50 км с курсом посадки, последующим снижением по глиссаде и завершаются в:
точке "В" - для РМС, КРМ - I категории;
точке "Т" - для PMC, КPM - II категории;
точке "Е" с посадкой и пробегом по ВПП - для PMC, КPM - III категории;
50 км с курсами, отличными от посадочного на ![]() 10°, без снижения и завершаются в:
10°, без снижения и завершаются в:
точке, соответствующей проходу ВСЛ угла места, равного 7° для РМС, КPM -I, II и III категорий;
35 км с курсами, отличными от посадочного на ![]() 35°, без снижения и завершаются в:
35°, без снижения и завершаются в:
точке, соответствующей удалению ВСЛ 15 км от порога ВПП, или в точке, соответствующей проходу ВСЛ угла места, равного 7° для РМС, КРМ - I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения напряженности электромагнитного поля радиомаяка (Екi) и дальности ВСЛ от АФУ КРМ (Дi) в соответствии с РЭ АЛК, по которым выполняются анализ и оценка зоны действия КРМ в горизонтальной плоскости (ЗДкг - дальность действия КРМ). Запись контролируемых Екi и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
Напряженность электромагнитного поля КРМ (Ек) составляет:
на границах зоны действия КРМ - 40 мкВ/м;
на глиссаде снижения в пределах сектора курса и удалении 18,5 км (10 м. миль) от АФУ КРМ - 90 мкВ/м для РМС, КРМ - I, II категорий и 100 мкВ/м для РМС, КРМ - III категории;
в опорной точке "T"/RDH - не менее 200 мкВ/м для РМС, КРМ - II и III категорий;
от опорной точки "T"/RDH до точек "Д" и "Е" - не менее 100 мкВ/м.
21. Проверка определенного сектора воздушного пространства в вертикальной плоскости, в пределах которого сигнал курсового радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия КРМ в вертикальной плоскости) выполняется одновременно с полетами по проверке зоны действия курсового радиомаяка в горизонтальной плоскости.
Зона действия курсового радиомаяка PMC/ILS в вертикальной плоскости (ЗДкв) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме на высоте круга без снижения с удаления 50 км от АФУ КРМ до удаления, соответствующего проходу ВСЛ угла места, равного 7° с вершиной в центре АФУ КРМ.
АЛК работает в режиме определения зоны действия КРМ в вертикальной плоскости в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "грубо" по углу места (каналу глиссады) или от бортовой СНС.
Измерения зоны действия КРМ в вертикальной плоскости выполняются с удалений ВСЛ от АФУ КРМ, равных 50 км с курсом посадки и курсами, отличными от посадочного на ![]() 10° (для курсов, отличных от посадочного на
10° (для курсов, отличных от посадочного на ![]() 35° - с 35 км), и завершаются через 5 секунд после прохода ВСЛ угла места, равного 7°.
35° - с 35 км), и завершаются через 5 секунд после прохода ВСЛ угла места, равного 7°.
В момент прохода ВСЛ точки, соответствующей углу, равному 7°, в вертикальной плоскости регистрируется значение напряженности электромагнитного поля радиомаяка (Ек).
При невозможности установки аппаратуры СТИ в центре АФУ КРМ граничное значение угла в вертикальной плоскости, соответствующее углу, равному 7°, с учетом высоты полета ВСЛ рассчитывается по формуле:
![]() , где
, где
![]() - граничное значение угла в вертикальной плоскости, соответствующее углу, равному 7°, градус;
- граничное значение угла в вертикальной плоскости, соответствующее углу, равному 7°, градус;
Н - высота полета ВСЛ, м;
h - высота центра оптического устройства СТИ относительно центра АФУ КРМ, м;
![]() - расстояние от проекции центра АФУ КРМ до проекции на поверхность земли точки установки СТИ, м.
- расстояние от проекции центра АФУ КРМ до проекции на поверхность земли точки установки СТИ, м.
По измеренным значениям напряженности электромагнитного поля радиомаяка (Ек) в момент прохода ВСЛ точки с углом места, равным 7°, в соответствии с РЭ АЛК выполняются анализ и оценка зоны действия курсового радиомаяка в вертикальной плоскости (ЗДкв). Запись контролируемых Ек и ![]() осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
Характеристики зоны действия курсового радиомаяка PMC/ILS в вертикальной плоскости (ЗДкв) приведены на рисунке 7 приложения N 1.
В процессе выполнения заходов ВСЛ по проверке зоны действия КРМ в вертикальной плоскости контролируется кодированный сигнал опознавания, который передается курсовым радиомаяком. Опознавание считается удовлетворительным, если кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
22. Геометрическое место точек зоны действия КРМ, ближайших к осевой линии ВПП в горизонтальной плоскости, в которых информационный параметр курсового сигнала (РГМ, М) равен нулю (далее - положение линии курса относительно осевой линии ВПП - точность юстировки курса - Lo) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с последующим снижением по глиссаде и с дальнейшим уходом на второй круг для КРМ - I и II категорий, с посадкой и пробегом по ВПП для КРМ - III категории.
Схема маневрирования ВСЛ при проверке положения средней линии курса относительно оси ВПП для КРМ - I, II и III категорий приведена на рисунке 8 приложения N 1.
Проверка положения линии курса относительно оси ВПП (проверка точности юстировки линии курса) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений, которая поступает в бортовой вычислитель от наземной СТИ или от СНС (ГЛОНАСС/GPS). При этой проверке одновременно определяется смещение линии курса относительно среднего положения такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений курсовой линии - ![]() - структура курса).
- структура курса).
АЛК работает в режиме определения положения средней линии курса и амплитуды искривлений курсовой линии в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по азимуту (каналу курса) или от бортовой СНС с наземной спутниковой станцией поправок.
Проверка положения средней линии курса (L) относительно осевой линии ВПП выполняется на траектории снижения ВСЛ:
от точки "А" до точки "В" - для PMC, КPM - I категории;
от точки "В" до точки "Т" - для PMC, КPM - II категории;
от точки "С" до точки "D" - для PMC, КPM - III категории.
Измерения амплитуды искривлений линии курса (![]() ) проводятся при наличии устойчивой информации о траектории полета ВСЛ (СТИ/СНС) на участке от границы зоны действия курсового радиомаяка (не менее 12-15 км от АФУ КРМ) до:
) проводятся при наличии устойчивой информации о траектории полета ВСЛ (СТИ/СНС) на участке от границы зоны действия курсового радиомаяка (не менее 12-15 км от АФУ КРМ) до:
точки "С" - для РМС, КРМ - I категории;
точки "Т" - для РМС, КРМ - II категории;
точки "Е" - для РМС, КРМ - III категории.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра КРМ (PГMi, Mi), угла отклонения ВСЛ от осевой линии ВПП (![]() i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (L) относительно оси ВПП и величина амплитуды искривлений курсовой линии (
i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (L) относительно оси ВПП и величина амплитуды искривлений курсовой линии (![]() ). Запись контролируемых ИП КРМ (PГMi, Mi),
). Запись контролируемых ИП КРМ (PГMi, Mi), ![]() i и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
i и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
По полученным результатам вычисляются и документируются:
точность юстировки линии курса (L);
амплитуды искривлений линии курса (![]() - структура курса).
- структура курса).
Линейное отклонение линии курса от оси ВПП (![]() ) в опорной точке РМС ("T"/RDH) определяется по формуле:
) в опорной точке РМС ("T"/RDH) определяется по формуле:
![]() где
где
![]() - линейное отклонение линии курса от оси ВПП у ее порога, м;
- линейное отклонение линии курса от оси ВПП у ее порога, м;
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м;
![]() - среднее угловое отклонение линии курса от оси ВПП, градус.
- среднее угловое отклонение линии курса от оси ВПП, градус.
Расстояние между осью ВПП и средней линией курса (L), измеренное у начала ВПП со стороны захода на посадку (![]() ) в опорной точке РМС ("T"/RDH) составляет не более:
) в опорной точке РМС ("T"/RDH) составляет не более:
![]() 10,5 м (
10,5 м (![]() 35,0 фут) - для РМС, КРМ - I категории;
35,0 фут) - для РМС, КРМ - I категории;
![]() 7,5 м (
7,5 м (![]() 25,0 фут) - для PMC, КPM - II категории;
25,0 фут) - для PMC, КPM - II категории;
![]() 3,0 м (
3,0 м (![]() 10,0 фут) - для PMC, КPM - III категории.
10,0 фут) - для PMC, КPM - III категории.
Допуски на величину амплитуды искривлений линии курса (![]() ) РМС типа ILS, СП составляют не более:
) РМС типа ILS, СП составляют не более:
от границы зоны действия радиомаяка до точки "А" ![]() 0,031 РГМ,
0,031 РГМ, ![]() 3,5% М (
3,5% М (![]() 50,0 мкА) - для КРМ - I, II и III категорий;
50,0 мкА) - для КРМ - I, II и III категорий;
от точки "А" до точки "В" линейное уменьшение до ![]() 0,015 РГМ,
0,015 РГМ, ![]() 1,7% М (
1,7% М (![]() 25,0 мкА) - для КРМ - I категории и до
25,0 мкА) - для КРМ - I категории и до ![]() 0,005 РГМ (
0,005 РГМ (![]() 8,0 мкА) - для КРМ - II и III категорий;
8,0 мкА) - для КРМ - II и III категорий;
от точки "В" до точки "С" ![]() 0,015 РГМ,
0,015 РГМ, ![]() 1,7% М (
1,7% М (![]() 25,0 мкА) - для КРМ - I категории;
25,0 мкА) - для КРМ - I категории;
от точки "В" до опорной точки "T"/RDH ![]() 0,005 РГМ (
0,005 РГМ (![]() 8,0 мкА) - для КРМ - II категории;
8,0 мкА) - для КРМ - II категории;
от точки "В" до точки "Д" ![]() 0,005 РГМ (
0,005 РГМ (![]() 8,0 мкА) и затем линейное увеличение до
8,0 мкА) и затем линейное увеличение до ![]() 0,01 РГМ (
0,01 РГМ (![]() 16,0 мкА) в точке "Е" - для КРМ - III категории.
16,0 мкА) в точке "Е" - для КРМ - III категории.
23. Проверка отношения измеренной РГМ (М) к соответствующему боковому смещению относительно соответствующей опорной линии (далее -чувствительность к смещению от линии курса) осуществляется при маневрировании ВСЛ с имитацией посадки по границам полусектора курса или с выполнением орбитальных полетов ВСЛ с пересечением сектора курса под прямым углом к продолжению осевой линии ВПП.
Полусектор КРМ в горизонтальной плоскости, содержащий линию курса и ограниченный геометрическими местами точек, ближайших к линии курса, в которых РГМ равна 0,0775 (далее - полусектор курса) при использовании метода с имитацией захода на посадку, определяется при маневрировании ВСЛ по обе стороны от линии курса со снижением по глиссаде и дальнейшим уходом на второй круг в точке "В" для КРМ -I, II и III категорий.
Номинальный полусектор курса (![]() ) определяется по формулам:
) определяется по формулам:
![]() мин. или
мин. или ![]() град., где
град., где
0,00775 - номинальная величина РГМ на границе полусектора курса;
3438 - коэффициент перевода тангенса угла полусектора курса;
0,00145 - номинальная чувствительность к смещению от линии курса;
Iо - номинальная ширина полусектора курса у порога ВПП со стороны захода на посадку, равная 105 м;
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м.
Ширина полусектора курса определяется как сумма правой (![]() п) и левой (
п) и левой (![]() л) частей полусектора и составляет величину не более 3,0°.
л) частей полусектора и составляет величину не более 3,0°.
Размеры правой (![]() п) и левой (
п) и левой (![]() л) частей полусектора курса по возможности устанавливаются как можно симметричнее.
л) частей полусектора курса по возможности устанавливаются как можно симметричнее.
Схема маневрирования ВСЛ при измерении чувствительности к смещению от линии курса приведена на рисунке 9 приложения N 1.
АЛК работает в режиме определения чувствительности к смещению от линии курса в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по азимуту (каналу курса) или от бортовой СНС.
Для удобства пилотирования ВСЛ по границе курсового полусектора с выдерживанием стрелки курса в центре шкалы индикаторного навигационного прибора, подобно пилотированию ВСЛ по курсовой линии, ток в цепи индикатора курса компенсируется током обратной полярности от АЛК.
Проверка чувствительности к смещению от линии курса (Sк) выполняется после выхода ВСЛ из четвертого разворота на правую (левую) границу полусектора курса от точки "А" до точки "В" для КРМ - I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра КРМ на границах полусектора (РГМ пск п(л)i, М пcк п(л)i), угла отклонения ВСЛ от границы правой/левой части полусектора курса (![]() п (л)i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики КРМ. Запись контролируемых ИП,
п (л)i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка крутизны характеристики КРМ. Запись контролируемых ИП, ![]() пi,
пi, ![]() лi и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
лi и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
По полученным результатам вычисляются и документируются:
величина правой (левой) части полусектора курса ![]() п (
п (![]() л) у порога ВПП, значение чувствительности к смещению от линии курса (Sк) и ее отклонение (
л) у порога ВПП, значение чувствительности к смещению от линии курса (Sк) и ее отклонение (![]() Sк) от номинального значения по формулам:
Sк) от номинального значения по формулам:
![]() , где
, где
![]()
Sк - чувствительности к смещению от линии курса, РГМ/м;
коэффициент В = 532,9 (PMC/ILS), В = 60150 (РМС/СП);
D - расстояние от КРМ до порога ВПП со стороны захода на посадку, м;
![]() п (
п (![]() л) - величина правой (левой) части полусектора курса, м;
л) - величина правой (левой) части полусектора курса, м;
![]() - отклонение чувствительности от номинального значения, %;
- отклонение чувствительности от номинального значения, %;
Sкф и Sкн - фактическая и номинальная чувствительности к смещению от линии курса, РГМ/м.
Изменения информационного параметра (РГМ пск п(л)i) и чувствительность к смещению от линии курса - крутизна характеристики КРМ приведены на рисунке 10 приложения N 1.
Отклонение информационного параметра КРМ (![]() ), который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВС от линии курса (крутизна характеристики выходного сигнала канала курса) от установленного при вводе в эксплуатацию (номинального) значения справа (слева) от линии курса составляет, не более:
), который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВС от линии курса (крутизна характеристики выходного сигнала канала курса) от установленного при вводе в эксплуатацию (номинального) значения справа (слева) от линии курса составляет, не более:
17,0% - для PMC/ILS, КРМ - I и II категорий;
10,0% - для PMC/ILS, КРМ - III категории.
Различия между результатами наземных и летных измерений чувствительности к смещению от линии курса составляют не более 10% от установленного номинального значения чувствительности, если указанная степень корреляции не достигается, необходимо выяснить причину расхождения и отрегулировать крутизну характеристики радиомаяка заново.
24. Проверка влияния широкого канала КРМ на положение средней линии курса проводится для курсовой системы, зона действия которой создается путем использования двух независимых диаграмм излучения, образуемых разнесенными несущими частотами в пределах определенного канала курсового радиомаяка (далее - двухчастотный КРМ) только при вводе РМС в эксплуатацию.
Проверка влияния широкого канала на положение средней линии курса осуществляется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме со снижением по глиссаде и с дальнейшим уходом на второй круг для РМС, КРМ - I и II категорий, с посадкой и пробегом по ВПП для РМС, КРМ - III категории.
На КРМ отключается сигнал широкого канала в соответствии с руководством по эксплуатации данного типа РМС.
АЛК работает в режиме определения положения средней линии курса в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по азимуту (каналу курса) или от бортовой СНС.
Проверка параметров и характеристик КРМ при отключенном широком канале проводится в соответствии с методикой, приведенной в пункте 22.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра КРМ (РГМi, Mi), угла отклонения ВСЛ от осевой линии ВПП (![]() i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (L) относительно оси ВПП и величина амплитуды искривлений курсовой линии (
i) и дальности от АФУ радиомаяка (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии курса (L) относительно оси ВПП и величина амплитуды искривлений курсовой линии (![]() ) при отключенном широком канале курсового радиомаяка.
) при отключенном широком канале курсового радиомаяка.
По полученным результатам вычисляется и документируется точность юстировки линии курса (![]() оу) при отключенном широком канале, которая сравнивается с угловым положением линии курса, измеренным при выполнении заходов ВСЛ по линии курса при нормальном функционировании радиомаяка (
оу) при отключенном широком канале, которая сравнивается с угловым положением линии курса, измеренным при выполнении заходов ВСЛ по линии курса при нормальном функционировании радиомаяка (![]() о) в соответствии с методикой, приведенной в пункте 22, по формуле:
о) в соответствии с методикой, приведенной в пункте 22, по формуле:
![]() , где
, где
![]()
![]() - разность положений средней линии курса относительно оси ВПП при нормальном функционировании КРМ и отключенном широком канале радиомаяка, мин;
- разность положений средней линии курса относительно оси ВПП при нормальном функционировании КРМ и отключенном широком канале радиомаяка, мин;
![]() - угловое положение линии курса, измеренное при выполнении заходов ВСЛ по линии курса при нормальном функционировании радиомаяка, мин;
- угловое положение линии курса, измеренное при выполнении заходов ВСЛ по линии курса при нормальном функционировании радиомаяка, мин;
![]() - угловое положение линии курса, измеренное при выполнении заходов ВСЛ по линии курса при отключенном широком канале радиомаяка, мин.
- угловое положение линии курса, измеренное при выполнении заходов ВСЛ по линии курса при отключенном широком канале радиомаяка, мин.
Разность положений средней линии курса относительно оси ВПП при нормальном функционировании КРМ и отключенном широком канале радиомаяка (![]() ) составляет не более
) составляет не более ![]() 12'(
12'(![]() 0,2°). Если эта разность превышает границы допуска, то радиомаяк настраивается заново.
0,2°). Если эта разность превышает границы допуска, то радиомаяк настраивается заново.
25. Проверка отклонения линии курса в результате наличия нежелательных вертикально-поляризованных составляющих сигналов радиомаяка на качество пилотирования ВС (далее - влияние вертикальной составляющей поляризации поля КРМ - ВСП) выполняется при вводе КРМ в эксплуатацию и зависит от технических характеристик АЛК:
а) при наличии в комплекте АЛК устройства, позволяющего устанавливать углы наклона плоскости поляризации курсо-навигационной антенны (КНА), для оценки влияния вертикальной составляющей поляризации поля осуществляется маневрирование ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме по линии курса, последующим снижением по глиссаде и уходом на второй круг, при этом углы крена ВСЛ не превышают ![]() 5°.
5°.
АЛК работает в режиме определения ВСП в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по азимуту (каналу курса) или от бортовой СНС.
Измерения проводятся с удалений ВСЛ от АФУ КРМ 20-25 км с курсом посадки и завершаются в точке "В" - для РМС, КРМ - I, II и III категорий.
Один комплект курсо-навигационного приемника АЛК подключается на выход антенны с нормальной плоскостью поляризации, второй комплект работает от антенны с наклоном плоскости поляризации, равной ![]() 45° (
45° (![]()
![]() - величина углов наклона плоскости поляризации КНА приведена в протоколе калибровки АЛК). Выполняются два захода ВСЛ: один при наклоне плоскости поляризации КНА, равной +45° (+
- величина углов наклона плоскости поляризации КНА приведена в протоколе калибровки АЛК). Выполняются два захода ВСЛ: один при наклоне плоскости поляризации КНА, равной +45° (+![]() ), второй при -45° (-
), второй при -45° (-![]() ). В процессе маневрирования ВСЛ измеряются текущие значения выходных токов: первого приемника с нормально расположенной антенной (Ii-1) и второго приемника (Ii+2 и Ii-2) с плоскостью поляризации антенны
). В процессе маневрирования ВСЛ измеряются текущие значения выходных токов: первого приемника с нормально расположенной антенной (Ii-1) и второго приемника (Ii+2 и Ii-2) с плоскостью поляризации антенны ![]() 45° (
45° (![]()
![]() ), пропорциональные влиянию вертикальной составляющей поляризации поля КРМ. Запись контролируемых Ii-1, Ii+2 и Ii-2 осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
), пропорциональные влиянию вертикальной составляющей поляризации поля КРМ. Запись контролируемых Ii-1, Ii+2 и Ii-2 осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
Экспресс-анализ ВСП КРМ выполняется следующим образом:
в момент, когда значения тока первого курсового приемника (Ii-1) равняются "0", измеряется текущее значение тока второго приемника (Ii+2 и Ii-2) при его работе на антенну с наклоном плоскости поляризации +45° (+![]() ) и -45° (-
) и -45° (-![]() ). Далее вычисляется среднеарифметическое значение токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации: +45° (+
). Далее вычисляется среднеарифметическое значение токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации: +45° (+![]() ) и -45° (-
) и -45° (-![]() ) и определяется разность значений этих токов по формуле:
) и определяется разность значений этих токов по формуле:
![]()
![]() l - разность значений токов при работе навигационного приемника на антенну с наклоном плоскости поляризации (+
l - разность значений токов при работе навигационного приемника на антенну с наклоном плоскости поляризации (+![]() и -
и -![]() ), мкА;
), мкА;
Icp (+![]() ) и Icp (-
) и Icp (-![]() ) - среднеарифметические значения токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации (+
) - среднеарифметические значения токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации (+![]() и -
и -![]() ), мкА.
), мкА.
Величина тока, обусловленная наличием ВСП КРМ, приведенная к крену ВСЛ, равному ![]() 20°, и бортовой антенне с подавлением уровня ВСП, равным 10 дБ (17,5°), вычисляется по формуле:
20°, и бортовой антенне с подавлением уровня ВСП, равным 10 дБ (17,5°), вычисляется по формуле:
![]()
![]() - величина тока ВСП, приведенная к крену ВС, равному
- величина тока ВСП, приведенная к крену ВС, равному ![]() 20° и бортовой антенне с подавлением уровня ВСП, равным 10 дБ (17,5°), мкА;
20° и бортовой антенне с подавлением уровня ВСП, равным 10 дБ (17,5°), мкА;
+![]() и -
и -![]() - углы наклона плоскости поляризации вправо и влево бортовой измерительной антенны ВСЛ (из протокола калибровки АЛК), град;
- углы наклона плоскости поляризации вправо и влево бортовой измерительной антенны ВСЛ (из протокола калибровки АЛК), град;
![]() - разность значений токов бортового навигационного приемника, измеренных при наклонах плоскости поляризации антенны на угол
- разность значений токов бортового навигационного приемника, измеренных при наклонах плоскости поляризации антенны на угол ![]()
![]() , мкА;
, мкА;
коэффициент 0,452 = tg (20° +17,5°) - tg 17,5°.
По результатам измерений в соответствии с РЭ АЛК и исходя из ее технических характеристик вычисляется величина информационного параметра (РГМ, М, ток в цепи индикатора курса бортового приемника), вызванная наличием вертикально-поляризованного излучения КРМ на линии курса, которая составляет не более:
![]() 0,016 РГМ,
0,016 РГМ, ![]() 1,7% М (
1,7% М (![]() 25,0 мкА) - для КPM/ILS(CП) - I категории;
25,0 мкА) - для КPM/ILS(CП) - I категории;
![]() 0,008 РГМ,
0,008 РГМ, ![]() 0,85% М (
0,85% М (![]() 13,0 мкА) - для КPM/ILS(CП) - II категории;
13,0 мкА) - для КPM/ILS(CП) - II категории;
![]() 0,005 РГМ (
0,005 РГМ (![]() 8,0 мкА) в пределах сектора, ограниченного величиной
8,0 мкА) в пределах сектора, ограниченного величиной ![]() 0,02 РГМ с каждой стороны от линии курса, - для КPM/ILS - III категории.
0,02 РГМ с каждой стороны от линии курса, - для КPM/ILS - III категории.
Влияние вертикально-поляризованных составляющих излучения КРМ является приемлемым, когда оно находится в пределах указанных допусков.
Точность измерений вертикально-поляризованных составляющих излучения КРМ зависит от поляризационных характеристик бортовой курсо-навигационной антенны ВСЛ, поэтому при оценке влияния ВСП на качество пилотирования ВС необходимо учитывать чувствительность бортовой антенны к вертикальной составляющей поляризации;
б) при отсутствии в комплекте АЛК устройства, позволяющего устанавливать углы наклона плоскости поляризации КНА, для оценки влияния вертикальной составляющей поляризации поля КРМ осуществляется маневрирование ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме по линии курса на высоте 300 м, но не менее безопасной, без снижения с периодическими кренами ВСЛ на ![]() 20° вправо и влево относительно продольной оси ВС. Причем ввод ВСЛ в крен
20° вправо и влево относительно продольной оси ВС. Причем ввод ВСЛ в крен ![]() 20° и возврат его в исходное положение нулевого крена выполняется за время не более 5 секунд. В процессе указанных эволюций ВСЛ при отсутствии крена и при кренах
20° и возврат его в исходное положение нулевого крена выполняется за время не более 5 секунд. В процессе указанных эволюций ВСЛ при отсутствии крена и при кренах ![]() 20° удерживается на продолжении осевой линии ВПП.
20° удерживается на продолжении осевой линии ВПП.
АЛК работает в режиме определения ВСП в соответствии с РЭ АЛК.
Координаты ВСЛ на траектории измерений контролируются с помощью точной системы определения местоположения (СТИ/СНС).
Измерения проводятся с удалений ВСЛ от АФУ КРМ, равных 25-30 км с курсом посадки и завершаются в точке "В" - для РМС, КРМ -I, II и III категорий.
Периодические крены ВСЛ на ![]() 20° относительно продольной оси самолета выполняются вначале в одну сторону с креном, равным +20°, и с последующим возвращением к прямолинейному горизонтальному полету, а затем с креном, равным -20°, в противоположную сторону, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюций ВСЛ отклонения курса и линии пути от заданных значений должны поддерживаться минимальными (указатель индикатора курсовых отклонений - в центре шкалы).
20° относительно продольной оси самолета выполняются вначале в одну сторону с креном, равным +20°, и с последующим возвращением к прямолинейному горизонтальному полету, а затем с креном, равным -20°, в противоположную сторону, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюций ВСЛ отклонения курса и линии пути от заданных значений должны поддерживаться минимальными (указатель индикатора курсовых отклонений - в центре шкалы).
По результатам измерений в соответствии с РЭ АЛК вычисляется и документируется величина вертикальной составляющей поляризации поля КРМ и ее влияние на качество пилотирования ВС.
26. Проверка работы системы автоматического контроля КРМ (далее - САК КРМ) проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС инструментального захода ВС на посадку.
Перед проведением этой проверки бортовой инженер-оператор АЛК координирует свои действия с инженерно-техническим персоналом РМС инструментального захода ВС на посадку.
а) проверка САК КРМ при смещении положения средней линии курса осуществляется при полете ВСЛ по осевой линии ВПП в соответствии с методикой, приведенной в пункте 22.
Для того, чтобы при отклонении линии курса (![]() ) от номинального значения за пределы установленных допусков (
) от номинального значения за пределы установленных допусков (![]() : КРМ - I категории:
: КРМ - I категории: ![]() 10,5 м/35,0 фут;
10,5 м/35,0 фут; ![]() : КРМ - II категории:
: КРМ - II категории: ![]() 7,5 м/25,0 фут;
7,5 м/25,0 фут; ![]() : КРМ - III категории:
: КРМ - III категории: ![]() 6,0 м/20,0 фут) подавался сигнал "аварии", наземный инженерно-технический персонал РМС регулирует оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение ЛК вправо и влево от оси ВПП) эта регулировка вызывала срабатывание аварийной сигнализации устройства контроля положения линии курса ("авария по нулю").
6,0 м/20,0 фут) подавался сигнал "аварии", наземный инженерно-технический персонал РМС регулирует оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение ЛК вправо и влево от оси ВПП) эта регулировка вызывала срабатывание аварийной сигнализации устройства контроля положения линии курса ("авария по нулю").
После этой проверки органы регулировки КРМ возвращаются в исходное положение, соответствующее нормальным эксплуатационным условиям курсового радиомаяка;
б) проверку САК КРМ при увеличении (уменьшении) чувствительности к смещению от линии курса (при изменении крутизны характеристики КРМ) целесообразно проводить после обычной проверки чувствительности к смещению по методике, приведенной в пункте 23.
При этой проверке наземный инженерно-технический персонал радиомаяка настраивает чувствительность к смещению от линии курса (крутизну характеристики КРМ) на широкие (расширение полусектора курса - уменьшение чувствительности) и узкие (сужение полусектора курса - увеличение чувствительности) пределы срабатывания сигналов "аварии", и производится проверка чувствительности к смещению в каждом из этих случаев до момента срабатывания системы автоматического контроля ("авария по крутизне").
После проверки устройства контроля чувствительности к смещению от ЛК и настройки пределов срабатывания сигнала "аварии по крутизне" необходимо восстановить уровень чувствительности к смещению, соответствующий нормальным эксплуатационным условиям курсового радиомаяка;
в) проверка САК КРМ при уменьшении мощности излучения радиомаяка проводится только при вводе КРМ в эксплуатацию. Напряженность поля, создаваемого сигналом КРМ (Ек), измеряется на линии курса, на максимально используемом расстоянии, но не менее 33,3 км (18 м. миль) при мощности радиомаяка, составляющей 80% от номинального значения для двухчастотного радиомаяка и 50% от номинального значения для одночастотного КРМ.
При величине напряженности электромагнитного поля (Ек) менее 40 мкВ/м мощность радиомаяка увеличивается для обеспечения напряженности, равной, по крайней мере, 40 мкВ/м, а предел срабатывания контрольного устройства настраивается таким образом, чтобы сигнал "аварии" срабатывал при этом уровне.
В процессе маневрирования ВСЛ измеряется зона действия КРМ в горизонтальной плоскости при уменьшенной мощности излучения радиомаяка в соответствии с методикой, приведенной в пункте 20, при этом выполняются два захода ВСЛ: один заход под углом +35°, а второй - под углом -10° или один заход под углом -35°, а второй - под углом +10° к осевой линии ВПП.
Кроме того, при выполнении этой проверки проводятся измерения и оценка величины амплитуды искривлений курсовой линии (![]() ) в соответствии с методикой, приведенной в пункте 22.
) в соответствии с методикой, приведенной в пункте 22.
После проверки работоспособности КРМ при уменьшении мощности излучения и настройки пределов срабатывания сигнала "аварии" необходимо восстановить уровень мощности излучения, соответствующий нормальным эксплуатационным условиям курсового радиомаяка.
27. Большинство параметров и характеристик наземного радиотехнического устройства, излучающего в пространство радиосигналы, содержащие информацию для управления ВС в вертикальной плоскости при выполнении ими захода на посадку (далее - глиссадный радиомаяк PMC/ILS) могут быть проверены с помощью двух основных схем маневрирования ВСЛ: захода на посадку вдоль линии курса и горизонтального прохода или орбитального полета ВСЛ через сектор курса КРМ. Варианты этих методов предусматривают маневрирование ВСЛ при имитации захода на посадку по глиссаде, выше и ниже глиссады или с траверза курсовой линии, а также горизонтальный полет слева и справа от продолжения осевой линии ВПП. Путем подбора оптимальных исходных расстояний и траектории полета, а также технических характеристик АЛК можно выполнить несколько измерений в ходе одного маневра ВСЛ, важно, чтобы при выполнении этих измерений осуществлялась запись проверяемых параметров и характеристик в устройстве регистрации и на записи делались отметки определенных событий, необходимые для послеполетного анализа.
28. Основной целью проверки фазирования антенн глиссадного радиомаяка (летная настройка - "фазировка по воздуху") является подтверждение наличия оптимальной фазы между передающими антеннами радиомаяка. Данная проверка проводится при вводе РМС в эксплуатацию (при необходимости - при периодических летных проверках).
Проверка правильности фазирования антенн ГРМ с помощью летных измерений проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС инструментального захода ВС на посадку.
Перед выполнением этой проверки БО АЛК согласовывает свои действия с наземным ИТП радиомаяка с целью выбора схемы маневрирования ВСЛ и определения оптимальной зоны для проведения летной настройки ГРМ.
Проверка фазирования АФУ ГРМ осуществляется при горизонтальном полете ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с удаления, равного 25-28 км от порога ВПП по линии курса, без снижения, на высоте 300-460 м (1000-1500 фут), но не ниже безопасной.
Схема маневрирования ВСЛ при проверке фазирования АФУ ГРМ приведена на рисунке 11 приложения N 1.
На ГРМ ИТП радиомаяка устанавливает режим проверки фазирования в соответствии с руководством по эксплуатации данного типа оборудования РМС.
АЛК работает в режиме определения УХ ГРМ в соответствии с РЭ АЛК.
Измерения выполняются с удаления ВСЛ 25-28 км от АФУ ГРМ и завершаются на расстоянии 8-12 км от порога ВПП. Через каждые 2-3 секунды БО АЛК информирует по радиосвязи инженерно-технический персонал радиомаяка о величине выходного тока навигационного приемника по каналу глиссады. По принимаемой информации инженерно-технический персонал ГРМ выполняет при необходимости соответствующие регулировки. Оптимальным условием этой проверки является "нуль" на микроамперметре бортового навигационного приемника АЛК в канале глиссады. Если показания микроамперметра на борту ВСЛ составляют величину более ![]() 10,0 мкА, то наземному инженерно-техническому персоналу радиомаяка необходимо выяснить причину и произвести фазирование передающих антенн ГРМ заново, предварительно проверив исправность антенно-фидерного тракта.
10,0 мкА, то наземному инженерно-техническому персоналу радиомаяка необходимо выяснить причину и произвести фазирование передающих антенн ГРМ заново, предварительно проверив исправность антенно-фидерного тракта.
29. Проверка зависимости информационного параметра глиссадного сигнала (РГМ) от угла относительно линии глиссады, соответствующего этому параметру (далее - угломестная характеристика ГРМ (УХ ГРМ) - клиренс при смещении от линии глиссады), позволяет убедиться в наличии безопасной зоны между нижней и верхней границами сектора глиссады, что свидетельствует о правильности фазирования передающих антенн глиссадного радиомаяка.
Угломестная характеристика ГРМ определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме по линии курса в направлении на ГРМ с удаления, соответствующего углу места, равному 0,3![]() (25-28 км), до расстояния, соответствующего углу места, равному 1,75
(25-28 км), до расстояния, соответствующего углу места, равному 1,75![]() , от АФУ ГРМ с проходом точки "В", без снижения, на высоте полета 300-460 м (1000-1500 фут), но не менее безопасной.
, от АФУ ГРМ с проходом точки "В", без снижения, на высоте полета 300-460 м (1000-1500 фут), но не менее безопасной.
Расстояние до точки выхода ВСЛ из четвертого разворота на посадочную прямую рассчитывается БО АЛК и зависит от установленного (номинального) угла глиссады (![]() o) данного направления посадки и высоты полета ВСЛ.
o) данного направления посадки и высоты полета ВСЛ.
Схема маневрирования ВСЛ при проверке угломестной характеристики ГРМ приведена на рисунке 11 приложения N 1.
АЛК работает в режиме определения УХ ГРМ в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "грубо" по углу места (каналу глиссады) или от бортовой СНС.
Измерения информационных параметров (PГMi, ![]() ) выполняются при наличии устойчивой информации о траектории полета ВСЛ с максимально возможного удаления и завершаются после прохода ВСЛ точки "В".
) выполняются при наличии устойчивой информации о траектории полета ВСЛ с максимально возможного удаления и завершаются после прохода ВСЛ точки "В".
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра ГРМ (PГMi) и угла отклонения ВСЛ от траектории глиссады (![]() ), по которым проводятся экспресс-анализ и оценка угломестной характеристики ГРМ в соответствии с РЭ АЛК. Запись контролируемых ИП и
), по которым проводятся экспресс-анализ и оценка угломестной характеристики ГРМ в соответствии с РЭ АЛК. Запись контролируемых ИП и ![]() осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
Значение информационного параметра радиомаяка (PГMi) составляет:
ниже глиссады: от угла места, равного ![]() , до угла, равного 0,45
, до угла, равного 0,45![]() относительно горизонта, - линейное возрастание РГМ от "0" до РГМ
относительно горизонта, - линейное возрастание РГМ от "0" до РГМ ![]() 0,22; от угла, равного 0,45
0,22; от угла, равного 0,45![]() , до угла, равного 0,3
, до угла, равного 0,3![]() , - значение РГМ
, - значение РГМ ![]() 0,22. Если значение РГМ
0,22. Если значение РГМ ![]() 0,22 достигается под углом больше 0,45
0,22 достигается под углом больше 0,45![]() необходимо поддерживать этот уровень до угла 0,45
необходимо поддерживать этот уровень до угла 0,45![]() относительно горизонта;
относительно горизонта;
выше глиссады: от угла места, равного ![]() , - линейное возрастание РГМ от "0" до РГМ
, - линейное возрастание РГМ от "0" до РГМ ![]() 0,175, до угла места, равного 1,75
0,175, до угла места, равного 1,75![]() . Если значение РГМ, равное 0,175. достигается под углом меньшим 1,75
. Если значение РГМ, равное 0,175. достигается под углом меньшим 1,75![]() , то РГМ поддерживается на уровне не менее 0,175 до угла, равного 1,75
, то РГМ поддерживается на уровне не менее 0,175 до угла, равного 1,75![]() .
.
Изменения информационного параметра ГРМ/ILS (РГМв/н) и допуски для пространственной диаграммы направленности излучения глиссадного радиомаяка приведены на рисунке 12 приложения N 1.
30. Проверка определенного сектора воздушного пространства в горизонтальной плоскости, в пределах которого сигнал глиссадного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия ГРМ в горизонтальной плоскости) выполняется для подтверждения того, что ГРМ обеспечивает пользователя правильной информацией в пределах всей зоны эксплуатационного применения радиомаяка.
Зона действия глиссадного радиомаяка в горизонтальной плоскости (ЗДгг) проверяется на расстояниях не менее 18,5 км (10,0 м. миль) от АФУ ГРМ. На удалениях более 18,5 км (10,0 м. миль) зона действия проверяется исходя из требований использования глиссады при заходе на посадку.
Зона действия ГРМ в горизонтальной плоскости в пределах сектора, равного ![]() 8°, относительно курсовой линии определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме без снижения, на высоте 300-460 м (1000-1500 фут), но не ниже безопасной и дальнейшим уходом на второй круг, с удалений от АФУ ГРМ, равных 20-22 км, с курсами полета, отличными от посадочного на
8°, относительно курсовой линии определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме без снижения, на высоте 300-460 м (1000-1500 фут), но не ниже безопасной и дальнейшим уходом на второй круг, с удалений от АФУ ГРМ, равных 20-22 км, с курсами полета, отличными от посадочного на ![]() 8°. Эта проверка при полетах по линии курса проводится одновременно с проверкой УХ ГРМ и использованием одного и того же профиля полета ВСЛ.
8°. Эта проверка при полетах по линии курса проводится одновременно с проверкой УХ ГРМ и использованием одного и того же профиля полета ВСЛ.
Схема маневрирования ВСЛ при определении зоны действия ГРМ в горизонтальной плоскости (ЗДгг) приведена на рисунке 11 приложения N 1.
АЛК работает в режиме определения зоны действия ГРМ в горизонтальной плоскости в соответствии с РЭ АЛК.
Измерения выполняются с удаления 20-22 км от АФУ ГРМ и завершаются в точке "В" для РМС, ГРМ - I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения напряженности электромагнитного поля ГРМ (Ег) и дальности ВСЛ от АФУ ГРМ (Дi - при наличии соответствующей аппаратуры), по которым проводятся экспресс-анализ и оценка зоны действия ГРМ в горизонтальной плоскости (ЗДгг) в соответствии с РЭ АЛК. Запись контролируемых Ег и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
Величина напряженности электромагнитного поля глиссадного радиомаяка (Ег) составляет не менее 400 мкВ/м, и ток бленкера навигационного приемника в азимутальном секторе, равном ![]() 8°, по обе стороны от осевой линии ВПП имеет удовлетворительные рабочие характеристики до расстояния 18,5 км (10 м. миль) от порога ВПП и в вертикальной плоскости до верхнего значения угла, равного 1,75
8°, по обе стороны от осевой линии ВПП имеет удовлетворительные рабочие характеристики до расстояния 18,5 км (10 м. миль) от порога ВПП и в вертикальной плоскости до верхнего значения угла, равного 1,75![]() , и до нижнего значения угла, равного 0,45
, и до нижнего значения угла, равного 0,45![]() , над горизонтальной плоскостью либо ниже этой величины - до угла, равного 0,3
, над горизонтальной плоскостью либо ниже этой величины - до угла, равного 0,3![]() , если это требуется для безопасного выполнения предпосадочного маневра воздушного судна.
, если это требуется для безопасного выполнения предпосадочного маневра воздушного судна.
Характеристики зоны действия глиссадного радиомаяка РМС типа ILS в горизонтальной плоскости (ЗДгг) приведены на рисунке 13 приложения N 1.
31. Проверка определенного сектора воздушного пространства в вертикальной плоскости, в пределах которого сигнал глиссадного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия ГРМ в вертикальной плоскости) выполняется одновременно с полетами по проверке УХ ГРМ (клиренса) и использованием одного и того же профиля полета ВСЛ.
Зона действия ГРМ в вертикальной плоскости (ЗДгв) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме без снижения, на высоте круга, с курсом посадки и с курсами, отличными от посадочного на ![]() 8°, с удаления от АФУ ГРМ, соответствующего углу места, равному 0,45
8°, с удаления от АФУ ГРМ, соответствующего углу места, равному 0,45![]() .
.
Схема маневрирования ВСЛ при определении зоны действия ГРМ в вертикальной плоскости (ЗДгв) приведена на рисунке 11 приложения N 1.
АЛК работает в режиме определения зоны действия ГРМ в вертикальной плоскости в соответствии с РЭ АЛК АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "грубо" по углу места (каналу глиссады) или от бортовой СНС.
Измерения проводятся при наличии информации о траектории полета ВСЛ с максимально возможного удаления и завершаются после прохода ВСЛ точки пересечения угла места, равного 1,75![]() .
.
В процессе полета ВСЛ от угла, равного 0,45![]() (0,3
(0,3![]() ), до угла, равного 1,75
), до угла, равного 1,75![]() , измеряются значения напряженности электромагнитного поля радиомаяка (Ег), которые составляют не менее 400 мкВ/м, и проводится анализ зоны действия ГРМ в вертикальной плоскости в соответствии с РЭ АЛК.
, измеряются значения напряженности электромагнитного поля радиомаяка (Ег), которые составляют не менее 400 мкВ/м, и проводится анализ зоны действия ГРМ в вертикальной плоскости в соответствии с РЭ АЛК.
Для ГРМ - I, II и III категорий значение информационного параметра радиомаяка (PГMi - величина тока на выходе глиссадного тракта измерения информационного параметра) составляет:
ниже глиссады: плавно увеличивается до значения РГМ ![]() 0,22 (315,0 мкА) под углом над горизонталью 0,3
0,22 (315,0 мкА) под углом над горизонталью 0,3![]() . Если значение РГМ
. Если значение РГМ ![]() 0,22 (315,0 мкА) достигается под углом больше 0,45
0,22 (315,0 мкА) достигается под углом больше 0,45![]() необходимо поддерживать этот уровень до угла, равного 0,45
необходимо поддерживать этот уровень до угла, равного 0,45![]() относительно горизонта;
относительно горизонта;
выше глиссады: плавно возрастает от 0 до значения РГМ ![]() 0,22 (315,0 мкА) до угла, равного 1,75
0,22 (315,0 мкА) до угла, равного 1,75![]() относительно горизонта.
относительно горизонта.
Характеристики зоны действия глиссадного радиомаяка РМС типа ILS в вертикальной плоскости (ЗДгв) приведены на рисунке 13 приложения N 1.
32. Геометрическое место точек зоны действия ГРМ в вертикальной плоскости, содержащей ось ВПП, ближайших к земной поверхности, в которых информационный параметр глиссадного сигнала (РГМ) равен нулю (далее - угол наклона глиссады - точность юстировки глиссады - ![]() ) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с дальности 12-20 км, последующим снижением по глиссаде и дальнейшим уходом на второй круг.
) определяется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с дальности 12-20 км, последующим снижением по глиссаде и дальнейшим уходом на второй круг.
Схема маневрирования ВСЛ при определении угла наклона глиссады приведена на рисунке 14 приложения N 1.
Проверка угла наклона глиссады снижения (проверка точности юстировки глиссады - ![]() ) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений, которая поступает в бортовой вычислитель от наземной СТИ или от СНС (ГЛОНАСС/GPS). При этой проверке одновременно определяется смещение линии глиссады относительно усредненной глиссады такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений линии глиссады -
) выполняется с использованием точной информации о маневрировании ВСЛ на траектории измерений, которая поступает в бортовой вычислитель от наземной СТИ или от СНС (ГЛОНАСС/GPS). При этой проверке одновременно определяется смещение линии глиссады относительно усредненной глиссады такой амплитуды и частоты, которое может отслеживаться воздушным судном, выполняющим заход на посадку по приборам (далее - амплитуда искривлений линии глиссады - ![]() - структура глиссады) и вычисляется высота опорной точки PMC ("T"/RDH).
- структура глиссады) и вычисляется высота опорной точки PMC ("T"/RDH).
АЛК работает в режиме определения угла наклона глиссады и амплитуды искривлений линии глиссады в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по углу места (каналу глиссады) или от бортовой СНС с наземной спутниковой станцией поправок.
Измерения амплитуды искривлений линии глиссады выполняются после выхода ВСЛ из четвертого разворота на посадочную прямую с дальности, на которой обеспечивается устойчивая информация от системы траекторных измерений, но не менее чем от точки "А" и завершаются над точкой "С" для РМС, ГРМ - I категории и порогом ВПП для РМС, ГРМ - II и III категорий. Угол наклона глиссады определяется на участке от точки "А" до точки "В" для РМС, ГРМ - I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра ГРМ (PГMi), угловые координаты траектории полета ВСЛ по глиссаде (![]() ) и дальности (Дi - при наличии соответствующей аппаратуры), по которым определяется угол наклона глиссады (
) и дальности (Дi - при наличии соответствующей аппаратуры), по которым определяется угол наклона глиссады (![]() ), пределы установки (допуски на юстировку) среднего угла глиссады относительно номинального угла (
), пределы установки (допуски на юстировку) среднего угла глиссады относительно номинального угла (![]() ), выполняется построение залегания линии глиссады, вычисляется амплитуда искривлений линии глиссады (
), выполняется построение залегания линии глиссады, вычисляется амплитуда искривлений линии глиссады (![]() ) и определяется высота опорной точки PMC ("T"/RDH) в соответствии с РЭ АЛК. Запись контролируемых ИП,
) и определяется высота опорной точки PMC ("T"/RDH) в соответствии с РЭ АЛК. Запись контролируемых ИП, ![]() и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
По полученным результатам вычисляются и документируются:
точность юстировки глиссады;
амплитуда искривлений линии глиссады;
высота опорной точки PMC ("T"/RDH).
При вводе ГРМ в эксплуатацию угол наклона глиссады (![]() ) устанавливается как можно ближе к номинальному (
) устанавливается как можно ближе к номинальному (![]() o) для данного направления посадки углу снижения (в соответствии с аэронавигационным паспортом аэродрома).
o) для данного направления посадки углу снижения (в соответствии с аэронавигационным паспортом аэродрома).
При периодических летных проверках угол наклона глиссады (![]() ) поддерживается в пределах следующих допусков от номинального угла (
) поддерживается в пределах следующих допусков от номинального угла (![]() ):
):
![]() 0,075
0,075![]() о (
о (![]() 7,5%) - для PMC/ILS, ГРМ - I и II категорий;
7,5%) - для PMC/ILS, ГРМ - I и II категорий;
![]() 0,040
0,040![]() о (
о (![]() 4,0%) - для PMC/ILS, ГРМ - III категории.
4,0%) - для PMC/ILS, ГРМ - III категории.
Допуски на величину амплитуды искривлений линии глиссады РМС типа ILS (![]() - структура глиссады) составляют:
- структура глиссады) составляют:
от границы зоны действия до точки "С" - ![]() 0,035 РГМ (
0,035 РГМ (![]() 50,0 мкА) - для ГРМ - I категории;
50,0 мкА) - для ГРМ - I категории;
от границы зоны действия до точки "А" - ![]() 0,035 РГМ (
0,035 РГМ (![]() 50,0 мкА) - для ГРМ - II и III категорий;
50,0 мкА) - для ГРМ - II и III категорий;
от точки "А" до точки "В" - линейное уменьшение до ![]() 0,023 РГМ (
0,023 РГМ (![]() 30,0 мкА) - для ГРМ - II и III категорий;
30,0 мкА) - для ГРМ - II и III категорий;
от точки "В" до опорной точки "T"/RDH - не более ![]() 0,023 РГМ (
0,023 РГМ (![]() 30,0 мкА) - для ГРМ - II и III категорий.
30,0 мкА) - для ГРМ - II и III категорий.
Вычисление высоты опорной точки PMC ("T"/RDH) проводится по полученным результатам информационных параметров радиомаяка (РГМi), угла отклонения ВСЛ от траектории глиссады (![]() i) и дальности до АФУ ГРМ (Дi) в соответствии с РЭ АЛК на участках:
i) и дальности до АФУ ГРМ (Дi) в соответствии с РЭ АЛК на участках:
от точки "А" до точки "В" - расчетная высота опорной точки ("T"/RDH);
от дальности 1830 м от порога ВПП со стороны захода на посадку до удаления 300 м от порога ВПП - фактическая высота опорной точки ("T"/RDH).
Для определения высоты опорной точки PMC/ILS ("T"/RDH) над порогом ВПП среднее положение угла наклона глиссады (![]() ) между точками "А" и "В" на траектории снижения PMC/ILS представляется в виде прямой (при этом предполагается, что геометрическое место точек глиссады в вертикальной плоскости, содержащей осевую линию ВПП, является совершенной гиперболой и продолжение глиссады является асимптотой к этой гиперболе) и измеряется между этой прямой линией и ее проекцией по вертикали на горизонтальную плоскость.
) между точками "А" и "В" на траектории снижения PMC/ILS представляется в виде прямой (при этом предполагается, что геометрическое место точек глиссады в вертикальной плоскости, содержащей осевую линию ВПП, является совершенной гиперболой и продолжение глиссады является асимптотой к этой гиперболе) и измеряется между этой прямой линией и ее проекцией по вертикали на горизонтальную плоскость.
Влияние усредненных значений отклонений глиссады в районе между точкой "В" (БПРМ) и порогом ВПП приводит к проецированию опорной точки ("T"/RDH), которая отличается от рассчитанной на участке от точки "А" до точки "В". Фактическая опорная точка определяется только в процессе летной проверки, и ее значение отражается в материалах отчета по летной проверке. Расчет фактической высоты опорной точки проводится по измеренным значениям информационных параметров глиссадного радиомаяка (PГMi, ![]() , Дi) на участке глиссады, расположенном между точками 1830 м (6000 фут) и 300 м (1000 фут) от порога ВПП. Этот участок глиссады снижения (1830-300 м) представляется в виде прямой, продолженной до точки приземления.
, Дi) на участке глиссады, расположенном между точками 1830 м (6000 фут) и 300 м (1000 фут) от порога ВПП. Этот участок глиссады снижения (1830-300 м) представляется в виде прямой, продолженной до точки приземления.
Высота опорной точки PMC/ILS ("T"/RDH) проверяется только при вводе РМС в эксплуатацию и/или при присвоении категории радиомаячной системе инструментального захода ВС на посадку, и величина ее составляет:
15,0 м +3,0 м (50,0 фут +10,0 фут) - для РМС, ГРМ - I, II и III категорий;
12,0 м +6,0 м (40,0 фут +20,0 фут) - для РМС, ГРМ - I категории, установленных на коротких ВПП (по классификации ИКАО, код 1, 2 - длина ВПП 1200 м и менее).
33. Проверка отношения измеренной РГМ к соответствующему угловому смещению относительно соответствующей опорной линии (далее - чувствительность к угловому смещению от линии глиссады - крутизна характеристики ГРМ) осуществляется на основе измерений, выполняемых между точками "А" и "В" на траектории снижения РМС. При этом ВСЛ маневрирует по верхней и нижней границам полусектора глиссады.
Схема маневрирования ВСЛ при определении чувствительности к смещению от линии глиссады приведена на рисунке 14 приложения N 1.
АЛК работает в режиме определения чувствительности к смещению от линии глиссады в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по углу места (каналу глиссады) или от бортовой СНС.
Для удобства пилотирования ВСЛ по границам полусектора с выдерживанием стрелки глиссады в центре шкалы индикаторного навигационного прибора, подобно пилотированию ВСЛ по линии глиссады, ток в цепи индикатора глиссады компенсируется током обратной полярности от АЛК. Любое отклонение ВСЛ в сторону от линии курса с нулевой РГМ приведет к снижению точности измерений.
Проверка чувствительности к смещению от линии глиссады (Sг) выполняется на посадочной прямой при полете ВСЛ по верхней (нижней) границе полусектора глиссады от точки "А" до точки "В" на траектории снижения для ГРМ - I, II и III категорий.
В процессе маневрирования ВСЛ измеряются текущие значения информационных параметров ГРМ (РГМпсг в(н)i), угла отклонения ВСЛ от границы верхней (нижней) части полусектора глиссады (![]() пcг вi,
пcг вi, ![]() пcг нi) и дальности до АФУ ГРМ (Дi - при наличии соответствующей аппаратуры) в соответствии с РЭ АЛК, по которым проводятся экспресс-анализ и оценка крутизны характеристики ГРМ. Запись контролируемых ИП,
пcг нi) и дальности до АФУ ГРМ (Дi - при наличии соответствующей аппаратуры) в соответствии с РЭ АЛК, по которым проводятся экспресс-анализ и оценка крутизны характеристики ГРМ. Запись контролируемых ИП, ![]() псг вi,
псг вi, ![]() псг нi и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
псг нi и Дi осуществляется в устройстве регистрации и на записи делаются отметки определенных событий, необходимые для послеполетного анализа.
По полученным результатам вычисляются и документируются:
величина верхней (нижней) части полусектора глиссады (![]() псг в,
псг в, ![]() псг н), мин;
псг н), мин;
значение чувствительности к смещению от линии глиссады (Sг) и ее отклонение (![]() Sг) от номинального значения в процентах по формулам:
Sг) от номинального значения в процентах по формулам:
![]() РГМ/мин или
РГМ/мин или ![]() мкА/град
мкА/град
![]() где
где
коэффициент К = 125 - величина тока компенсации при полете ВСЛ по границам полусектора глиссады сверху (снизу), мкА;
![]() псг о - номинальная величина полусектора глиссады, мин;
псг о - номинальная величина полусектора глиссады, мин;
![]() псг в - величина верхней части полусектора глиссады, мин;
псг в - величина верхней части полусектора глиссады, мин;
![]() псг н - величина нижней части полусектора глиссады, мин.
псг н - величина нижней части полусектора глиссады, мин.
Величину верхней (нижней) части полусектора глиссады рекомендуется устанавливать, равной 0,12![]() о. Размеры верхней (
о. Размеры верхней (![]() псг в) и нижней (
псг в) и нижней (![]() псг н) частей полусектора глиссады по возможности устанавливаются как можно симметричнее.
псг н) частей полусектора глиссады по возможности устанавливаются как можно симметричнее.
Отклонение информационного параметра ГРМ (![]() Sг), который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВС от линии глиссады (крутизна характеристики выходного сигнала канала глиссады) от установленного (номинального) значения выше (ниже) от линии глиссады составляет не более:
Sг), который определяется скоростью нарастания выходного тока бортового приемника в зависимости от величины отклонения ВС от линии глиссады (крутизна характеристики выходного сигнала канала глиссады) от установленного (номинального) значения выше (ниже) от линии глиссады составляет не более:
25,0% - для PMC/ILS, ГРМ - I категории;
20,0% - для PMC/ILS, ГРМ - II категории;
15,0% - для PMC/ILS, ГРМ - III категории.
Если чувствительность к смещению от линии глиссады (крутизна характеристики ГРМ), соответствующая измеренной ширине полусектора глиссады, выходит за границы установленных допусков необходимо отрегулировать чувствительность к смещению радиомаяка заново.
34. Проверка влияния широкого канала на положение угла наклона глиссады проводится для глиссадной системы, зона действия которой создается путем использования двух независимых диаграмм излучения, образуемых разнесенными несущими частотами в пределах определенного канала глиссадного радиомаяка (далее - двухчастотный ГРМ), только при вводе РМС в эксплуатацию.
Оценка влияния широкого канала на положение средней линии глиссады осуществляется при маневрировании ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с выходом на рубеж начала измерений на дальности 10-12 км от порога ВПП, с последующим снижением по глиссаде и с дальнейшим уходом на второй круг.
На ГРМ отключается сигнал широкого канала в соответствии с руководством по эксплуатации данного типа РМС.
АЛК работает в режиме определения положения средней линии курса в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по углу места (каналу глиссады) или от бортовой СНС.
Проверка параметров и характеристик ГРМ при отключенном широком канале проводится в соответствии с методикой, приведенной в пункте 32.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра ГРМ (PГMi), угловые координаты траектории полета ВСЛ по глиссаде (![]() i) и дальности (Дi - при наличии соответствующей, аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии глиссады (
i) и дальности (Дi - при наличии соответствующей, аппаратуры), по которым проводятся экспресс-анализ и оценка положения средней линии глиссады (![]() ) и величина амплитуды искривлений линии глиссады (
) и величина амплитуды искривлений линии глиссады (![]() г) при отключенном широком канале глиссадного радиомаяка.
г) при отключенном широком канале глиссадного радиомаяка.
По полученным результатам вычисляется и документируется величина угла наклона глиссады при отключенном широком канале радиомаяка (![]() уз), которая сравнивается с величиной угла наклона глиссады (
уз), которая сравнивается с величиной угла наклона глиссады (![]() ), измеренной при выполнении заходов ВСЛ по линии глиссады при нормальном функционировании радиомаяка в соответствии с методикой, приведенной в пункте 32, по формуле;
), измеренной при выполнении заходов ВСЛ по линии глиссады при нормальном функционировании радиомаяка в соответствии с методикой, приведенной в пункте 32, по формуле;
![]() где
где
![]() - разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка, мин;
- разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка, мин;
![]() - величина угла наклона глиссады, измеренная при нормально функционирующем ГРМ, мин;
- величина угла наклона глиссады, измеренная при нормально функционирующем ГРМ, мин;
![]() уз - величина угла наклона глиссады, измеренная при отключенном широком канале радиомаяка, мин.
уз - величина угла наклона глиссады, измеренная при отключенном широком канале радиомаяка, мин.
Разность положения среднего угла наклона глиссады при нормальном функционировании ГРМ и отключенном широком канале радиомаяка (![]() ) составляет не более
) составляет не более ![]() 12'(
12'(![]() 0,2°). Если эта разность превышает границы допуска, то радиомаяк настраивается заново.
0,2°). Если эта разность превышает границы допуска, то радиомаяк настраивается заново.
35. Проверка работы системы автоматического контроля ГРМ (далее - САК ГРМ) проводится с использованием методов, рекомендуемых в руководстве по эксплуатации на данный тип РМС. Перед проведением этой проверки бортовой инженер-оператор координирует свои действия с инженерно-техническим персоналом радиомаяка:
а) проверка САК ГРМ при смещении угла наклона глиссады осуществляется при полете ВСЛ по глиссаде и осевой линии ВПП в соответствии с методикой, приведенной в пункте 32.
Для того, чтобы при отклонении угла глиссады (![]() ) от номинального значения за пределы установленных допусков (
) от номинального значения за пределы установленных допусков (![]() : ГРМ - I, II категорий в пределах 0,075
: ГРМ - I, II категорий в пределах 0,075![]() о (7,5%) от номинального угла;
о (7,5%) от номинального угла; ![]() : ГРМ - III категории в пределах 0,04
: ГРМ - III категории в пределах 0,04![]() о (4,0%) от номинального угла) подавался сигнал "аварии", инженерно-технический персонал РМС настраивает оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение линии глиссады выше и ниже от номинального угла глиссады -
о (4,0%) от номинального угла) подавался сигнал "аварии", инженерно-технический персонал РМС настраивает оборудование радиомаяка таким образом, чтобы в соответствующих случаях (смещение линии глиссады выше и ниже от номинального угла глиссады - ![]() о) эта настройка вызывала срабатывание аварийной сигнализации устройства контроля положения (юстировки) линии глиссады ("авария по 9о").
о) эта настройка вызывала срабатывание аварийной сигнализации устройства контроля положения (юстировки) линии глиссады ("авария по 9о").
Точное значение смещения линии глиссады выше (![]() ав) и ниже (
ав) и ниже (![]() ан) от номинального угла глиссады (
ан) от номинального угла глиссады (![]() o), при котором срабатывает сигнал "аварии", определяется по формулам:
o), при котором срабатывает сигнал "аварии", определяется по формулам:
при правильной настройке САК ГРМ - I и II категорий:
при правильной настройке САК ГРМ - III категории:
 где
где
![]() ав (ан) - величина угла глиссады, при которой срабатывает сигнал "аварии" при смещении линии глиссады выше (ниже) от номинального значения, мин;
ав (ан) - величина угла глиссады, при которой срабатывает сигнал "аварии" при смещении линии глиссады выше (ниже) от номинального значения, мин;
![]() о - номинальное значение угла глиссады данного направления посадки в соответствии с аэронавигационным паспортом аэродрома, мин.
о - номинальное значение угла глиссады данного направления посадки в соответствии с аэронавигационным паспортом аэродрома, мин.
После этой проверки органы регулировки ГРМ возвращаются в исходное положение, соответствующее нормальным эксплуатационным условиям глиссадного радиомаяка;
б) проверку САК ГРМ при увеличении (уменьшении) чувствительности к смещению от линии глиссады (при изменении крутизны характеристики ГРМ) целесообразно проводить после проверки чувствительности к смещению по методике, приведенной в пункте 33.
При этой проверке наземный инженерно-технический персонал радиомаяка настраивает чувствительность к смещению от линии глиссады на широкие (расширение полусектора глиссады - уменьшение чувствительности) и узкие (сужение полусектора глиссады - увеличение чувствительности) пределы срабатывания сигналов "аварии" и производится проверка чувствительности к смещению от линии глиссады в каждом из этих случаев до момента срабатывания системы автоматического контроля ("авария по крутизне").
Метод маневрирования ВСЛ через сектор курса или орбитальный полет используются только в случае хорошей корреляции результатов этих полетов с результатами более точного метода по схеме захода на посадку.
После проверки устройства контроля чувствительности к смещению от ЛГ и настройки пределов срабатывания сигнала "аварии по крутизне" необходимо восстановить уровень чувствительности к смещению, соответствующий нормальным эксплуатационным условиям глиссадного радиомаяка;
в) проверка САК ГРМ при уменьшении мощности излучения радиомаяка проводится только при вводе ГРМ в эксплуатацию. Напряженность поля, создаваемого сигналом ГРМ (Ег), измеряется на максимальном расстоянии, предусмотренном зоной его действия, при этом мощность радиомаяка снижается до уровня срабатывания сигнала "аварии". В том случае, когда с помощью наземной проверки произведено точное измерение предела срабатывания сигнала "аварии" контрольного устройства, можно измерить напряженность поля в обычных эксплуатационных условиях и рассчитать напряженность поля, соответствующую пределу срабатывания сигнала "аварии".
В процессе маневрирования ВСЛ измеряется зона действия ГРМ в горизонтальной плоскости при мощности радиомаяка, составляющей 80% от номинального значения для двухчастотного радиомаяка и 50% от номинального значения для одночастотного ГРМ в соответствии с методикой, приведенной в пункте 30, при этом выполняется два захода ВСЛ: один под углом +8°, а второй под углом -8°.
Величина напряженности поля глиссадного радиомаяка (Ег) при пониженной мощности излучения составляет не менее 400 мкВ/м, а предел срабатывания контрольного устройства регулируется таким образом, чтобы сигнал "аварии" срабатывал при этом уровне.
Кроме того, при выполнении этой проверки проводятся измерение и оценка амплитуды искривлений линии глиссады (![]() г) в соответствии с методикой, приведенной в пункте 32.
г) в соответствии с методикой, приведенной в пункте 32.
После проверки работоспособности ГРМ при уменьшении мощности излучения и настройки пределов срабатывания сигнала "аварии" необходимо восстановить уровень мощности излучения, соответствующий нормальным эксплуатационным условиям глиссадного радиомаяка.
36. Основной целью летной проверки аэродромных (дополнительных, трассовых) маркерных радиомаяков, входящих в состав РМС инструментальной посадки, в состав системы ОСП, в состав отдельных приводных радиостанций (ОПРС/NDB) или трассовых радиомаяков PMA/VOR, сигнализирующих экипажу ВС о моменте прохода характерных точек на траектории снижения (опознавания конкретных пунктов вдоль воздушной трассы), является оценка соответствия зоны действия маркера, определенная путем измерения уровня напряженности электромагнитного поля (Ем), излучаемого антенно-фидерным устройством радиомаяка, и путем визуальной индикации (звуковой сигнализации) требуемым эксплуатационным допускам.
37. Проверка определенной области воздушного пространства, в пределах которой сигнал аэродромного (дополнительного) маркерного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия МРМ) определяется путем прохода ВСЛ над дальним (ближним, внутренним, дополнительным) маркерным радиомаяком по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме по траектории снижения (линии курса и глиссады) и границам полусектора курса, дальнейшим уходом на второй круг и измерением напряженности электромагнитного поля радиомаяка (Ем) на границах и внутри зоны действия МРМ, а также измерением времени, в течение которого обеспечивается визуальная индикация и звуковая сигнализация радиомаяка.
АЛК работает в режиме определения зоны действия МРМ в соответствии с РЭ АЛК.
Для маркерных радиомаяков, входящих в состав РМС инструментального захода ВС на посадку или в состав системы ОСП, измерения выполняются на посадочной прямой, с удаления 10 км от порога ВПП и завершаются после прохода ВСЛ ближнего МРМ (внутреннего МРМ).
Для аэродромных дополнительных маркерных радиомаяков (АДМРМ) полеты ВСЛ выполняются в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов). Измерения выполняются с дальности не менее 2 км от места установки АДМРМ и завершаются через 5-6 секунд после его прохода.
Перекрытие зон действия дальнего и дополнительного МРМ на высотах их использования не допускается.
В процессе полета ВСЛ измеряются значения напряженности электромагнитного поля радиомаяка (Ем) на границах и в зоне действия МРМ, текущие значения дальности от порога ВПП (Дi - при наличии соответствующей аппаратуры), момент превышения уровней сигнала 1,5 мВ/м и 3,0 мВ/м и время отсутствия манипулированного сигнала МРМ (провалы в диаграмме направленности радиомаяка).
Одновременно с проверкой зоны действия МРМ оценивается непрерывность манипулированного сигнала радиомаяка. Оценка манипуляции производится по визуальной и звуковой сигнализации и считается удовлетворительной, когда кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
В процессе проверки напряженности электромагнитного поля маркерного радиомаяка зона действия составляет:
ДМРМ/ОМ - 600 м ![]() 200 м (2000 фут
200 м (2000 фут ![]() 650 фут);
650 фут);
БМРМ/ММ - 300 м ![]() 100 м (1000 фут
100 м (1000 фут ![]() 325 фут);
325 фут);
ВнМР/IМ - 150 м ![]() 50 м (500 фут
50 м (500 фут ![]() 160 фут);
160 фут);
АДМРМ - величина зоны действия зависит от высоты полета ВС (![]() .
.
38. Проверка определенной области воздушного пространства, в пределах которой сигнал трассового маркерного радиомаяка с заданными характеристиками обеспечивает ВС навигационной информацией с допустимой погрешностью (далее - зона действия трассового МРМ) определяется при полетах ВСЛ над маркерным радиомаяком на минимальной безопасной высоте исходя из конкретных условий аэродрома (аэроузла) путем измерения напряженности электромагнитного поля радиомаяка (Ем) на границах и внутри зоны действия МРМ, а также измерением промежутка времени или расстояния, на протяжении которого обеспечивается визуальная индикация сигнала, поступающего от калиброванного маркерного приемника и антенны. Поскольку периодические проверки трассового МРМ, как правило, выполняются одновременно с проверкой радионавигационного средства, установленного на этой же позиции (ОПРС/МРМ, РМА/МРМ), то оба этих средства целесообразно проверять на одной и той же высоте полета ВСЛ.
При вводе трассового МРМ в эксплуатацию зона действия определяется путем непрерывной записи уровня сигнала (напряженности электромагнитного поля радиомаяка - Ем на границах и внутри ЗД МРМ) на регистрирующей аппаратуре. При периодических проверках достаточно измерить время или расстояние, на протяжении которого на борту ВСЛ обеспечивается визуальная индикация (звуковая сигнализация) сигнала радиомаркера.
АЛК работает в режиме определения ЗД МРМ в соответствии с РЭ АЛК.
Выполняется полет ВСЛ над радиомаяком с регистрацией напряженности электромагнитного поля радиомаяка (Ем) на границах и внутри ЗД МРМ или истинной воздушной скорости ВС и промежутка времени или расстояния, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) сигнала радиомаркера. Затем выполняется разворот на 180°, и те же измерения повторяются во время прохода ВСЛ над МРМ с той же воздушной скоростью в противоположном направлении. Эти два полета необходимы для того, чтобы за счет усреднения исключить влияние скорости ветра и других факторов, таких как задержка в приемнике, наклон или асимметрия диаграммы направленности бортовой антенны и др.
В процессе полета ВСЛ измеряются значения напряженности электромагнитного поля радиомаяка (Ем) на границах зоны действия МРМ, момент превышения уровня сигнала 3,0 мВ/м и время отсутствия манипулированного сигнала МРМ (провалы в диаграмме направленности радиомаяка). При проверке зоны действия трассового МРМ (ОПРС/МРМ, РМА/МРМ) на борту ВСЛ наблюдается визуальная индикация (звуковая сигнализация) момента пролета данного пункта на воздушной трассе. Центр зоны действия радиомаяка находится над центром АФУ МРМ.
Величина зоны действия трассового МРМ (![]() D) зависит от высоты полета ВС (Нп), т.е.
D) зависит от высоты полета ВС (Нп), т.е. ![]() и определяется путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) маркера и истинной воздушной скорости полета ВСЛ, по формуле:
и определяется путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) маркера и истинной воздушной скорости полета ВСЛ, по формуле:
![]() где
где
![]() D - ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
D - ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
![]() и
и ![]() - истинная воздушная скорость ВСЛ при полете над МРМ с одного и противоположного направлений полета, м/с;
- истинная воздушная скорость ВСЛ при полете над МРМ с одного и противоположного направлений полета, м/с;
![]() и
и ![]() - продолжительность визуальной индикации (звуковой сигнализации) маркера при полете ВСЛ над МРМ с одного и противоположного направлений, с.
- продолжительность визуальной индикации (звуковой сигнализации) маркера при полете ВСЛ над МРМ с одного и противоположного направлений, с.
При вводе трассового МРМ в эксплуатацию зону действия необходимо устанавливать в пределах ![]() 25% от номинальной (согласно эксплуатационным требованиям на этот тип радиомаркера).
25% от номинальной (согласно эксплуатационным требованиям на этот тип радиомаркера).
При периодических проверках допускается поддерживать зону действия трассового МРМ в пределах ![]() 50% от номинальной.
50% от номинальной.
Оценка манипуляции производится по визуальной и звуковой сигнализации и считается удовлетворительной, когда кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
При вводе радиомаяка в эксплуатацию необходимо убедиться в правильности расположения центра его зоны действия. Обычно он располагается над МРМ, однако иногда из-за неблагоприятных условий места размещения маркера полярная ось его диаграммы направленности может быть отклонена от вертикали. В этих случаях в эксплуатационных схемах полетов следует указать правильное положение центра зоны действия относительно точно замеренного контрольного ориентира на поверхности земли. Положение центра зоны действия МРМ можно проверить при выполнении полетов ВСЛ над маркером путем регистрации на непрерывной записи моментов, когда ВС находится непосредственно над радиомаяком. Среднее значение при двух записях, взятое относительно отметки на записи, показывает, располагается ли центр зоны действия над маркером. Отдельные записи, сделанные на регистрирующей аппаратуре при полетах в каждом из направлений, редко бывают симметричными относительно этого контрольного ориентира из-за влияния асимметрии диаграммы направленности радиомаркера, наклона диаграммы направленности бортовой антенны, задержек в тракте приемника и т.д., что необходимо учитывать при определении положения центра зоны действия МРМ.
III. Методики летных проверок параметров и характеристик
азимутально-дальномерных радиомаяков ближней навигации
39. Для обеспечения навигации на воздушных трассах используются азимутально-дальномерные радиомаяки следующих типов:
азимутальный радиомаяк (PMA/VOR (DVOR), представляющий собой наземное радиотехническое средство малой дальности (около 370 км или 200 м. миль) и предназначенный для определения угла между направлением на магнитный север и направлением на радиомаяк (пеленга) на борту ВС;
радиотехническая система ближней навигации (РСБН), представляющая собой совокупность наземного радиомаяка и бортового оборудования, обеспечивающая получение в пределах зоны действия информации об азимуте и дальности ВС на его борту и на радиомаяке или только на борту ВС;
радиомаяк дальномерный (РМД/DME), представляющий собой наземное радиотехническое средство, обеспечивающее экипаж ВС по запросным сигналам бортового оборудования информацией о текущей дальности на этапах подхода, вылета и на маршруте в зависимости от того, где установлен радиомаяк;
радиомаяк дальномерный навигационно-посадочный (РМД-НП/DME-N), представляющий собой наземное радиотехническое средство, обеспечивающее экипаж ВС по запросным сигналам бортового оборудования информацией о текущей дальности до порога ВПП в режиме захода ВС на посадку.
40. При вводе в эксплуатацию азимутально-дальномерных радиомаяков ближней навигации (PMA/VOR(DVOR), РСБН, РМД/DME, РМД-НП/DME-N) проверяются первый и второй комплекты аппаратуры этих радиомаяков на всех основных обслуживаемых воздушных трассах (коридорах) в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов).
При второй летной проверке (периодической) измеряются параметры и характеристики только первых комплектов аппаратуры не менее чем на двух воздушных трассах, вторые комплекты проверяются (при необходимости подстраиваются) по показаниям наземной контрольной аппаратуры. При третьей летной проверке (периодической) измеряются параметры и характеристики вторых комплектов аппаратуры, первые комплекты проверяются (при необходимости подстраиваются) по показаниям наземной контрольной аппаратуры. При проведении последующих периодических летных проверок, кроме специальных, комплекты аппаратуры радиомаяков проверяются поочередно.
Расчетное время проверки точностных характеристик азимутально-дальномерных радиомаяков PMA/VOR (DVOR), РСБН, РМД/DME, РМД-НП/DME-N на одной воздушной трассе и высоте полета ВСЛ, равной 5700-6000 м (9000-11000 м), при вводе их в эксплуатацию составляет четыре часа (проверяется два комплекта аппаратуры), при периодических летных проверках - два часа (проверяется один комплект аппаратуры).
С целью выявления систематической ошибки азимутальных радиомаяков (PMA/VOR (DVOR), РСБН) при вводе их в эксплуатацию выполняется полет ВСЛ на высоте 700-1000 м (2000-3000 фут), но не менее безопасной, по трем орбитам радиусами 20 км, 30 км и 40 км относительно АФУ радиомаяка.
В процессе орбитального полета, по информации с борта ВСЛ проводится регулировка радиомаяка для исключения систематической ошибки по азимуту/пеленгу и летная оценка результатов этой регулировки, определяются трассы, на которых ошибка определения азимута/пеленга превышает допустимую величину.
Для азимутального радиомаяка PMA/VOR (DVOR) дополнительно в этих полетах выполняется проверка индикации полярности направления полета ВС и правильности направления вращения стрелки индикатора курсовых отклонений бортовой навигационной аппаратуры.
Проверка индикации полярности направления полета выполняется в начале летной проверки по соответствующему радиалу (при выходе на орбиту), при этом должен быть известен пеленг ВСЛ в направлении от радиомаяка, и когда указатель индикатора курсовых отклонений установится на нуль, индикатор должен показывать "ОТ" маяка PMA/VOR (DVOR).
При проверке направления вращения стрелки индикатора курсовых отклонений в орбитальном полете против часовой стрелки значения радиальных пеленгов на индикаторе курсовых отклонений уменьшаются, а при полете по часовой стрелке - увеличиваются (для радиомаяка PMA/VOR (DVOR).
После орбитальных полетов выполняются полеты ВСЛ по обслуживаемым воздушным трассам (коридорам) с целью проверки точностных характеристик радиомаяка на этих трассах.
При периодических летных проверках рекомендуется проверять параметры и характеристики радиомаяков на тех воздушных трассах (коридорах), на которых выявлена наибольшая ошибка информации об азимуте/пеленге при полете ВСЛ по орбите.
Перечень требований ИКАО к летной проверке азимутально-дальномерных радиомаяков ближней навигации приведен в приложении N 4, а формы отчета о летной проверке радиомаяков - в приложении N 6.
41. Ошибка информации о пеленге в опорной контрольной точке радиомаяка PMA/VOR (DVOR) определяется только при вводе радиомаяка в эксплуатацию. Выбор опорной контрольной точки производится перед проведением летной проверки и выполняется совместно БО АЛК (штурманом ВСЛ), штурманской службой аэродрома/аэроузла и инженерно-техническим персоналом организации, на эксплуатации которой находится данный радиомаяк.
Контрольная точка выбирается на радиале установки антенны контрольного устройства или достаточно близко к нему (обычно 90° или 270°) и на расстоянии 18,5-37,0 км (10,0-20,0 м. миль) от АФУ радиомаяка. При этом контрольная точка (мост, перекресток дорог, церковь и т.п.) хорошо просматривается с высоты полета ВСЛ, равной 400-1000 м (1500-3000 фут), азимут/пеленг ее рассчитан с точностью до десятых долей градуса, указано расстояние от PMA/VOR и рекомендована высота прохода ВСЛ над ней относительно АФУ радиомаяка.
Контрольная точка используется для юстировки линии курса и служит в качестве опорной точки при последующих проверках юстировки контрольных устройств, курсовой чувствительности, а также при измерениях показателей модуляции сигналов радиомаяка.
Регулировка юстировки линии курса и курсовой чувствительности радиомаяка выполняется относительно этой опорной контрольной точки. При регулировках, выполняемых по другим направлениям, необходимо произвести повторную проверку указанных параметров PMA/VOR в этой контрольной точке.
Погрешность юстировки линии курса, измеренная в опорной контрольной точке, записывается в формуляр радиомаяка PMA/VOR для использования при последующих проверках.
АЛК работает в режиме определения ошибки пеленга в контрольной точке в соответствии с РЭ АЛК.
Пилотирование осуществляется по выбранному радиалу в направлении "НА" и "ОТ" радиомаяка на высоте полета 460-1000 м (1500-3000 фут), но не ниже безопасной, с проходом ВСЛ точно над опорной контрольной точкой, момент прохода ВСЛ над выбранной точкой определяется в соответствии с РЭ АЛК.
В момент прохода ВСЛ над опорной контрольной точкой измеряется пеленг PMA/VOR и в зависимости от типа АЛК рассчитывается среднее значение ошибки пеленга, которое составляет не более ![]() 1,5°.
1,5°.
42. Проверка пригодной для эксплуатационного использования области обслуживаемого воздушного пространства, где радиомаяк излучает такие сигналы, которые обеспечивают удовлетворительную работу типового бортового оборудования на эшелонах и расстояниях до угла места, равного 40° (далее - зона действия радиомаяка в горизонтальной и вертикальной плоскостях), осуществляется при полетах ВСЛ по воздушным трассам на высоте 5700-6000 м (9000-11000 м) в направлениях "ОТ" радиомаяка до удалений 250-300 км (135-165 м. миль) и "НА" радиомаяк с постоянной скоростью и точным проходом ВСЛ над радиомаяком.
Границы зоны действия радиомаяка в горизонтальной и вертикальной плоскостях по каналам азимута/пеленга и/или дальности определяются во время проведения летной проверки. Одновременно выполняется оценка сигнала опознавания и непрерывность навигационной информации.
АЛК работает в режиме определения зоны действия радиомаяка (PMA/VOR (DVOR), РМД/DME или РСБН) в соответствии с РЭ АЛК.
Измерения проводятся при маневрировании ВСЛ:
"ОТ" радиомаяка с удаления 6-7 км (3,5 м. мили) от АФУ радиомаяка до момента исчезновения информации об азимуте/пеленге и/или дальности;
"НА" радиомаяк с удаления 280 км (150 м. миль) от АФУ радиомаяка и с проходом над ним до удаления, равного 1,5Н полета.
В процессе проверки измеряются:
текущие значения азимута/пеленга (Ai/Пi) и/или наклонной дальности (Дi), по которым оценивается непрерывность навигационной информации;
дальность действия по уровню сигнала 90,0 мкВ/м и 5,0 мкВ/м на входе навигационного приемника для PMA/VOR или по появлению (исчезновению) сигнала готовности азимута и/или дальности для РСБН, РМД/DME;
текущие значения напряженности электромагнитного поля PMA/VOR.
Зона действия радиомаяка PMA/VOR зависит не только от уровня его сигнала, но и от других факторов. В тех районах, где отклонения типа неровностей и зубчатости, искривления, юстировка и/или помехи превышают установленные допуски и делают радиомаяк непригодным для эксплуатационного использования, вводятся ограничения, которые отражаются в отчете по летной проверке и аэронавигационных документах.
В процессе полета на борту ВСЛ прослушивается кодированный сигнал опознавания, оценивается правильность присвоенного кода и качество слышимости.
Опознавание считается удовлетворительным, если кодовые знаки правильны, ясно различимы и передаются с надлежащими интервалами.
Кроме того, для радиомаяков типа PMA/VOR определяется точность юстировки и вычисляется величина амплитуды искривлений курсовой линии.
АЛК работает в режиме определения величины искривлений курсовой линии радиомаяка PMA/VOR (DVOR) в соответствии с РЭ АЛК.
Искривления курсовой линии PMA/VOR определяются при полете ВСЛ по радиалам. В процессе полета регистрируется курс ВС и сравнивается с данными точной системы определения местоположения ВС в пространстве (ГЛОНАСС/GPS). Величина искривления курсовой линии определяется относительно правильного магнитного азимута (радиала).
Искривления курсовой линии, а также отклонения типа неровностей и зубчатости проявляются в виде колебаний указателя индикатора курсовых отклонений. Искривления курсовой линии подобны отклонениям типа зубчатости, но отличаются по частоте. Их частота такова, что ВС может следовать за этими искривлениями, если указатель индикатора курсовых отклонений удерживать в центре шкалы навигационного прибора.
При анализе искривлений курсовой линии необходимо учитывать изменения курса ВС и отклонения юстировки радиалов азимутального радиомаяка PMA/VOR. В некоторых случаях искривления трудно распознать, особенно в тех местах, где отсутствуют точные наземные ориентиры (контрольные точки) или другие средства точного определения местоположения ВС.
Вызванные искривлениями отклонения линии курса радиомаяка PMA/VOR (DVOR) относительно вычисленной средней линии курса (юстировки) составляют не более ![]() 3,5°.
3,5°.
Все виды искажений курсовой линии вызываются отражениями радиочастотных сигналов от местных предметов, ангаров, зданий, линий электропередачи, и т.д. Характер отклонения курсовой линии может свидетельствовать о типе отражающих объектов. Неровные объекты, такие как деревья, могут стать причиной возникновения неустойчивости линии курса, а объекты правильной формы - ангары и линии электропередачи - могут вызвать появление колебаний и искривления линии курса. Анализ результатов летной проверки и изучение окружающей местности позволяют обнаружить источник искажений курсовой линии и принять соответствующие меры. Эти искажения (неустойчивость, колебания и искривления курсовой линии) могут появляться как отдельно, так и в любом сочетании.
43. Ошибка навигационной информации об азимуте/пеленге и/или дальности радиомаяка на борту ВС определяется при маневрировании ВСЛ по:
орбите на высоте 700-1000 м (2000-3000 фут), но не ниже безопасной, при вводе радиомаяка в эксплуатацию по трем орбитам радиусами: 20 км (10 м. миль), 30 км (15 м. миль) и 40 км (20 м. миль), при периодической проверке по одной орбите радиусом 30 км (15,0 м. миль), от места установки АФУ радиомаяка с левым (правым), затем с правым (левым) креном ВСЛ;
воздушным трассам на высоте 5700-6000 м (18000-20000 фут) или 9000-11000 м (30000-36000 фут) в направлениях "ОТ" и "НА" радиомаяк с постоянной скоростью полета;
а) при маневрировании ВСЛ по орбите АЛК работает в режиме определения ошибки информации об азимуте/пеленге и/или дальности (![]() А/
А/![]() П,
П, ![]() Д) в зависимости от типа проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Д) в зависимости от типа проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Измерения проводятся при наличии информации об азимуте/пеленге и/или дальности и выполняются в любой точке маневрирования ВСЛ по орбите и заканчиваются в точке начала измерений после завершения полета ВСЛ по этой траектории.
В процессе маневрирования ВСЛ измеряются текущие значения азимута/пеленга (Ai/Пi) и/или наклонной дальности (Дi) проверяемых радиомаяков, азимута (Аснci) и дальности (Дснсi) от спутниковой навигационной системы (СНС), вычисляются ошибки определения азимута/пеленга и/или дальности с учетом систематической (![]() А/
А/![]() П,
П, ![]() Д) и случайной (
Д) и случайной (![]() ) составляющих погрешности радиомаяка в соответствии с руководством по эксплуатации применяемого типа АЛК.
) составляющих погрешности радиомаяка в соответствии с руководством по эксплуатации применяемого типа АЛК.
Полученные значения систематической (постоянной) и случайной (переменной) составляющих ошибки информации об азимуте/пеленге (![]() А/
А/![]() П) при маневрировании ВСЛ по орбите используются для регулировки радиомаяка с целью исключения систематической ошибки и определения воздушных трасс, на которых эта ошибка достигает максимальной величины или превышает допустимые значения.
П) при маневрировании ВСЛ по орбите используются для регулировки радиомаяка с целью исключения систематической ошибки и определения воздушных трасс, на которых эта ошибка достигает максимальной величины или превышает допустимые значения.
При невозможности выполнения полетов по орбите из-за топографических условий местности, наличия специальных зон и по другим объективным причинам летная проверка точностных характеристик азимутально-дальномерных радиомаяков (PMA/VOR, РМД/DME, РСБН) проводится по наземным контрольным ориентирам. Контрольные ориентиры (КО) выбираются в районе воздушных трасс (коридоров) на расстоянии 30-60 км от АФУ радиомаяка. Маневрирование ВСЛ осуществляется на высоте, равной 400 м - 1000 м, с проходом над КО (мост, перекресток дорог, церковь, водонапорная башня и т.п.).
Схема маневрирования ВСЛ при проверке точностных характеристик азимутально-дальномерных радиомаяков по контрольным ориентирам приведена на рисунке 15 приложения N 1.
При полетах ВСЛ по контрольным ориентирам АЛК работает в режиме определения ошибки информации об азимуте/пеленге и/или дальности (![]() А/
А/![]() П,
П, ![]() Д) в зависимости от типа проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Д) в зависимости от типа проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Воздушное судно-лаборатория выводится на выбранный контрольный ориентир на высоте, при которой сохраняется информация об азимуте/пеленге и/или дальности. В момент точного прохода ВСЛ над ориентиром БО АЛК фиксирует это событие на регистрирующей аппаратуре, считывает показания азимута/пеленга (А/П) и/или наклонной дальности (Д) проверяемых радиомаяков, а также по радиосвязи командой "ОТСЧЕТ" информирует ИТП радиомаяка РСБН для считывания показаний азимута и дальности на экране индикатора.
Определение ошибки навигационной информации об азимуте/пеленге и/или наклонной дальности азимутально-дальномерного радиомаяка с использованием полуавтоматической аппаратуры летного контроля приведено в приложении N 5;
б) при полетах ВСЛ по воздушным трассам АЛК работает в режиме определения ошибки информации об азимуте/пеленге и/или дальности (![]() А/
А/![]() П,
П, ![]() Д) в зависимости от проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Д) в зависимости от проверяемого радиомаяка (PMA/VOR, РМД/DME, РСБН) в соответствии с РЭ АЛК.
Измерения проводятся при наличии навигационной информации об азимуте/пеленге и/или дальности на борту ВСЛ и завершаются при исчезновении этой информации.
В процессе полета измеряются текущие значения азимута/пеленга (Ai/Пi) и/или наклонной дальности (Дi) проверяемых радиомаяков, азимута (Acнci) и дальности (Дснсi) от СНС, вычисляются ошибки определения азимута/пеленга и/или дальности с учетом систематической (![]() А/
А/![]() П,
П, ![]() Д) и случайной (
Д) и случайной (![]() ) составляющих погрешности радиомаяка в соответствии с РЭ АЛК.
) составляющих погрешности радиомаяка в соответствии с РЭ АЛК.
44. Ошибка навигационной информации о наклонной дальности на борту ВС и зона действия дальномерного навигационно-посадочного радиомаяка РМД-НП/DME-N определяются при маневрировании ВСЛ по схеме захода на посадку в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов). Эту проверку рекомендуется проводить в комплексе с проверкой зоны действия курсового радиомаяка PMC/ILS в соответствии с пунктами 19 и 20. В процессе проверки определяются:
удаления, на которых показания дальности до порога ВПП на соответствующих приборах становятся устойчивыми;
удаления, на которых показания дальности по мере приближения к порогу ВПП на соответствующих приборах становятся неустойчивыми;
точность информации о дальности до порога ВПП в момент прохода ВСЛ характерных точек на траектории снижения (ДПРМ, БПРМ, ВнМРМ, порога ВПП).
Зона действия дальномерного радиомаяка РМД-НП/DME-N составляет:
по дальности не менее 50 км (25 м. миль) на высоте 600 м (2000 фут);
в горизонтальной плоскости (по азимуту) круговая или секторная ![]() 35° относительно оси ВПП;
35° относительно оси ВПП;
в вертикальной плоскости (угол места) от 0 до 20°.
Погрешность, вносимая радиомаяком в измерение дальности до порога ВПП, не более ![]() 75,0 м (
75,0 м (![]() 0,5 мкс).
0,5 мкс).
45. Проверка отклонения линии курса в результате наличия нежелательных вертикально-поляризованных составляющих сигналов радиомаяка на качество пилотирования ВС (далее - влияние вертикальной составляющей поляризации поля PMA/VOR - ВСП) выполняется только при вводе PMA/VOR (DVOR) в эксплуатацию.
Излучение радиомаяка PMA/VOR(DVOR) является поляризованным в горизонтальной плоскости. Влияние поляризации электромагнитного поля является результатом воздействия "паразитной" радиочастотной составляющей с вертикальной поляризацией (ВСП), излучаемой АФУ PMA/VOR (DVOR).
Для определения присутствия этого нежелательного явления существует несколько типовых схем пилотирования ВСЛ, которые выбираются исходя из технических характеристик АЛК:
полет с периодическими кренами ВСЛ на ![]() 20°;
20°;
полет ВСЛ по орбите с креном 30°;
полет ВСЛ по восьми линиям пути над наземной контрольной точкой;
а) при наличии в комплекте АЛК устройства, позволяющего устанавливать углы наклона плоскости поляризации курсо-навигационной антенны (КНА), для оценки влияния вертикальной составляющей поляризации поля осуществляется маневрирование ВСЛ по радиалу в направлении "НА" радиомаяк или "ОТ" него на расстоянии до 40 км (20 м. миль) от АФУ PMA/VOR на высоте 1000-1500 м (3300-5000 фут), но не ниже безопасной, при этом углы крена ВСЛ не превышают ![]() 5°.
5°.
Местоположение ВСЛ на траектории измерений контролируется с помощью точной системы определения координат ВС (СНС - ГЛОНАСС/GPS и т.п.).
АЛК работает в режиме определения ВСП PMA/VOR (DVOR) в соответствии с РЭ АЛК.
Измерения выполняются на расстоянии 9-40 км (5-20 м. миль) от АФУ радиомаяка PMA/VOR.
Один комплект курсо-навигационного приемника АЛК подключается на выход антенны с нормальной плоскостью поляризации, второй комплект работает от антенны с наклоном плоскости поляризации, равной ![]() 45° (
45° (![]()
![]() - величина углов наклона плоскости поляризации КНА, приведенная в протоколе калибровки АЛК).
- величина углов наклона плоскости поляризации КНА, приведенная в протоколе калибровки АЛК).
Выполняются два захода ВСЛ: один при наклоне плоскости поляризации КНА, равной +45° (+![]() ), второй при -45° (-
), второй при -45° (-![]() ). В процессе маневрирования ВСЛ измеряются текущие значения выходных токов: первого приемника с нормально расположенной антенной (Ii-1) и второго приемника (Ii+2 и Ii-2) с плоскостью поляризации антенны, равной
). В процессе маневрирования ВСЛ измеряются текущие значения выходных токов: первого приемника с нормально расположенной антенной (Ii-1) и второго приемника (Ii+2 и Ii-2) с плоскостью поляризации антенны, равной ![]() 45° (
45° (![]()
![]() ), пропорциональные влиянию вертикальной составляющей поляризации поля PMA/VOR.
), пропорциональные влиянию вертикальной составляющей поляризации поля PMA/VOR.
Экспресс-анализ ВСП выполняется следующим образом:
в момент, когда значения тока первого навигационного приемника (Ii-1) равняются "0", измеряется текущее значение тока второго приемника (Ii+2 и Ii-2) при его работе на антенну с наклоном плоскости поляризации +45° (+![]() ) и -45° (-
) и -45° (-![]() ). Далее вычисляется среднеарифметическое значение токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации, равной +45° (+
). Далее вычисляется среднеарифметическое значение токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации, равной +45° (+![]() ) и -45° (-
) и -45° (-![]() ), и определяется разность значений этих токов по формуле:
), и определяется разность значений этих токов по формуле:
![]() где
где
![]() - разность значений токов при работе навигационного приемника на антенну с наклоном плоскости поляризации (+
- разность значений токов при работе навигационного приемника на антенну с наклоном плоскости поляризации (+![]() и -
и -![]() ), мкА;
), мкА;
Icp (+![]() ) и Icp (-
) и Icp (-![]() ) - среднеарифметические значения токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации (+
) - среднеарифметические значения токов второго комплекта приемника (Icp) при его работе на антенну с наклоном плоскости поляризации (+![]() и -
и -![]() ), мкА.
), мкА.
Величина тока, обусловленная наличием ВСП, приведенная к крену BCЛ, равному ![]() 20°, и бортовой антенне с подавлением уровня ВСП 10 дБ (17,5°), вычисляется по формуле:
20°, и бортовой антенне с подавлением уровня ВСП 10 дБ (17,5°), вычисляется по формуле:
![]() где
где
![]() - величина тока ВСП, приведенная к крену ВС
- величина тока ВСП, приведенная к крену ВС ![]() 20° и бортовой антенне с подавлением уровня ВСП, равным 10дБ, мкА;
20° и бортовой антенне с подавлением уровня ВСП, равным 10дБ, мкА;
+![]() и -
и -![]() - углы наклона плоскости поляризации вправо и влево бортовой измерительной антенны ВСЛ (из протокола калибровки АЛК), градус;
- углы наклона плоскости поляризации вправо и влево бортовой измерительной антенны ВСЛ (из протокола калибровки АЛК), градус;
![]() l - разность значений токов бортового навигационного приемника, измеренных при наклонах плоскости поляризации антенны на угол
l - разность значений токов бортового навигационного приемника, измеренных при наклонах плоскости поляризации антенны на угол ![]()
![]() , мкА;
, мкА;
коэффициент 0,452 = tg (20° +17,5°) - tg 17,5°.
По результатам измерений в соответствии с РЭ АЛК и исходя из ее технических характеристик вычисляется величина влияния вертикальной составляющей поляризации поля PMA/VOR (DVOR), приведенная для кренов ВСЛ, равных ![]() 20°, которая составляет не более
20°, которая составляет не более ![]() 2,0°;
2,0°;
б) при отсутствии в комплекте АЛК устройства, позволяющего устанавливать углы наклона плоскости поляризации КНА, оценка влияния вертикальной составляющей поляризации поля радиомаяка проводится по эффекту "углового положения" с периодическими кренами ВСЛ на ![]() 20°.
20°.
АЛК работает в режиме определения ВСП PMA/VOR (DVOR) в соответствии с РЭ АЛК.
Маневрирование ВСЛ осуществляется по радиалу в направлении "НА" радиомаяк или "ОТ" него на расстоянии до 50,0 км (25,0 м. миль) от АФУ PMA/VOR на высоте 1000-1500 м (3300-5000 фут), но не ниже безопасной, при этом ввод ВСЛ в крен ![]() 20° и возврат его в исходное положение - нулевого крена выполняется за время не более 5 секунд.
20° и возврат его в исходное положение - нулевого крена выполняется за время не более 5 секунд.
Периодические крены ВСЛ на ![]() 20° относительно продольной оси самолета выполняются вначале в одну сторону с креном, равным +20°, и с последующим возвращением к прямолинейному горизонтальному полету, а затем с креном, равным -20°, в противоположную сторону, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюции ВСЛ отклонения курса и линии пути от заданных значений поддерживаются минимальными (указатель индикатора курсовых отклонений в центре шкалы).
20° относительно продольной оси самолета выполняются вначале в одну сторону с креном, равным +20°, и с последующим возвращением к прямолинейному горизонтальному полету, а затем с креном, равным -20°, в противоположную сторону, и этот маневр необходимо повторить не менее 20 раз в каждую сторону. В процессе указанных эволюции ВСЛ отклонения курса и линии пути от заданных значений поддерживаются минимальными (указатель индикатора курсовых отклонений в центре шкалы).
Измеренное по записи на бортовом регистраторе параметров АЛК отклонение курса указывает на наличие ВСП.
Местоположение ВСЛ на траектории измерений контролируется с помощью точной системы определения координат ВС (СНС - ГЛОНАСС/GPS и т.п.).
При выполнении этих полетов одновременно проводится оценка искривлений пеленга радиомаяка при полете с кренами и без них, а также вычисляется вертикальная составляющая поляризации PMA/VOR.
Ошибка навигационной информации о пеленге радиомаяка PMA/VOR (DVOR) составляет не более ![]() 2,0°.
2,0°.
При выполнении кренов воздушное судно-лаборатория может отклониться от заданной траектории полета, на которой проводятся измерения, поэтому необходимо постоянно контролировать полет ВСЛ по заданному радиалу.
46. Проверка курсовой чувствительности радиомаяка PMA/VOR проводится на границе зоны действия радиомаяка и выполняется в комплексе с полетами ВСЛ по определению зоны действия радиомаяка в соответствии с пунктом 42.
АЛК работает в режиме определения курсовой чувствительности в соответствии с РЭ АЛК. Выполняется калибровка тракта измерения азимута/пеленга второго (первого) комплекта бортовой курсо-навигационной аппаратуры PMA/VOR исходя из выполнения неравенства: П![]() < П < П
< П < П![]() . В бортовом журнале фиксируется величина выходного тока курсового приемника на втором (первом) микроамперметре (I
. В бортовом журнале фиксируется величина выходного тока курсового приемника на втором (первом) микроамперметре (I![]() и I
и I![]() ) блока контроля выходных токов (БКВТ).
) блока контроля выходных токов (БКВТ).
Маневрирование ВСЛ выполняется по воздушным трассам на высоте 5700-6000 м (18000-20000 фут) или 9000-11000 м (30000-36000 фут) в направлениях "ОТ" радиомаяка до удалений 250-300 км (135-165 м. миль) и "НА" радиомаяк с постоянной скоростью и выдерживанием указателя курсовых отклонений в пределах центрального кружка индикатора курса. Крены ВСЛ при этих полетах не превышают ![]() 5°.
5°.
Пилотирование ВСЛ осуществляется по показаниям первого (второго) комплекта бортовой курсо-навигационной аппаратуры PMA/VOR. На селекторе курса второго (первого) комплекта аппаратуры устанавливается значение пеленга, отличное на +10° от заданного, соответствующего выбранному радиалу, измеряется текущее значение пеленга (Пi![]() ) второго (первого) комплекта бортовой аппаратуры PMA/VOR, азимута (Ai
) второго (первого) комплекта бортовой аппаратуры PMA/VOR, азимута (Ai![]() ), фиксируется ток I
), фиксируется ток I![]() , затем на селекторе курса второго (первого) комплекта аппаратуры устанавливается значение пеленга, отличное на -10° от заданного, аналогично измеряется текущее значение пеленга (Пi-) второго (первого) комплекта бортовой курсо-навигационной аппаратуры PMA/VOR, азимута (Ai-), фиксируется ток I
, затем на селекторе курса второго (первого) комплекта аппаратуры устанавливается значение пеленга, отличное на -10° от заданного, аналогично измеряется текущее значение пеленга (Пi-) второго (первого) комплекта бортовой курсо-навигационной аппаратуры PMA/VOR, азимута (Ai-), фиксируется ток I![]()
Курсовая чувствительность радиомаяка (![]() ) вычисляется по формуле:
) вычисляется по формуле:
![]() .
.
Величина курсовой чувствительности радиомаяка находится в пределах 20,0 ![]() 2,0°.
2,0°.
Курсовая чувствительность радиомаяка может быть определена по другой методике, в зависимости от технических возможностей применяемой аппаратуры летного контроля.
47. Радиалы, которые используются или намечаются для использования при заходе ВС на посадку, подвергаются летной проверке с целью определения их пригодности для выполнения ВС предпосадочного маневра с использованием навигационной информации от азимутального радиомаяка PMA/VOR (DVOR). После проведения летной проверки PMA/VOR (DVOR) по программе ввода в эксплуатацию или периодической летной проверки радиомаяков в соответствии с требованиями пунктов 42-45 дополнительно выполняется проверка радиалов в зоне взлета и посадки.
Пилотирование ВСЛ осуществляется по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с использованием сигналов PMA/VOR по посадочному радиалу в направлении "НА" радиомаяк и выходом в точку начала измерений на дальности 12-18 км от АФУ PMA/VOR (DVOR), последующим снижением по глиссаде и уходом на второй круг.
Полет ВСЛ выполняется по посадочному радиалу с точным выдерживанием указателя индикатора курсовых отклонений в центре шкалы навигационного прибора. Точка минимальной высоты снижения ВС рассчитывается в зависимости от места установки радиомаяка PMA/VOR и угла наклона глиссады на каждом конкретном аэродроме. В процессе полета на борту ВСЛ измеряются текущие значения азимута/пеленга (Аi/Пi), азимута (Аснсi) от СПС (ГЛОНАСС/GPS), вычисляются ошибки определения азимута/пеленга с учетом систематической (![]() ) и случайной (
) и случайной (![]() ) составляющих погрешности радиомаяка в соответствии с РЭ данного типа АЛК по методике, приведенной в пункте 43 настоящего раздела, при полетах ВСЛ по трассе. В момент пересечения ВСЛ заданного посадочного радиала (определяется по данным аппаратуры ГЛОНАСС/GPS) БО АЛК по команде штурмана "СЧЕТ" фиксирует показания величины тока микроамперметра прибора БКВТ (Ii) и моменты пропадания и появления сигналов PMA/VOR (DVOR). Далее по результатам захода ВСЛ строится график зависимости ошибки определения пеленга (
) составляющих погрешности радиомаяка в соответствии с РЭ данного типа АЛК по методике, приведенной в пункте 43 настоящего раздела, при полетах ВСЛ по трассе. В момент пересечения ВСЛ заданного посадочного радиала (определяется по данным аппаратуры ГЛОНАСС/GPS) БО АЛК по команде штурмана "СЧЕТ" фиксирует показания величины тока микроамперметра прибора БКВТ (Ii) и моменты пропадания и появления сигналов PMA/VOR (DVOR). Далее по результатам захода ВСЛ строится график зависимости ошибки определения пеленга (![]() Пi) от дальности (Д):
Пi) от дальности (Д):![]() Пi = f(Д).
Пi = f(Д).
Проверенный таким образом посадочный радиал обеспечивает нахождение ВС в зоне посадки, кроме того, в точке минимальной высоты снижения ВС находится в пределах ![]() 30 м по боковому отклонению от продолжения осевой линии ВПП. На протяжении всего захода ВСЛ по посадочному радиалу пропадания сигналов PMA/VOR недопустимы.
30 м по боковому отклонению от продолжения осевой линии ВПП. На протяжении всего захода ВСЛ по посадочному радиалу пропадания сигналов PMA/VOR недопустимы.
При выполнении этих условий радиомаяк может использоваться как вспомогательное средство для захода ВС на посадку. В этом случае в акте летной проверки, в разделе "заключение" отмечается, что радиомаяк PMA/VOR (DVOR) пригоден для использования при заходе ВС на посадку с указанием конкретной высоты снижения, и к акту летной проверки прилагается график ![]() Пi = f(Д) с указанием границ зоны взлета и посадки ВС для данного направления посадки аэродрома.
Пi = f(Д) с указанием границ зоны взлета и посадки ВС для данного направления посадки аэродрома.
Периодичность летных проверок PMA/VOR (DVOR), используемых как вспомогательное средство для захода ВС на посадку (для неточного захода на посадку), соответствует периодичности летных проверок радиомаяков PMA/VOR и проводится в комплексе с проверкой азимутального радиомаяка.
48. Радиалы, которые используются или намечаются для использования по правилам полетов по приборам (ППП/IАР), подвергаются летной проверке с целью определения их пригодности для выполнения ВС схем полета по приборам (ППП/IАР). При проверках, проводимых при вводе радиомаяка PMA/VOR (DVOR) в эксплуатацию, проверяются все радиалы, которые намечаются для использования при полетах по приборам. Выбор радиалов, подлежащих летной проверке, производится на основе следующих критериев:
отбираются все радиалы, обеспечивающие выполнение ВС схем захода на посадку по приборам;
в тех случаях, когда это целесообразно, в каждом квадранте выбирается по меньшей мере один радиал. Как правило, выбирают самые протяженные и самые низкие радиалы.
Маршрутные радиалы (трассы, внетрассовые и запасные маршруты) проверяются при полетах ВСЛ "НА" радиомаяк или "ОТ" него по всей их длине от АФУ радиомаяка до дальности их предполагаемого использования. Полет выполняется на минимальной высоте, опубликованной для данной трассы или маршрута. При проверке аэродромных радиомаяков PMA/VOR минимальная высота полета по маршрутному радиалу над самой высокой точкой местности или над самым высоким препятствием под радиалом должна составлять 300 м (1000 фут) вплоть до удаления, равного 46,3 км (25 м. миль). Пилотирование ВСЛ осуществляется с точным выдерживанием его на электронном радиале, а местоположение ВСЛ записывается на регистрирующей аппратуре по данным точной системы определения местоположения ВС (ГЛОНАСС/GPS).
На каждой трассе и каждом прямом трассовом радиале при вводе PMA/VOR в эксплуатацию необходимо проверять уровни модуляции опорным сигналом, сигналом с изменяющейся фазой и сигналом с частотой 9960 Гц, а также влияние вертикальной поляризации. На протяжении всего полета ВСЛ по радиалу необходимо записывать уровень сигнала (напряженность поля - Е![]() ), отклонения от линии курса и точное местоположение ВСЛ.
), отклонения от линии курса и точное местоположение ВСЛ.
Структура курса (искривления линии курса) и юстировка определяются на основе анализа записей полетной информации на регистрирующей аппаратуре АЛК. Одновременно записи полетной информации анализируются с точки зрения возможного нежелательного ухудшения параметров и характеристик при полете в непосредственной близости от радиомаяка или над ним, чтобы установить отсутствие неблагоприятного влияния при использовании радиомаяка для обеспечения заходов на посадку, выполнения полетов в зоне ожидания и т.д.
Аэродромные радиалы (подход, уход на второй круг, стандартные схемы вылета по приборам) проверяются в процессе проверок при вводе средств радиотехнического обеспечения полетов в эксплуатацию, и их оценка производится на достаточном расстоянии, чтобы проверить параметры и характеристики средства в районе стандартного разворота, на схеме полета в зоне ожидания и схеме ухода на второй круг. Полет ВСЛ по радиалу подхода выполняется на высоте на 30 м (100 фут) ниже предписанных высот. При летных проверках, связанных с оценкой места размещения радиомаяка и вводом его в эксплуатацию, выполняется проверка двух дополнительных радиалов, расположенных симметрично через 5,0° с каждой стороны радиала подхода, которые анализируются по тем же критериям, что и радиал подхода. Радиалы, используемые для обеспечения схем стандартного маршрута вылета по приборам (SID), оцениваются по дальности, до которой они применяются.
49. Смежные радиомаяки, которые обеспечивают формирование пересечений диаграмм направленности (далее - точки пересечения сигналов радиомаяков PMA/VOR (DVOR), необходимо проверять с целью определения их пригодности для выполнения полетов ВС в воздушном пространстве установленных размеров, расположенном, как правило, над радионавигационной точкой аэродрома (района аэродрома/аэроузла), предназначенном для ожидания ВС своей очереди захода на посадку или подхода к аэродрому (далее - зона ожидания). На радиале (радиалах), образующем пересечение сигналов радиомаяков, в пределах 7,4 км (4,0 м. мили) или 4,5°, в зависимости от того, что больше, с каждой стороны географического положения контрольной точки пересечения необходимо обеспечить по крайней мере минимальный уровень сигнала достаточный для использования ВС навигационной информации от этих радиомаяков.
Летная проверка подтверждает, что сигналы опознавания каждого из радиомаяков, формирующих пересечение диаграмм направленности, четкие и различимые, а речевые сообщения на минимальной абсолютной высоте полета в зоне ожидания - ясные и разборчивые, а также на всех высотах ниже утвержденной максимальной абсолютной высоты в зоне ожидания сигналы каждого из радиомаяков свободны от помех. Для пересечения сигналов радиомаяков устанавливают минимальную высоту приема сигнала, которая определяется радиомаяком PMA/VOR (DVOR), формирующим самый слабый сигнал.
IV. Методики летных проверок параметров и характеристик
радионавигационных средств обеспечения полетов ВС: ОСП, ОПРС/NDB, АРП/VDF
50. Основными целями летной проверки оборудования системы посадки (далее - ОСП), состоящего из дальней (ДПРМ) и ближней (БПРМ) приводных радиостанций (далее - ПРС) с маркерными радиомаяками (МРМ) и предназначенного для привода воздушных судов, оснащенных соответствующим оборудованием (APК/ADF), в район аэродрома, выполнения предпосадочного маневра и захода на посадку, являются определение зоны действия ПРС, оценка качества сигнала опознавания, точности привода на аэродром и контроль помех от других радиостанций.
Маркерные радиомаяки на дальнем (ДПРМ) и ближнем (БПРМ) "приводах" могут быть использованы из комплекта РМС инструментального захода ВС на посадку при ее наличии на данном направлении посадки.
В тех случаях, когда МРМ входит в состав РМС инструментального захода ВС на посадку, его летная проверка проводится в комплексе с этой системой. В случаях, когда МРМ входит в состав ОСП, летная проверка МРМ проводится по программе оборудования системы посадки, объем проверки при этом идентичен.
При вводе ОСП в эксплуатацию проверяются первый и второй комплекты аппаратуры на основной и резервных частотах по всем основным обслуживаемым воздушным трассам.
Маневрирование ВСЛ осуществляется:
при полете по первой воздушной трассе "ОТ" ("НА") радиостанции проверяется первый комплект аппаратуры ПРС на основной (рабочей) частоте, а при полете ВСЛ "НА" ("ОТ") радиостанцию проверяется второй комплект аппаратуры на этой же частоте;
при полете по следующей воздушной трассе (втором полете ВСЛ) "ОТ" ("НА") радиостанции проверяется первый комплект аппаратуры ПРС на резервной частоте, а при полете ВСЛ "НА" ("ОТ") радиостанцию проверяется второй комплект аппаратуры на этой же (резервной) частоте;
при полете по очередной воздушной трассе (третьем полете ВСЛ) "ОТ" ("НА") радиостанции проверяется первый комплект аппаратуры ПРС на второй резервной частоте, а при полете ВСЛ "НА" ("ОТ") радиостанцию проверяется второй комплект аппаратуры на этой же (второй резервной) частоте.
На остальных воздушных трассах летная проверка ПРС проводится на основной (рабочей) частоте.
Периодические летные проверки параметров и характеристик ОСП проводятся не менее чем на двух воздушных трассах только на основной (рабочей) частоте (резервные частоты ПРС проверяются по наземным средствам контроля) для одного комплекта аппаратуры ПРС, последовательность включения аппаратуры в работу планируется таким образом, чтобы летные проверки каждого комплекта проводились поочередно.
Дальность до ПРС может определяться с помощью информационных сигналов от радиомаяков ближней навигации РМД/DME, РСБН и/или спутниковых систем ГЛОНАСС/GPS с помощью диспетчера УВД по экрану индикатора РЛС или визуально по карте.
Перечень требований ИКАО к летной проверке системы ОСП приведен в приложении N 4, а форма отчета о летной проверке ОСП - в приложении N 6.
51. Дальность действия приводной радиостанции (зона действия ПРС) определяется путем измерения напряженности электромагнитного поля ПРС (Е![]() - номинальная ЗД) или путем оценки качества (эффективная ЗД) таких показателей, как уровень сигналов (речевых и сигналов опознавания) и поведение указателя индикатора отклонений автоматического радиокомпаса (APК/ADF) на борту ВСЛ.
- номинальная ЗД) или путем оценки качества (эффективная ЗД) таких показателей, как уровень сигналов (речевых и сигналов опознавания) и поведение указателя индикатора отклонений автоматического радиокомпаса (APК/ADF) на борту ВСЛ.
Проверка зоны действия ПРС осуществляется при маневрировании ВСЛ по орбите с радиусом, равным номинальной зоне действия, на минимальной безопасной высоте исходя из конкретных условий аэродрома (аэроузла). Если в процессе орбитального полета в зоне действия будут выявлены области, в которых возникают определенные трудности по качеству сигналов ПРС, или рельеф местности окажется достаточно однородным, что сделает нецелесообразным выполнение кругового полета, то зону действия проверяют путем выполнения радиальных полетов "НА" и "ОТ" ПРС или полетов ВСЛ в наиболее характерных секторах воздушного пространства, используемых при маневрировании рейсовых ВС. Полет выполняется на минимально безопасной высоте исходя из конкретных условий аэродрома (аэроузла), по выбранной трассе "ОТ" и "НА" приводную радиостанцию для ДПРМ и БПРМ.
АЛК работает в режиме определения зоны действия ПРС в соответствии с РЭ аппаратуры летного контроля.
В процессе полета ВСЛ в направлении "ОТ" ПРС до максимальной дальности отслеживаются показания стрелок индикатора APК/ADF путем наблюдения за колебаниями стрелки и оценивается устойчивость этих показаний, когда колебания стрелок превышают ![]() 5°, определяется дальность ВСЛ от ПРС, до которой определяется зона действия ПРС.
5°, определяется дальность ВСЛ от ПРС, до которой определяется зона действия ПРС.
Индикатор APК/ADF указывает угол между продольной осью ВС и направлением на ПРС. При проведении летной проверки необходимо следить за тем, чтобы курс ВСЛ был как можно более стабильным, т.к. любое рыскание ВС по курсу будет вызывать колебания стрелки радиокомпаса.
В процессе полета ВСЛ в направлении "НА" ПРС визуально контролируются показания индикаторов APК/ADF и оценивается появление устойчивых показаний индикатора радиокомпаса, когда колебания стрелок не превышают величины ![]() 5°, и определяется дальность ВСЛ до ПРС, при которой показания индикатора APК/ADF стали соответствовать удовлетворительным значениям.
5°, и определяется дальность ВСЛ до ПРС, при которой показания индикатора APК/ADF стали соответствовать удовлетворительным значениям.
При наличии в составе датчиков сигналов аппаратуры летного контроля APК/ADF в процессе полета ВСЛ в направлении "ОТ" ПРС до максимальной дальности и в обратном направлении на регистрирующей аппаратуре АЛК фиксируется напряженность электромагнитного поля ПРС.
Зона действия приводной радиостанции составляет:
дальней ПРС - 150 км;
ближней ПРС - 50 км.
Во время проведения летной проверки приводной радиостанции контролируются кодированные сигналы опознавания. Сигналы опознавания считаются удовлетворительными, если кодовые символы правильные, четко прослушиваются и имеют соответствующие временные интервалы.
52. В процессе выполнения маневров ВСЛ при проверке параметров и характеристик ПРС проводится оценка возможности использования ОСП на аэродроме (полетопригодность ОСП). При этом визуально наблюдаются и оцениваются правильность, устойчивость и величина отклонений показаний указателя индикатора APК/ADF от выбранного посадочного курса. Фиксируются участки, на которых обнаружена неудовлетворительная работа ПРС (колебания стрелки указателя отклонений APК/ADF и отклонения ее от значения курса посадки, превышающие ![]() 5°). Полетопригодность ПРС оценивается в соответствии с аэронавигационным паспортом аэродрома (инструкцией по производству полетов) в зоне ожидания и на схеме захода на посадку, которая является типовой для данного аэродрома с использованием проверяемой системы ОСП.
5°). Полетопригодность ПРС оценивается в соответствии с аэронавигационным паспортом аэродрома (инструкцией по производству полетов) в зоне ожидания и на схеме захода на посадку, которая является типовой для данного аэродрома с использованием проверяемой системы ОСП.
53. Основной целью летной проверки МРМ системы ОСП является оценка соответствия зоны действия радиомаркера, определенной путем измерения уровня напряженности электромагнитного поля (Ем), излучаемого АФУ МРМ и путем визуальной индикации, требуемым эксплуатационным допускам.
При вводе в эксплуатацию проверяются первый и второй комплекты аппаратуры радиомаяка. При периодических проверках комплекты аппаратуры МРМ проверяются поочередно.
При периодических летных проверках величину зоны действия МРМ (![]() D) допускается проверять путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) радиомаркера и истинной воздушной скорости полета ВС, по формуле:
D) допускается проверять путем измерения промежутка времени, на протяжении которого обеспечивается визуальная индикация (звуковая сигнализация) радиомаркера и истинной воздушной скорости полета ВС, по формуле:
![]() где
где
![]() D - ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
D - ЗД МРМ (ширина диаграммы направленности радиомаркера), м;
![]() и
и ![]() - истинная воздушная скорость ВСЛ при полете над МРМ с одного и противоположного направлений полета, м/с;
- истинная воздушная скорость ВСЛ при полете над МРМ с одного и противоположного направлений полета, м/с;
![]() и
и ![]() - продолжительность визуальной индикации (звуковой сигнализации) маркера при полете ВСЛ над МРМ с одного и противоположного направлений, с.
- продолжительность визуальной индикации (звуковой сигнализации) маркера при полете ВСЛ над МРМ с одного и противоположного направлений, с.
При периодических летных проверках, выполняемых экипажем ВСЛ, определение параметров и характеристик маркерного радиомаяка, входящего в состав системы ОСП (ДМРМ, БМРМ, ВнМРМ), проводится в соответствии с требованиями, приведенными в пункте 36.
54. Основными целями летной проверки отдельной приводной радиостанции (далее - ОПРС/NDB), работающей на низких и средних частотах, излучающей в пространство ненаправленные сигналы, распространяющиеся главным образом в виде поверхностной волны, с помощью которых пилот определяет пеленг на эту радиостанцию и осуществляет "привод" на нее, являются: определение зоны действия, качества принимаемого сигнала, контроль помех от других радиостанций и точности функционирования приводной радиостанции.
При проведении летной проверки выбираются наиболее важные области обслуживания воздушного пространства (воздушные трассы), которые охватывает зона действия ОПРС/NDB, по результатам летных измерений в этих областях дается оценка эксплуатационных характеристик данной приводной радиостанции.
Зона действия ОПРС/NDB определяется путем измерения напряженности электромагнитного поля (Е![]() - номинальная ЗД ПРС) или путем регистрации колебаний указателя индикатора отклонений APК/ADF (эффективная ЗД ПРС) в соответствии с пунктом 51 и техническими характеристиками АЛК.
- номинальная ЗД ПРС) или путем регистрации колебаний указателя индикатора отклонений APК/ADF (эффективная ЗД ПРС) в соответствии с пунктом 51 и техническими характеристиками АЛК.
При вводе ОПРС/NDB в эксплуатацию проводится летная проверка первого и второго комплектов аппаратуры приводной радиостанции на рабочей и резервной частотах на всех основных воздушных трассах, которые обслуживает данная приводная радиостанция. Проверка выполняется при маневрировании ВСЛ на минимальной безопасной высоте исходя из конкретных условий аэродрома (аэроузла).
Маневрирование ВСЛ осуществляется:
при полете по первой воздушной трассе "ОТ" ("НА") радиостанции проверяется первый комплект аппаратуры ПРС на основной (рабочей) частоте, а при полете ВСЛ "НА" ("ОТ") радиостанцию проверяется второй комплект аппаратуры на этой же частоте;
при полете по следующей воздушной трассе (втором полете ВСЛ) "ОТ" ("НА") радиостанции проверяется первый комплект аппаратуры ПРС на резервной частоте, а при полете ВСЛ "НА" ("ОТ") радиостанцию проверяется второй комплект аппаратуры на этой же (резервной) частоте.
На остальных воздушных трассах летная проверка ПРС проводится на основной (рабочей) частоте.
В процессе летной проверки ОПРС/NDB контролируются передаваемые радиостанцией кодированные сигналы опознавания. Контроль осуществляется до границы зоны действия приводной радиостанции. Сигналы опознавания считаются удовлетворительными, если кодовые символы правильные, четко прослушиваются и имеют соответствующие временные интервалы. Контроль сигналов опознавания позволяет выявить сигналы от мешающих радиостанций. Если ОПРС/NDB обеспечивает передачу речевых сообщений, например, сводку погоды, то необходимо проверить качество речевых сигналов путем запроса передачи этого речевого сообщения, если такие передачи не ведутся непрерывно, и проверить его качество и отсутствие помех.
Периодические летные проверки ОПРС/NDB не проводятся. Контроль за качеством функционирования приводной радиостанции в процессе эксплуатации осуществляется с помощью наземных средств контроля и по реальному воздушному движению (отзывам экипажей рейсовых ВС).
В тех случаях, когда в состав оборудования ОПРС/NDB входит МРМ, летная проверка отдельной приводной радиостанции с радиомаркером проводится один раз в три года.
Зона действия трассового МРМ (ОПРС с МРМ) определяется путем измерения напряженности поля (Ем) на границах и внутри зоны действия при полете ВСЛ над маркером (ОПРС) на высоте проверки приводной радиостанции в соответствии с требованиями, приведенными в пунктах 36-38.
Перечень требований ИКАО к летной проверке ОПРС приведен в приложении N 4, а форма отчета о летной проверке ОПРС - в приложении N 6.
55. Летные проверки при вводе в эксплуатацию наземного автоматического радиопеленгатора (далее - АРП/VDF), предназначенного для определения азимута (пеленга) ВС относительно точки установки этого радиопеленгатора по сигналам бортовых связных радиостанций, рекомендуется выполнять с маневрирования ВСЛ по орбите для выявления систематической ошибки АРП/VDF и далее выполнять полеты по основным воздушным трассам с целью определения точностных характеристик АРП/VDF на этих обслуживаемых трассах.
При вводе автоматического радиопеленгатора в эксплуатацию летная проверка проводится на одной частоте радиопеленгатора по основным воздушным трассам, обслуживаемым данным АРП/VDF.
Периодические летные проверки АРП/VDF проводятся один раз в два года на одной частоте радиопеленгатора и при этих проверках проверяются только точностные характеристики автоматического радиопеленгатора и вычисляется среднеквадратическая ошибка информации о пеленге.
56. Среднеквадратическая ошибка информации о пеленге определяется при маневрировании ВСЛ по орбите и по воздушным трассам.
При полете по орбите маневрирование ВСЛ осуществляется на высоте 2700-3000 м (9000-10000 фут) радиусом 30-50 км (15-25 м. миль) от места установки АФУ АРП (выбранного контрольного ориентира).
АЛК работает в режиме АРП при полете ВСЛ по орбите.
Бортовой инженер-оператор АЛК (штурман ВСЛ) через каждые 10° орбитального полета по радиосвязи сообщает ИТП радиопеленгатора (оператору АРП) команду: "..." градусов" - "ОТСЧЕТ" и далее безречевой сигнал в течение трех секунд и одновременно измеряет азимут/пеленг ВСЛ (А/П![]() ) с регистрацией результатов в бортовом журнале. Причем команда "ОТСЧЕТ" подается в момент пересечения ВСЛ измеряемого пеленга. Оператор АРП (ИТП радиопеленгатора) по отметкам ВСЛ на экране индикатора радиопеленгатора определяет текущий азимут/пеленг (А/Ппi) на ВСЛ, фиксирует результаты пеленгования в рабочем журнале и сообщает данные пеленга на борт воздушного судна-лаборатории.
) с регистрацией результатов в бортовом журнале. Причем команда "ОТСЧЕТ" подается в момент пересечения ВСЛ измеряемого пеленга. Оператор АРП (ИТП радиопеленгатора) по отметкам ВСЛ на экране индикатора радиопеленгатора определяет текущий азимут/пеленг (А/Ппi) на ВСЛ, фиксирует результаты пеленгования в рабочем журнале и сообщает данные пеленга на борт воздушного судна-лаборатории.
При невозможности выполнения полетов по орбите из-за топографических условий местности, наличия специальных зон и по другим объективным причинам летная проверка точностных характеристик АРП/VDF проводится по наземным контрольным ориентирам. Контрольные ориентиры (КО) выбираются в районе воздушных трасс (коридоров) на расстоянии 30-60 км от АФУ АРП. При этом контрольные ориентиры хорошо просматриваются с высоты полета ВСЛ, равной 400 м - 1000 м (мост, перекресток дорог, церковь и т.п.), азимут/пеленг их рассчитан с точностью до десятых долей градуса, указано расстояние от АРП и рекомендована высота прохода ВСЛ над контрольным ориентиром относительно АФУ радиопеленгатора.
Схема маневрирования ВСЛ при проверке точностных характеристик АРП по контрольным ориентирам приведена на рисунке 15 приложения N 1.
Воздушное судно-лаборатория выводится на выбранный контрольный ориентир. БО АЛК (второй пилот, штурман ВСЛ) устанавливает радиосвязь с диспетчером УВД и при подходе к выбранному КО подает команду "ВНИМАНИЕ" и далее трехсекундные безречевые сигналы по радиостанции для определения азимута/пеленга на экране индикатора АРП (экране отображения радиолокационной информации). В момент точного прохода ВСЛ над контрольным ориентиром БО АЛК фиксирует это событие на регистрирующей аппаратуре, считывает показания азимута/пеленга, а также по радиосвязи командой "ОТСЧЕТ" информирует ИТП радиопеленгатора для считывания показаний азимута/пеленга на экране индикатора АРП (экране отображения радиолокационной информации). Над каждым КО выполняется не менее трех проходов ВСЛ в направлениях "НА" и "ОТ" АРП.
После окончания летной проверки БО АЛК совместно с ИТП радиопеленгатора обрабатывают результаты проверки точностных характеристик АРП по контрольным ориентирам по формулам:
![]() ,
,  , где
, где
![]() i - ошибка информации об азимуте/пеленге для каждого КО, градус;
i - ошибка информации об азимуте/пеленге для каждого КО, градус;
![]() - среднее значение азимута/пеленга в п заходах ВСЛ, градус;
- среднее значение азимута/пеленга в п заходах ВСЛ, градус;
Aoi - азимут/пеленг i ориентира, определенный расчетным путем, градус;
n - количество заходов ВСЛ над контрольным ориентиром.
Оценка точностных характеристик АРП/VDF на воздушных трассах осуществляется в комплексе с проверкой зоны действия АРП в горизонтальной плоскости (пункт 57) при полетах ВСЛ по основным воздушным трассам (коридорам) на высотах 1000 м (3300 фут) и 3000 м (10000 фут), но не ниже безопасной, до удалений 120-200 км (65-110 м. миль) от АФУ АРП в направлениях "ОТ" и "НА" радиопеленгатор.
При использовании АРП/VDF в качестве аэродромного и трассового определение среднеквадратической ошибки информации об азимуте/пеленге проводится при полетах ВСЛ по орбите (контрольным ориентирам), а зона действия АРП/VDF определяется на высоте 6000 м (20000 фут) по воздушным трассам при полетах ВСЛ в направлениях "ОТ" и "НА" радиопеленгатор.
Летные проверки АРП/VDF, входящих в состав автоматизированных систем управления воздушным движением, проводятся на высоте 6000 м (20000 фут) до удалений 240-370 км (130-200 м. миль) от АФУ АРП/VDF по воздушным трассам при полетах ВСЛ в направлениях "ОТ" и "НА" радиопеленгатор.
Периодические летные проверки АРП/VDF из состава автоматизированных систем управления воздушным движением допускается проводить с использованием информации от реального воздушного движения и определением истинного значения азимута/пеленга воздушного судна по радиолокационной информации автоматизированных систем управления.
АЛК работает в режиме АРП при полете ВСЛ по трассе.
Бортовой инженер-оператор АЛК (штурман ВСЛ) через каждые 10 км (на границе ЗД АРП более часто, через каждые 2-3 км) по радиосвязи сообщает ИТП радиопеленгатора (оператору АРП) команду: "удаление -"..." км" - "ОТСЧЕТ" и далее безречевой сигнал в течение трех секунд, одновременно измеряет азимут/пеленг ВСЛ (А/Пвслi) и регистрирует результаты в бортовом журнале. Оператор АРП (ИТП радиопеленгатора) по отметкам ВСЛ на экране индикатора радиопеленгатора определяет текущий азимут/пеленг (А/Ппi) на ВСЛ, фиксирует результаты пеленгования в рабочем журнале и сообщает данные пеленга на борт ВСЛ.
Результаты измерения информации об азимуте/пеленге на борту ВСЛ и на экране радиопеленгатора (экране отображения радиолокационной информации) используются для определения среднеквадратической ошибки информации об азимуте/пеленге при маневрировании ВСЛ по орбите и воздушным трассам по формулам:
![]() , где
, где
![]() - ошибка пеленгования с учетом знака, градус;
- ошибка пеленгования с учетом знака, градус;
Апi - величина азимута/пеленга измеренная на экране АРП, градус;
Авслi - величина азимута/пеленга измеренная на борту ВСЛ, градус;
![]() , где
, где
![]() П - систематическая составляющая ошибки АРП, градус;
П - систематическая составляющая ошибки АРП, градус;
 , где
, где
![]() - среднеквадратическая ошибка информации о пеленге АРП, градус;
- среднеквадратическая ошибка информации о пеленге АРП, градус;
![]() Апi - ошибка пеленгования с учетом знака, градус;
Апi - ошибка пеленгования с учетом знака, градус;
![]() П - систематическая составляющая ошибки АРП, градус;
П - систематическая составляющая ошибки АРП, градус;
n - количество отсчетов.
Среднеквадратическая ошибка информации о пеленге (![]() ) при полетах по орбите и по воздушной трассе составляет не более
) при полетах по орбите и по воздушной трассе составляет не более ![]() 1,5°. (Для радиопеленгатора типа АРП-75 не более
1,5°. (Для радиопеленгатора типа АРП-75 не более ![]() 2,5°).
2,5°).
57. Проверка определенной области воздушного пространства в горизонтальной плоскости, в пределах которой сигнал автоматического радиопеленгатора с заданными характеристиками обеспечивает диспетчера УВД навигационной информацией с допустимой погрешностью (далее - зона действия АРП в горизонтальной плоскости), осуществляется при полетах ВСЛ по основным воздушным трассам (коридорам) на высотах 1000 м (3300 фут) и 3000 м (10000 фут), но не ниже безопасной, до удалений 120-200 км (65-110 м. миль) от АФУ АРП.
Летные проверки АРП/VDF, входящих в состав автоматизированных систем управления воздушным движением (трассовых), проводятся на высоте 6000 м (20000 фут) до удалений 240-370 км (130-200 м. миль) от АФУ АРП/VDF по воздушным трассам при полетах ВСЛ в направлениях "ОТ" и "НА" радиопеленгатор.
АЛК работает в режиме АРП при полетах по трассам.
При выполнении полетов "ОТ" АФУ АРП и появлении флуктуации пеленга на экране индикатора АРП более ![]() 5° БО АЛК по информации оператора АРП (ИТП радиопеленгатора) определяет дальность до радиопеленгатора (местоположение ВСЛ), которая и является зоной действия АРП (дальность действия радиопеленгатора) в горизонтальной плоскости.
5° БО АЛК по информации оператора АРП (ИТП радиопеленгатора) определяет дальность до радиопеленгатора (местоположение ВСЛ), которая и является зоной действия АРП (дальность действия радиопеленгатора) в горизонтальной плоскости.
При выполнении полетов "НА" радиопеленгатор зона действия АРП (дальность действия) определяется в момент, когда флуктуации пеленга по экрану индикатора АРП будут менее ![]() 5°.
5°.
Зона действия автоматического радиопеленгатора в горизонтальной плоскости (дальность действия) составляет не менее 80 км (45 м. миль) на высоте полета ВС 1000 м (3300 фут) и 150 км (85 м. миль) на высоте полета ВС 3000 м (10000 фут).
58. Проверка определенной области воздушного пространства в вертикальной плоскости, в пределах которой сигнал автоматического радиопеленгатора с заданными характеристиками обеспечивает диспетчера УВД навигационной информацией с допустимой погрешностью (далее - зона действия АРП в вертикальной плоскости), осуществляется при маневрировании ВСЛ по основным воздушным трассам (коридорам) с дальности 7-10 км (4-5,5 м. миль) от АФУ АРП на высоте 2700-3000 м (9000-10000 фут) в направлении "НА" радиопеленгатор с точным проходом ВСЛ над АРП и полетом "ОТ" радиопеленгатора до удаления 7-10 км (4-5,5 м. миль) от АФУ АРП.
АЛК работает в режиме АРП при полетах по трассам.
С дальности 7-10 км (4-5,5 м. миль) от АФУ радиопеленгатора на борту ВСЛ включается радиостанция в режим непрерывного излучения (период работы радиостанции на передачу не должен превышать время, установленное эксплуатационной документацией на этот тип аппаратуры). В момент исчезновения (появления) на индикаторе АРП отметки от ВСЛ (пеленга) оператор АРП (ИТП радиопеленгатора) по радиосвязи подает на ВСЛ команду "ОТСЧЕТ". Бортовой инженер-оператор АЛК по получении команды "ОТСЧЕТ" проводит измерение угла места (![]() ) относительно точки установки АФУ АРП, а в момент уверенного появления пеленгования аналогично измеряет угол места (
) относительно точки установки АФУ АРП, а в момент уверенного появления пеленгования аналогично измеряет угол места (![]() ). Зона действия АРП в вертикальной плоскости определяется значением угла уверенного пеленгования и вычисляется по формуле:
). Зона действия АРП в вертикальной плоскости определяется значением угла уверенного пеленгования и вычисляется по формуле:
![]() , где
, где
![]() у - угол уверенного пеленгования в вертикальной плоскости, градус;
у - угол уверенного пеленгования в вертикальной плоскости, градус;
![]() - угол места при исчезновении отметки от ВСЛ на экране индикатора АРП, градус;
- угол места при исчезновении отметки от ВСЛ на экране индикатора АРП, градус;
![]() - угол места при появлении отметки от ВСЛ на экране индикатора АРП, градус.
- угол места при появлении отметки от ВСЛ на экране индикатора АРП, градус.
Зона действия АРП/VDF в вертикальной плоскости (по углу места) составляет величину не менее 45,0°.
Перечень требований ИКАО к летной проверке АРП приведен в приложении N 4, а форма отчета о летной проверке радиопеленгатора - в приложении N 6.
V. Методики летных проверок параметров
и характеристик посадочного радиолокатора
59. Посадочный радиолокатор (далее - ПРЛ/PAR) является частью посадочной радиолокационной системы, которая обеспечивает определение дальности, азимута и угла места ВС на конечных этапах захода на посадку.
ПРЛ/PAR формирует траекторию захода на посадку для выравнивания по курсу и снижения воздушного судна на конечном этапе захода на посадку на заданную ВПП по передаваемым с земли устным указаниям диспетчера УВД.
60. Проверка определенного сектора воздушного пространства, в пределах которого сигнал посадочного радиолокатора с заданными характеристиками обеспечивает диспетчера УВД навигационной информацией с допустимой погрешностью (далее - зона действия и вероятность обнаружения ВС ПРЛ), осуществляется при выполнении ВСЛ заходов на посадку с "прямой" в соответствии с аэронавигационным паспортом аэродрома (инструкцией по производству полетов в районе аэродрома/аэроузла).
ПРЛ/PAR работает в соответствии с руководством (инструкцией) по эксплуатации на данный тип посадочного радиолокатора. Во время захода ВСЛ с "прямой" проводится фотографирование экрана индикатора ПРЛ диспетчера УВД, начиная с максимальной дальности действия радиолокатора и до момента посадки.
С каждого направления посадки ВС на данном аэродроме (МКп - "первое", МКп - "второе") фотографируется (документируется) по два захода ВСЛ для первого и второго комплектов оборудования посадочного радиолокатора, причем:
в первом заходе радиолокатор работает в режиме "СДЦ" с круговой поляризацией радиоволн;
во втором заходе - в режиме "ПАСС" с линейной поляризацией радиоволн.
В процессе маневрирования ВСЛ оценивается качество отметки от ВС по всему диапазону дальности действия на курсовой и глиссадной частях экрана индикатора ПРЛ (аппаратуры отображения информации) диспетчера УВД и проверяется соответствие графической информации, нанесенной на экраны индикаторов, действующему аэронавигационному паспорту аэродрома (инструкции по производству полетов на данном аэродроме/аэроузле).
Отмечаются удаления, на которых наблюдаются пропадания отметки от ВСЛ или слабая засветка отметки (время сохранения отметки на экране индикатора ПРЛ диспетчера УВД менее времени одного сканирования антенны). Каждый заход ВСЛ фотографируется с экрана индикатора на один фотокадр.
Фотографии (документированные материалы) зачетных заходов ВСЛ прилагаются к отчету по летной проверке ПРЛ/PAR.
Для определения вероятности обнаружения цели (ВС) масштаб дальности экрана индикатора (курсовая, глиссадная части экрана) делится на интервалы по 1,0 км (однокилометровые интервалы). При заходе ВСЛ производится оценка видимости отметки от ВС на экране индикатора по двум критериям:
"0" - отметка отсутствует за период обновления информации;
"1" - видимая отметка за период обновления информации.
Для каждого однокилометрового интервала рассчитывается вероятность обнаружения ВС по формуле:
![]() , где
, где
![]() - вероятность обнаружения ВС для i-ro интервала;
- вероятность обнаружения ВС для i-ro интервала;
![]() - количество видимых отметок от ВС для i-ro интервала;
- количество видимых отметок от ВС для i-ro интервала;
N - количество периодов обновления информации за время прохождения ВС однокилометрового интервала.
Вероятность обнаружения ВС рассчитывается по формуле:
![]() , где
, где
![]() - вероятность обнаружения ВС;
- вероятность обнаружения ВС;
![]() - вероятность обнаружения ВС на i-ом интервале;
- вероятность обнаружения ВС на i-ом интервале;
М - количество интервалов.
При двух и более заходах вычисляют среднеарифметическое значение вероятности обнаружения ВС для каждого интервала дальности.
61. Проверка сектора обзора диаграммы направленности антенны курса и угла обзора диаграммы направленности антенны глиссады ПРЛ/PAR в горизонтальной плоскости выполняется при маневрировании ВСЛ по линии пути, проходящей под углами ![]() 90° относительно посадочного курса на высоте 400-800 м, но не менее безопасной. Заходы ВСЛ выполняются справа налево и слева направо на удалениях 4 км и 8 км от порога ВПП для посадочного радиолокатора типа РП-ЗГ или 6 км и 11 км для ПРЛ типа РП-4Г, РП-5Г. На каждом расстоянии выполняется по два захода ВСЛ для основного и второго направления посадки:
90° относительно посадочного курса на высоте 400-800 м, но не менее безопасной. Заходы ВСЛ выполняются справа налево и слева направо на удалениях 4 км и 8 км от порога ВПП для посадочного радиолокатора типа РП-ЗГ или 6 км и 11 км для ПРЛ типа РП-4Г, РП-5Г. На каждом расстоянии выполняется по два захода ВСЛ для основного и второго направления посадки:
а) АЛК работает в режиме ПРЛ по определению местоположения ВСЛ в пространстве с использованием аппаратуры СНС - ГЛОНАСС/GPS.
Наблюдение за отметкой от ВСЛ производится по экрану индикатора ПРЛ диспетчера УВД. В моменты появления и пропадания отметки от ВСЛ на курсовой или глиссадной части экрана индикатора по каналу радиосвязи на борт ВСЛ подаются соответствующие команды "ОТСЧЕТ КУРС" или "ОТСЧЕТ ГЛИССАДА".
В момент получения команды "ОТСЧЕТ" БО АЛК определяет угловые отклонения ВСЛ (![]() ,
, ![]() ) в горизонтальной плоскости и фиксирует результаты в бортовом журнале.
) в горизонтальной плоскости и фиксирует результаты в бортовом журнале.
Сектор обзора диаграммы направленности антенны курса в горизонтальной плоскости определяется как среднеарифметическое значение суммы углов, в пределах которых отметка от ВСЛ наблюдается с момента появления до момента исчезновения на курсовой части индикатора, по формуле:
 , где
, где
![]() - сектор обзора антенны курса в горизонтальной плоскости;
- сектор обзора антенны курса в горизонтальной плоскости;
![]() - положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении;
- положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении;
![]() - положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении;
- положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении;
n - количество отсчетов.
Угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости определяется как среднеарифметическое значение суммы углов, в пределах которых отметка от ВСЛ наблюдается с момента появления до момента исчезновения на глиссадной части экрана индикатора ПРЛ диспетчера УВД, по формуле:
 , где
, где
![]() - угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости;
- угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости;
![]() - положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении;
- положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении;
![]() - положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении;
- положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении;
n - количество отсчетов;
б) АЛК работает в режиме ПРЛ по определению местоположения ВСЛ в пространстве с использованием аппаратуры СТИ.
Аппаратура СТИ устанавливается на линии, строго перпендикулярной оси ВПП и проходящей через центр антенной системы радиолокатора, на безопасном расстоянии от АФУ ПРЛ, на расстоянии от оси ВПП, кратном 10 м, в соответствии со схемой, приведенной на рисунке 16 приложения N 1 (при необходимости СТИ размещают в точке, изображенной на рисунке 16 приложения N 1 пунктиром).
Оператор СТИ осуществляет слежение за носовой частью ВСЛ в автоматическом или ручном режиме в соответствии с РЭ АЛК. Одновременно на командно-диспетчерском пункте представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) ведет наблюдение за отметкой от ВСЛ по экрану индикатора посадочного радиолокатора. В момент появления и исчезновения отметки от ВСЛ на курсовой или глиссадной части экрана индикатора представитель испытательной бригады подает оператору СТИ и бортовому инженеру-оператору АЛК соответствующие команды: "ОТСЧЕТ КУРС" или "ОТСЧЕТ ГЛИССАДА".
В момент получения команды "ОТСЧЕТ" определяются угловые отклонения ВСЛ (![]() ,
,![]() ) от траектории снижения в горизонтальной плоскости и результаты фиксируются в бортовом журнале.
) от траектории снижения в горизонтальной плоскости и результаты фиксируются в бортовом журнале.
Сектор обзора диаграммы направленности антенны курса в горизонтальной плоскости определяется как среднеарифметическое значение суммы углов, в пределах которых отметка от ВСЛ наблюдается с момента появления до момента исчезновения на курсовой части индикатора, по формуле:
, где
![]() - сектор обзора антенны курса в горизонтальной плоскости, градус;
- сектор обзора антенны курса в горизонтальной плоскости, градус;
![]() - положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении, градус;
- положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении, градус;
![]() - положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении, градус;
- положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора при i-ом измерении, градус;
n - количество отсчетов.
Угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости определяется как среднеарифметическое значение суммы углов, в пределах которых отметка от ВСЛ наблюдается с момента появления до момента исчезновения ВС на глиссадной части экрана индикатора, по формуле:
, где
![]() - угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости, градус;
- угол обзора диаграммы направленности антенны глиссады в горизонтальной плоскости, градус;
![]() - положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении, градус;
- положение ВСЛ в пространстве по азимуту в момент появления отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении, градус;
![]() - положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении, градус;
- положение ВСЛ в пространстве по азимуту в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора при i-ом измерении, градус;
n - количество отсчетов.
63. Проверка сектора обзора диаграммы направленности антенны глиссады и угла обзора диаграммы направленности антенны курса ПРЛ/PAR в вертикальной плоскости осуществляется при выполнении ВСЛ предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме, с последующим снижением по глиссаде и дальнейшим уходом на второй круг.
Полеты выполняются не менее чем на трех высотах: 300 м, но не ниже безопасной, 800 м и 1500 м для ПРЛ типа РП-ЗГ или 300 м, но не ниже безопасной, 800 м и 2000 м для ПРЛ типа РП-4Г, РП-5Г. На каждой высоте выполняется по 1-2 захода ВСЛ для основного и второго направления посадки.
Заходы ВСЛ выполняется с удаления, соответствующего максимальной дальности действия ПРЛ, указанной в ЭД (не менее 30 км) до прохождения траверза радиолокатора:
а) АЛК работает в режиме ПРЛ по определению местоположения ВСЛ в пространстве с использованием аппаратуры СНС - ГЛОНАСС/GPS.
Представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) ведет наблюдение за отметкой от ВСЛ по экрану индикатора ПРЛ диспетчера УВД. В моменты появления (исчезновения) отметки от ВСЛ на курсовой или глиссадной части индикатора по радиосвязи на борт ВСЛ подаются соответствующие команды "ОТСЧЕТ КУРС ПЛЮС" ("ОТСЧЕТ КУРС МИНУС") ИЛИ "ОТСЧЕТ ГЛИССАДА ПЛЮС" ("ОТСЧЕТ ГЛИССАДА МИНУС").
В момент получения команды "ОТСЧЕТ" БО АЛК определяет угловые отклонения ВСЛ (![]() кi,
кi, ![]() гi) в вертикальной плоскости, а также удаление ВСЛ от АФУ радиолокатора (Дкi, Дгi) и фиксирует результаты в бортовом журнале.
гi) в вертикальной плоскости, а также удаление ВСЛ от АФУ радиолокатора (Дкi, Дгi) и фиксирует результаты в бортовом журнале.
По результатам отсчетов вычисляются верхняя и нижняя границы зоны действия курсового канала ПРЛ и верхняя граница глиссадного канала ПРЛ на высоте круга, а также зона действия ПРЛ в горизонтальной плоскости по курсовому и глиссадному каналу, определяемые максимальным удалением наличия отметки от ВСЛ на курсовой и глиссадной части индикатора ПРЛ соответственно.
При проведении летной проверки необходимо учитывать, что оценка нижней границы угла обзора глиссадной антенны ПРЛ в вертикальной плоскости проводится без использования ВСЛ, а выполняется по наземным целям с помощью квадрантного уровня (антенна глиссады устанавливается в горизонтальное положение и настраивается положение "минус 1,0°", что соответствует нижней границе угла обзора антенны глиссады (![]() гн = минус 1,0°);
гн = минус 1,0°);
б) АЛК работает в режиме ПРЛ по определению местоположения ВСЛ в пространстве с использованием аппаратуры СТИ.
Аппаратура СТИ устанавливается на линии, перпендикулярной оси ВПП и проходящей через центр АФУ ПРЛ, на безопасном расстоянии от антенной системы ПРЛ и на удалении от оси ВПП, кратном 10 м, в соответствии со схемой, приведенной на рисунке 16 приложения N 1 (при необходимости СТИ размещают в точке, изображенной на рисунке 16 приложения N 1 пунктиром).
Оператор СТИ осуществляет слежение за носовой частью ВСЛ в автоматическом или ручном режиме в соответствии с РЭ АЛК.
Одновременно на командно-диспетчерском пункте представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) наблюдает за отметкой от ВСЛ по экрану индикатора ПРЛ диспетчера УВД, в момент появления и исчезновения отметки от ВСЛ на курсовой части экрана индикатора ПРЛ или пропадания отметки от ВСЛ на глиссадной части экрана индикатора ПРЛ и подает соответствующие команды "ОТСЧЕТ КУРС" или "ОТСЧЕТ ГЛИССАДА" по радиосвязи на борт ВСЛ, а также определяет расстояние до ВСЛ по экрану индикатора ПРЛ.
Бортовой инженер-оператор АЛК по команде "ОТСЧЕТ" считывает показание высоты полета ВСЛ по барометрическому высотомеру и сообщает ее значение по радиосвязи представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) на командно-диспетчерский пункт.
Положение ВСЛ в пространстве по углу места, определенное оператором СТИ, в момент появления и исчезновения отметки от ВСЛ на курсовой части экрана индикатора ПРЛ соответствует нижней и верхней границам диаграммы направленности антенны курса посадочного радиолокатора. Эти границы определяются как среднеарифметическая величина по отсчетам угла места с помощью СТИ при заходах ВСЛ на каждой из двух высот:
 , где
, где
![]() - угол обзора диаграммы направленности антенны курса в вертикальной плоскости, градус;
- угол обзора диаграммы направленности антенны курса в вертикальной плоскости, градус;
![]() - положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент появления отметки от ВСЛ на курсовой части экрана индикатора, градус;
- положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент появления отметки от ВСЛ на курсовой части экрана индикатора, градус;
![]() - положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора ПРЛ, градус;
- положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент исчезновения отметки от ВСЛ на курсовой части экрана индикатора ПРЛ, градус;
n - количество отсчетов.
Верхняя граница сектора обзора антенны глиссады в вертикальной плоскости определяется как среднеарифметическая величина по двум отсчетам угла места по аппаратуре СТИ в моменты исчезновения отметки от ВСЛ на глиссадной части индикатора при заходах ВСЛ на двух высотах:
 ,
,
![]() - угол обзора диаграммы направленности антенны глиссады в вертикальной плоскости, градус;
- угол обзора диаграммы направленности антенны глиссады в вертикальной плоскости, градус;
![]() - положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора ПРЛ, градус;
- положение ВСЛ в пространстве по углу места, определенное по СТИ, в момент исчезновения отметки от ВСЛ на глиссадной части экрана индикатора ПРЛ, градус;
n - количество отсчетов.
Проверка нижней границы угла обзора антенны глиссады ПРЛ в вертикальной плоскости проводится с помощью квадрантного уровня.
Антенна глиссады устанавливается в горизонтальное положение, настраивается "минус 1,0°" и проверяется изображение временной развертки на индикаторе посадочного радиолокатора. Аналогично проверяется установка антенны глиссады ПРЛ в положение "плюс 9,0°".
64. Минимальные значения высоты и дальности, до которых возможно наблюдение отметки от ВС по экрану индикатора глиссады, определяются после выполнения необходимого количества заходов ВСЛ для одного направления посадки (пункты 60-63) и ВСЛ выполняет посадку с этим же курсом.
Во время захода ВСЛ на посадку ведется наблюдение за его отметкой на глиссадной части экрана индикатора ПРЛ диспетчера УВД. В момент, предшествующий соприкосновению отметки от ВСЛ с "местником" (при работе ПРЛ в режиме "ПАСС"), или в момент пропадания отметки (режим "ПАСС" или "СДЦ") представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) подает команду "ОТСЧЕТ" на борт ВСЛ по радиосвязи и одновременно определяет по экрану индикатора ПРЛ удаление ВСЛ от линии нулевого отсчета дальности (от порога ВПП или от точки посадки в зависимости от привязки ПРЛ на данном аэродроме).
На борту ВСЛ при получении команды "ОТСЧЕТ" бортовой инженер-оператор АЛК считывает значение высоты полета по барометрическому высотомеру и передает ее значение представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) на командно-диспетчерский пункт.
Для каждого комплекта оборудования ПРЛ при работе на разные антенны выполняется по два захода ВСЛ на посадку с первым и вторым посадочными курсами (МКп - "1", МКп - "2"). По результатам трех отсчетов определяются средние минимальные значения высоты и дальности, до которых возможно наблюдение отметки от ВСЛ по экрану индикатора глиссады.
65. Ошибка информации по курсу ПРЛ определяется в зависимости от технических возможностей АЛК и наличия на данном направлении посадки радиомаячной системы инструментального захода ВС на посадку:
а) АЛК работает в режиме ПРЛ по азимуту (каналу курса). Местоположение ВСЛ в пространстве определяется с помощью аппаратуры СНС - ГЛОНАСС/GPS. Объективный контроль осуществляется фотографированием экрана индикатора ПРЛ.
В моменты точного нахождения отметки от ВСЛ на курсовой линии экрана индикатора ПРЛ представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) подает по радиосвязи на борт ВСЛ команды "ОТСЧЕТ".
При получении команды "ОТСЧЕТ" БО АЛК регистрирует текущие значения углов отклонения траектории полета ВСЛ по курсовому каналу (поперечное смещение ВС от линии курса в метрах) в бортовом журнале и на бортовой регистрирующей аппаратуре;
б) АЛК работает в режиме ПРЛ по азимуту (каналу курса). Местоположение ВСЛ в пространстве определяется с помощью аппаратуры СТИ. Объективный контроль осуществляется фотографированием экрана индикатора ПРЛ.
При наличии на проверяемом направлении захода ВС на посадку РМС инструментальной посадки аппаратура СТИ устанавливается в точке, используемой для летной проверки КРМ (определение положения средней линии курса относительно осевой линии ВПП).
При отсутствии РМС инструментальной посадки на данном направлении посадки СТИ устанавливается на безопасном от порога ВПП удалении на продолжении осевой линии ВПП и юстируется точно по ее оси. Рекомендуемое место установки СТИ приведено на рисунке 17 приложения N 1.
С помощью тубуса или кронштейна на резервный экран индикатора ПРЛ диспетчера УВД устанавливается фотоаппарат зеркального типа, перед которым размещается заслонка. Объектив фотоаппарата открывается на весь период захода ВСЛ на посадку, фотографирование отметки от ВСЛ проводится с помощью заслонки в моменты отсчета положения ВСЛ. Это позволяет получить дискретную запись траектории захода на посадку ВСЛ на один фотокадр, что облегчает обработку результатов летной проверки.
Оператор СТИ осуществляет слежение за ВСЛ в соответствии с РЭ АЛК.
В моменты точного нахождения ВСЛ в плоскости осевой линии ВПП, фиксируемые по нулевому значению индикатора аппаратуры траекторных измерений, оператор СТИ подает на командно-диспетчерский пункт представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) команды "ОТСЧЕТ".
По команде "ОТСЧЕТ" представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) выполняет фотографирование экрана индикатора радиолокатора.
Порядок дешифрирования фотоснимков траектории полета ВСЛ с экрана индикатора ПРЛ приведен в приложении N 2;
в) ошибка информации по курсу при наличии на данном направлении посадки РМС инструментального захода ВС на посадку определяется с использованием сигналов навигационных приемников АЛК в качестве эталонной информации о траектории полета ВСЛ по азимуту и фотографированием экрана индикатора радиолокатора.
АЛК работает в режиме KPM/ILS по определению положения средней линии курса в соответствии с РЭ АЛК. В качестве эталона используется сигнал КРМ при условии, что положение средней линии курса для данного направления посадки находится в пределах ![]() 5,0 м от оси ВПП.
5,0 м от оси ВПП.
В моменты точного нахождения ВСЛ на линии курса, фиксируемые по нулевому значению тока микроамперметра, включенного в курсовой тракт навигационного приемника, БО АЛК подает на командно-диспетчерский пункт представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) команды "ОТСЧЕТ".
По команде "ОТСЧЕТ" представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) производит фотографирование экрана индикатора радиолокатора.
Порядок дешифрирования фотоснимков траектории полета ВСЛ с экрана индикатора ПРЛ приведен в приложении N 2.
66. Ошибка информации по глиссаде определяется в зависимости от технических возможностей АЛК и наличия на данном направлении посадки радиомаячной системы инструментального захода ВС на посадку:
а) АЛК работает в режиме ПРЛ по углу места (каналу глиссады). Местоположение ВСЛ в пространстве определяется с помощью аппаратуры СНС - ГЛОНАСС/GPS. Объективный контроль осуществляется фотографированием экрана индикатора ПРЛ.
В моменты точного нахождения отметки от ВСЛ на линии глиссады экрана индикатора ПРЛ представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) подает по радиосвязи на борт ВСЛ команды "ОТСЧЕТ".
При получении команды "ОТСЧЕТ" БО АЛК регистрирует текущие значения углов отклонения траектории полета ВСЛ по глиссадному каналу (вертикальное смещение ВСЛ от линии глиссады в метрах) в бортовом журнале и на бортовой регистрирующей аппаратуре;
б) АЛК работает в режиме ПРЛ по углу места (каналу глиссады). Местоположение ВСЛ в пространстве определяется с помощью аппаратуры СТИ. Объективный контроль осуществляется фотографированием экрана индикатора ПРЛ.
При наличии на проверяемом направлении посадки РМС инструментального захода ВС на посадку аппаратура СТИ устанавливается в точке, используемой для летной проверки ГРМ при измерении угла наклона глиссады.
При отсутствии РМС инструментальной посадки на данном направлении захода ВС на посадку СТИ устанавливается на безопасном от края ВПП удалении, не превышающем 100 м от ее оси. Рекомендуемое место установки СТИ приведено на рисунке 18 приложения N 1.
С помощью тубуса или кронштейна на резервный экран индикатора ПРЛ диспетчера УВД устанавливается фотоаппарат зеркального типа, перед которым размещается заслонка. Объектив фотоаппарата открывается на весь период захода ВСЛ на посадку, а фотографирование отметки от ВСЛ проводится с помощью заслонки в моменты отсчета положения ВСЛ. Это позволяет получить дискретную запись траектории захода на посадку ВСЛ на один фотокадр, что облегчает обработку результатов проверки.
Оператор СТИ осуществляет слежение за ВСЛ в соответствии с РЭ АЛК.
В моменты точного нахождения ВСЛ в плоскости глиссады, фиксируемые по нулевому значению индикатора аппаратуры траекторных измерений, оператор СТИ подает на командно-диспетчерский пункт представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) команды "ОТСЧЕТ".
По команде "ОТСЧЕТ" представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) выполняет фотографирование экрана индикатора радиолокатора.
Порядок дешифрирования фотоснимков траектории полета ВСЛ с экрана индикатора ПРЛ приведен в приложении N 2.
Превышение высоты точки установки СТИ над точкой посадки (рисунок 18 приложения N 1) компенсируется переносом СТИ вперед на расстояние, которое определяется по формуле:
![]() , где
, где
Yт - расстояние, на котором устанавливается СТИ при определении ошибки информации по глиссаде, м;
h - высота центра оптической системы СТИ, м;
h' - разность высот места установки СТИ и точки посадки, м;
![]() - угол глиссады для данного направления посадки, градус;
- угол глиссады для данного направления посадки, градус;
в) ошибка информации по углу места (каналу глиссады) при наличии на данном направлении посадки РМС инструментального захода ВС на посадку определяется с использованием сигналов навигационных приемников АЛК в качестве эталонной информации о траектории полета ВСЛ по углу места и фотографированием экрана индикатора радиолокатора.
АЛК работает в режиме ГРМ/ILS по определению положения средней линии глиссады в соответствии с РЭ АЛК. В качестве эталона используется сигнал ГРМ при условии, что положение средней линии глиссады для данного направления посадки находится в пределах ![]() 0,04
0,04![]() от номинальной линии глиссады.
от номинальной линии глиссады.
В моменты точного нахождения ВСЛ на линии глиссады, фиксируемые по нулевому значению тока микроамперметра, включенного в глиссадный тракт навигационного приемника, БО АЛК подает на командно-диспетчерский пункт представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) команды "ОТСЧЕТ".
По команде "ОТСЧЕТ" представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) производит фотографирование экрана индикатора радиолокатора.
Порядок дешифрирования фотоснимков траектории полета ВСЛ с экрана индикатора ПРЛ приведен в приложении N 2.
67. Ошибка информации по дальности определяется при маневрировании ВСЛ над контрольными ориентирами по траектории захода ВС на посадку, по схеме предпосадочного маневра в соответствии с аэронавигационным паспортом аэродрома/аэроузла с использованием аппаратуры СНС - ГЛОНАСС/GPS в зависимости от технических характеристик АЛК:
а) АЛК работает в режиме ПРЛ по дальномерному каналу. Местоположение ВСЛ в пространстве определяется с помощью аппаратуры СНС - ГЛОНАСС/GPS.
В моменты точного нахождения отметки от ВСЛ на линии масштабных меток дальности экрана индикатора ПРЛ представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) подает по радиосвязи на борт ВСЛ команды "ОТСЧЕТ".
При получении команды "ОТСЧЕТ" БО АЛК регистрирует текущие значения дальности (Дi) до АФУ радиолокатора в бортовом журнале и на регистрирующей аппаратуре.
По измеренным текущим значениям дальности вычисляется ошибка информации ПРЛ/PAR по дальномерному каналу для каждого значения масштабных меток дальности экрана индикатора;
б) АЛК работает в режиме ПРЛ по дальномерному каналу. Ошибка информации по дальности определяется с помощью ориентиров на траектории захода ВС на посадку и фотографированием экрана индикатора дальности ПРЛ.
В качестве эталонных расстояний используются удаления до известных контрольных ориентиров (на продолжении осевой линии ВПП при их наличии в пределах 17 км), до ДПРМ, БПРМ и порога ВПП.
При проходе ВСЛ над контрольным ориентиром, ДПРМ и БПРМ, порогом ВПП БО АЛК подает на командно-диспетчерский пункт представителю испытательной бригады (лицу, ответственному за эксплуатацию ПРЛ, оператору ПРЛ) команды "ОТСЧЕТ".
По команде "ОТСЧЕТ" представитель испытательной бригады (лицо, ответственное за эксплуатацию ПРЛ, оператор ПРЛ) выполняет измерение дальности и фотографирование экрана индикатора ПРЛ.
Порядок дешифрирования фотоснимков траектории полета ВСЛ с экрана индикатора ПРЛ приведен в приложении N 2.
Перечень требований ИКАО к летной проверке ПРЛ приведен в приложении N 4, а форма отчета о летной проверке ПРЛ - в приложении N 6.
VI. Методики летных проверок параметров и
характеристик радиолокационных станций
68. Радиолокационная станция (далее - РЛС) может состоять из первичного обзорного радиолокатора (далее - ПОРЛ/PSR, SRE) и вторичного обзорного радиолокатора (далее - ВОРЛ/SSR) либо может быть выполнена в виде единой системы (радиолокационного комплекса), совмещающей в себе ПОРЛ/PSR, SRE и ВОРЛ/SSR.
Радиолокационные станции используются для выполнения функций наблюдения за воздушным движением на трассах (маршрутах) - ОРЛ-Т и в зоне аэродрома - ОРЛ-А. Сигналы радиолокационных датчиков могут подаваться на обыкновенные индикаторы кругового обзора (ИКО) либо, что более часто, в систему обработки радиолокационной информации (АПОИ/RDPS) или передаваться на экраны индикаторов аппаратуры отображения информации в центр УВД.
69. Цель летной проверки РЛС состоит в оценке пространственных характеристик радиолокационной станции и ее способности эффективно удовлетворять всем эксплуатационным требованиям, а также проверке соответствия графической информации, нанесенной на экраны индикаторов аппаратуры отображения (диспетчера УВД), действующему аэронавигационному паспорту аэродрома/аэроузла (инструкции по производству полетов).
При вводе РЛС в эксплуатацию проводится всесторонний анализ пространственных характеристик радиолокационных станций с помощью автоматизированных систем наземного контроля РЛС и аппаратуры летного контроля, установленной на ВСЛ. Причем при проверке ВОРЛ/SSR необходимо учитывать, что вторичный радиолокатор взаимодействует с бортовым оборудованием, его параметры как система в целом также зависят от правильного функционирования бортового приемоответчика.
70. Выбор оптимального угла наклона антенны РЛС осуществляется при выполнении горизонтального полета ВС на высотах 1000-1500 м (3300-5000 фут), но не ниже безопасной и высотах 3200-3800 м (10000-12500 фут) в зависимости от топографических условий местности. Полеты выполняются в направлении "ОТ" РЛС до момента устойчивого пропадания отметки от ВС на экране отображения радиолокационной информации на максимальную дальность по одному из направлений в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов) и "НА" РЛС с точным проходом ВСЛ над радиолокатором. На каждой высоте выполняется по два захода ВС при работе РЛС на основную и резервную антенны или первого и второго комплектов оборудования радиолокатора при работе их на разные антенные системы.
По экрану отображения радиолокационной информации на каждом обзоре антенны РЛС проводится наблюдение за отметками от ВС и по их наличию и качеству определяется зона обзора радиолокатора в вертикальной плоскости. По минимальной и максимальной дальности обнаружения ВС проверяется установка оптимального угла наклона основной и резервной антенн радиолокатора в вертикальной плоскости.
При проверке вторичного канала бортовая аппаратура (приемоответчик) работает в одном из режимов "УВД" или "RES".
71. Зона действия и вероятность правильного обнаружения первичных и вторичных РЛС определяются в два этапа.
На первом этапе, с использованием ВСЛ, определяются потенциальные характеристики радиолокационной станции, приведенные в эксплуатационной документации на проверяемый тип РЛС - зона действия (дальность действия) по первичному и вторичному каналам и точностные характеристики радиолокатора.
На втором этапе, с использованием реального воздушного движения (рейсовых ВС), проводится более полный сбор информации для определения вероятностных характеристик РЛС и построения графика зоны действия (дальности действия) радиолокационной станции.
Первый этап. Зона действия и вероятность правильного обнаружения РЛС с использованием ВСЛ определяются при маневрировании ВС по воздушным трассам (коридорам) максимально приближенным к радиальным по отношению к месту установки АФУ РЛС с минимальными углами закрытия в направлении "ОТ" РЛС до пропадания отметки от ВСЛ и "НА" РЛС с точным проходом над позицией установки радиолокатора на минимальном и промежуточном эшелонах, характерных для данного района УВД.
Проверка потенциальных возможностей РЛС - зоны действия первичных и вторичных РЛС (максимальной дальности действия) на минимальном и промежуточных эшелонах проводится комплексно в соответствии со схемами маневрировании ВСЛ, приведенными на рисунках 19 и 20 приложения N 1.
Маневрирование ВСЛ "ОТ" РЛС осуществляется:
на минимальном эшелоне до пропадания отметки от ВСЛ на экране отображения радиолокационной информации;
после пропадания отметки от ВСЛ, по команде диспетчера УВД, - набор высоты до промежуточного эшелона (появления отметки от ВСЛ) и дальнейшим горизонтальным полетом на этом промежуточном эшелоне до пропадания отметки от ВСЛ на экране отображения радиолокационной информации;
после пропадания отметки от ВСЛ, по команде диспетчера УВД, - стандартный разворот и полет "НА" РЛС на промежуточном эшелоне со снижением до минимального и проходом ВСЛ на этой высоте над позицией установки РЛС.
При наличии в составе РЛС вторичного канала АЛК ВСЛ работает в одном из режимов "УВД" или "RES". Для каждого режима и каждого комплекта РЛС (основного и резервного) выполняется полет ВСЛ "НА" и "ОТ" РЛС (режим "УВД" - один полет для основного комплекта и один - для резервного, режим "RBS" - один полет для основного комплекта и один - для резервного).
При наличии в составе РЛС только первичного канала выполняется полет ВСЛ "НА" и "ОТ" РЛС для каждого комплекта аппаратуры РЛС (один полет для основного комплекта и один - для резервного).
По экрану отображения радиолокационной информации проводится наблюдение за перемещением отметки от ВСЛ и на каждом обзоре фиксируется ее наличие отдельно по первичному и вторичному каналам, а также регистрируется прохождение дополнительной информации. В случае объединения информации первичного и вторичного каналов РЛС на выходе аппаратуры первичной обработки информации регистрация наличия отметки от ВСЛ на экране отображения радиолокационной информации производится по виду отметки: первичная, вторичная или объединенная. Решение об обнаружении отметки от ВС на экране отображения радиолокационной информации "ДА (X) - НЕТ (О)" принимается при каждом пересечении диаграммой направленности антенны РЛС азимута ВС. Кроме этого, оценивается прохождение дополнительной информации (при наличии) и фиксируется информация о дальности до ВС. Данная информация может быть получена с помощью автоматизированных систем наземного контроля РЛС.
Для каждой высоты полета, отдельно при маневрировании ВСЛ "ОТ" и "НА" РЛС, оценивается частота обнаружения, определяемая как отношение числа обнаружений на отрезке маршрута к количеству оборотов антенны за промежуток времени, в течение которого ВС пролетает этот отрезок (т.е. к максимально возможному количеству обнаружений на данном отрезке маршрута). Расчет частоты обнаружений проводится по отношению к отрезку маршрута протяженностью, равной 10 км (так называемое "подвижное окно"). Внутри "подвижного окна" для всех полетов на данной высоте, отдельно "НА" и "ОТ" РЛС, выполняется не менее 40 отсчетов (с учетом информации, полученной при наблюдении за реальным воздушным движением в соответствии с методикой, приведенной в пункте 30). Результат расчета относится к точке маршрута, соответствующей середине "подвижного окна". Передвигая "подвижное окно" по трассе полета, определяется частота обнаружения, соответствующая каждой точке маршрута (пройденного ВС расстояния). Шаг перемещения "подвижного окна" по дальности соответствует перемещению воздушного судна между последовательными зондированиями (облучениями) диаграммой направленности антенны РЛС. Результаты считывания информации и вероятность обнаружения для полетов "ОТ" (Pi) и "НА" (Pj) РЛС по первичному и вторичному каналам (режим "УВД" и режим "RBS") отдельно заносятся в таблицу 1 приложения N 2 (при использовании наземных систем автоматизированного контроля РЛС заполнение этой таблицы не требуется).
На высотах полета ВС более 6000 м зона действия и вероятность правильного обнаружения определяются с использованием информации, получаемой при наблюдении за реальным воздушным движением в соответствии с методикой, приведенной в пункте 30.
Второй этап. Определение вероятностных характеристик РЛС и построения графика зоны действия радиолокационной станции с использованием реального воздушного движения осуществляется путем накопления информации по всем ВС в выбранном направлении воздушного движения (трассе, коридоре) и высотном диапазоне за период наблюдения с помощью десятикилометровых участков, перемещаемых по направлению наблюдения с шагом 5 или 10 км ("подвижное окно"). При этом в каждом "подвижном окне" подсчитываются:
общее количество возможных обнаружений ВС (целей);
количество реальных обнаружений ВС (целей).
По полученным результатам проводится расчет вероятности обнаружения для полетов "ОТ" (Pi) и "НА" (Pj) РЛС в соответствующем "подвижном окне", приведенный к его центру (данная информация может быть получена с помощью автоматизированных систем или автоматизированных рабочих мест, предназначенных для контроля и анализа радиолокационной информации РЛС), по формуле:
![]()
N![]() - количество обнаружений и количество пропусков отметки от ВС;
- количество обнаружений и количество пропусков отметки от ВС;
N![]() - количество реальных обнаружений ВС.
- количество реальных обнаружений ВС.
При определении вероятности обнаружения РЛС для повышения достоверности вычислений рекомендуется, особенно для участков воздушных трасс с низкой интенсивностью воздушного движения, применять весовые коэффициенты. При этом для каждого интервала между центрами "подвижного окна" рассчитывается величина вероятности обнаружения РЛС как среднеарифметическое значение из десяти отсчетов по формуле:
 где
где
![]() - вероятность обнаружения РЛС на i-м интервале наблюдений ("подвижное окно");
- вероятность обнаружения РЛС на i-м интервале наблюдений ("подвижное окно");
К1, К2, ..., К10 - весовые коэффициенты на рассматриваемом интервале наблюдений ("подвижное окно").
Весовой коэффициент имеет значения: 0; 0,5; 1,0 в зависимости от качества отметки от ВС на экране отображения радиолокационной информации в начале и в конце этого интервала. Пример определения весовых коэффициентов и вычисление вероятности обнаружения РЛС для конкретной совокупности отметок от ВС (целей) по цифровому выходу РЛС приведен в пункте 3 приложения N 2.
Вероятность обнаружения РЛС на начальном участке наблюдения (первые пять интервалов) определяется сложением весового коэффициента рассматриваемого интервала (центр "подвижного окна") с весовыми коэффициентами максимально возможного количества предыдущих интервалов и оставшихся последующих интервалов из расчета общего количества интервалов наблюдения, равных десяти (среднеарифметическое значение из десяти отсчетов).
Вероятность обнаружения РЛС на конечном участке наблюдения (последние пять интервалов) определяется сложением весового коэффициента рассматриваемого интервала (центра "подвижного окна") с весовыми коэффициентами максимально возможного количества последующих интервалов и оставшихся предыдущих интервалов из расчета общего количества интервалов наблюдения, равных десяти (среднеарифметическое значение из десяти отсчетов).
Суммарная вероятность обнаружения ВС на всем интервале наблюдения (дальности действия РЛС) при полетах "ОТ" и "НА" РЛС рассчитывается по формуле:
![]() где
где
![]() - суммарная вероятность обнаружения ВС;
- суммарная вероятность обнаружения ВС;
Pi - значения вероятностей обнаружения цели при полетах ВС "ОТ" РЛС;
Pj - значения вероятностей обнаружения цели при полетах ВС "НА" РЛС;
(n + m) - общее количество наблюдений при полетах "ОТ" и "НА" РЛС.
По результатам расчетов выполняется построение графика зависимости вероятности обнаружения (Р) от дальности (Д). Для построения графика Р = f (Д) используются значения вероятностей обнаружения каждого интервала наблюдения ("подвижного окна").
По этим графикам (Р = f(Д) определяется значение максимальной дальности действия РЛС (Д![]() ) Для каждой высоты полета ВС при заданной по эксплуатационной документации РЛС вероятности обнаружения цели (ВС).
) Для каждой высоты полета ВС при заданной по эксплуатационной документации РЛС вероятности обнаружения цели (ВС).
Минимальная дальность действия РЛС (Д![]() ) для каждой высоты полета ВС определяется по пропаданию или появлению отметки от ВС на экране отображения радиолокационной информации при полетах ВСЛ точно над позицией установки РЛС путем усреднения результатов, полученных при всех полетах.
) для каждой высоты полета ВС определяется по пропаданию или появлению отметки от ВС на экране отображения радиолокационной информации при полетах ВСЛ точно над позицией установки РЛС путем усреднения результатов, полученных при всех полетах.
Аналогичным образом определяются вероятностные характеристики прохождения дополнительной информации. При сопровождении ВС в каждом цикле обзора фиксируются: наличие, отсутствие и достоверность информации отдельно по номеру борта и высоте полета ВС. Проверка выполняется при работе РЛС отдельно в режиме "УВД" и в режиме "RBS" (общее число оборотов антенны РЛС составляет не менее 500 по каждому из режимов).
Вероятность прохождения правильной дополнительной информации определяется по формуле:
 , где
, где
Р![]() - вероятность прохождения правильной дополнительной информации;
- вероятность прохождения правильной дополнительной информации;
N![]() - общее число оборотов антенны за время наблюдения по каждому виду информации;
- общее число оборотов антенны за время наблюдения по каждому виду информации;
N![]() - число оборотов антенны, при которых отсутствовала соответствующая дополнительная информация;
- число оборотов антенны, при которых отсутствовала соответствующая дополнительная информация;
N![]() - число оборотов антенны, при которых получена ложная информация.
- число оборотов антенны, при которых получена ложная информация.
Вероятность прохождения ложной информации определяется по формуле:
![]() , где
, где
Р![]() . - вероятность прохождения ложной информации;
. - вероятность прохождения ложной информации;
N![]() - общее число оборотов антенны за время наблюдения по каждому виду информации;
- общее число оборотов антенны за время наблюдения по каждому виду информации;
N![]() - число оборотов антенны, при которых получена ложная информация.
- число оборотов антенны, при которых получена ложная информация.
При вводе РЛС в эксплуатацию графики зависимости вероятности обнаружения радиолокационной станции от дальности (Р = f(Д) на заданной высоте полета прилагаются к акту летной проверки.
72. Зона действия и вероятность правильного обнаружения первичных и вторичных РЛС с использованием информации, получаемой при наблюдении за реальным воздушным движением, определяется по десятикилометровым участкам ("подвижное окно") до границ зоны видимости или границ зоны ответственности службы УВД в соответствии с методикой, приведенной в пункте 29.
При проверке зон видимости РЛС по вторичному каналу, кроме вычисления вероятности обнаружения РЛС по десятикилометровым участкам ("подвижное окно"), подсчитываются средние вероятности обнаружения РЛС по каждому ВС и по всем ВС (целям) на контролируемом направлении воздушного движения.
Вероятность обнаружения конкретного ВС (Р![]() ) вычисляется по формуле:
) вычисляется по формуле:
 где
где
nk - число обзоров антенны РЛС по данному (k-му) ВС (не менее 40);
![]()
Средняя вероятность обнаружения РЛС по всем ВС (Рср.) вычисляется по формуле:
 где
где
![]()
N - общее количество обзоров антенны РЛС по всем ВС.
Далее проводится поочередное сравнение средней вероятности обнаружения по всем ВС (Р![]() ) и вероятности обнаружения конкретного ВС (Р
) и вероятности обнаружения конкретного ВС (Р![]() ) для выявления бортовых приемоответчиков с заниженными характеристиками, для которых Pk
) для выявления бортовых приемоответчиков с заниженными характеристиками, для которых Pk![]() меньше Р
меньше Р![]() более чем на 12%.
более чем на 12%.
Построение диаграмм видимости РЛС выполняется на основе расчета вероятности обнаружения для данных отрезков дальностей видимости радиолокатора (Р![]() ) по формуле:
) по формуле:
 где
где
m - число обзоров антенны РЛС по всем ВС, соответствующее данному отрезку зоны видимости, при этом из рассмотрения исключаются ВС с заниженными характеристиками ответчиков.
По результатам расчетов выполняется построение диаграммы видимости РЛС для данной высоты: по оси абсцисс откладывается дальность, а по оси ординат - вероятность обнаружения, соответствующая каждому отрезку дальности.
При проверке прохождения дополнительной информации по реальному воздушному движению (рейсовым ВС), кроме подсчета вероятности прохождения правильной дополнительной информации для всех ВС, вычисляется вероятность прохождения правильной дополнительной информации для каждого ВС (Pnk) по формуле:
![]() , где
, где
n![]() - число обзоров, когда отсутствовала дополнительная информация по данному (k-му) ВС;
- число обзоров, когда отсутствовала дополнительная информация по данному (k-му) ВС;
n ![]() - число обзоров, когда получена ложная информация по данному (k-му) ВС;
- число обзоров, когда получена ложная информация по данному (k-му) ВС;
n - общее число обзоров наблюдения за данным (k-м) ВС.
По результатам вычислений проводится последовательное сравнение вероятности прохождения правильной дополнительной информации для каждого ВС (Рnk) и вероятности прохождения правильной дополнительной информации (Р![]() ) для выявления бортовых приемоответчиков с заниженными характеристиками, для которых P
) для выявления бортовых приемоответчиков с заниженными характеристиками, для которых P![]() меньше Р
меньше Р![]() более чем на 12%.
более чем на 12%.
Далее вычисляется средняя вероятность прохождения правильной дополнительной информации для всех ВС (Р'ср.), исключая из рассмотрения ВС с заниженными характеристиками бортовых приемоответчиков по формуле:
 где
где
![]()
N - общее количество обзоров по всем ВС.
При проверке потенциальных харктеристик РЛС (дальности действия) с использованием информации, получаемой при наблюдении за реальным воздушным движением, рекомендуется применять способ определения вероятности обнаружения по участкам равной протяженности (расстояния) проверяемого направления воздушного движения (трассы, коридора). Для этого:
проверяемое направление воздушного движения разбивается на участки равной протяженности по 30-80 км;
определяется вероятность обнаружения для каждого ВС на выбранном участке;
определяется среднее значение вероятности обнаружения по всем ВС на выбранном участке.
определяются ВС, вероятность обнаружения которых ниже среднего значения на выбранном участке;
определяется зависимость вероятности обнаружения ВС от дальности с помощью "подвижного окна" и применением весовых коэффициентов в соответствии с методикой, приведенной в пункте 29. Из анализа исключаются ВС, вероятность обнаружения которых меньше среднего значения вероятности на проверяемом направлении.
Пример определения потенциальных характеристик РЛС (дальности действия) по участкам равной протяженности проверяемого направления воздушного движения (трассы, коридора) приведен в пункте 4 приложения N 2.
73. Среднеквадратическая ошибка измерения координат ВС на экране отображения радиолокационной информации с использованием ВСЛ, оборудованного спутниковой навигационной системой - ГЛОНАСС/GPS, определяется при маневрировании ВСЛ по прямолинейным участкам воздушных трасс максимально приближенным к радиальным. Данный метод рекомендуется как приоритетный.
Перед выполнением этой проверки на позиции РЛС устанавливается наземная станция поправок из комплекта АЛК ВСЛ на все время летной проверки, или БО АЛК совместно с представителями ИТП РЛС снимаются координаты места установки АФУ проверяемого радиолокатора, или для определения координат места установки АФУ РЛС осуществляется полет ВСЛ со снижением до минимально безопасной высоты в соответствии с требованиями аэронавигационного паспорта аэродрома/аэроузла (инструкции по производству полетов) с проходом ВС точно над позицией размещения РЛС.
После определения координат места установки АФУ РЛС одним из вышеперечисленных способов выполняется полет ВСЛ по воздушной трассе (маршруту) в направлении "ОТ" ("НА") РЛС. В процессе полета представитель испытательной бригады (представитель ИТП РЛС) равномерно через каждые два оборота антенны для трассового радиолокатора (три - для аэродромного) по каналу радиосвязи информирует БО АЛК о местоположении ВСЛ, определяемом по экрану отображения радиолокационной информации, сообщая ему координаты ВСЛ по азимуту ![]() и дальности (d).
и дальности (d).
В моменты получения информации о координатах местоположения ВСЛ бортовой оператор АЛК определяет координаты азимута и дальности ВСЛ с помощью аппаратуры спутниковой навигационной системы - ГЛОНАСС/GPS, фиксирует их в бортовом журнале и делает отметки соответствующих явлений на регистрирующей аппаратуре.
Среднеквадратичная ошибка определения азимута ![]() или дальности (d) рассчитывается по формуле:
или дальности (d) рассчитывается по формуле:
![]() , где
, где
n - общее число независимых измерений азимута или дальности для всех выбранных объектов;
![]() - абсолютная погрешность измерений азимута (дальности);
- абсолютная погрешность измерений азимута (дальности);
x![]() - азимут или дальность объекта, определенные топографическим методом, относительно АФУ РЛС;
- азимут или дальность объекта, определенные топографическим методом, относительно АФУ РЛС;
x![]() - результат i-ro измерения азимута или дальности.
- результат i-ro измерения азимута или дальности.
Среднеквадратическая ошибка определения координат ВС по выходу с АПОИ для ОРЛ-А по азимуту составляет не более 0,4°, по дальности - не более 200 м, для ОРЛ-Т (первичного и вторичного) по азимуту - не более 0,25°, по дальности - не более 300 м и для вторичного обзорного радиолокатора по азимуту - не более 0,2°, по дальности - не более 200 м.
74. Среднеквадратическая ошибка измерения координат ВС (цели) по "привязанным" к местности геодезическим знакам (контрольным ориентирам) определяется при полетах ВСЛ точно над контрольным ориентиром (геодезическим знаком) на минимально возможной высоте, но не ниже безопасной, на которой возможно наблюдение за отметкой от ВС на экране отображения радиолокационной информации проверяемой РЛС. Над каждым контрольным ориетиром (геодезическим знаком) выполняется не менее четырех проходов ВС.
Схема маневрирования ВСЛ при проходе над контрольными ориентирами (геодезическими знаками) приведена на рисунке 15 приложения N 1.
Подготовка к полету включает уточнение истинных значений координат азимута (![]() ) и дальности (do) каждого из выбранных контрольных ориентиров относительно места установки АФУ РЛС.
) и дальности (do) каждого из выбранных контрольных ориентиров относительно места установки АФУ РЛС.
Момент прохода ВСЛ над контрольным ориентиром БО АЛК фиксирует и подает команду "ОТСЧЕТ" на землю. По этой команде представитель испытательной бригады (представитель ИТП РЛС) на экране отображения радиолокационной информации считывает координаты ВСЛ по азимуту (![]() и дальности (d) и регистрирует их в рабочем журнале для последующего анализа.
и дальности (d) и регистрирует их в рабочем журнале для последующего анализа.
Среднеквадратическая ошибка определения азимута (![]() или дальности (d) рассчитывается по формуле:
или дальности (d) рассчитывается по формуле:
![]() , где
, где
n - общее число независимых измерений азимута или дальности для всех выбранных объектов;
![]() - абсолютная погрешность измерений азимута (дальности);
- абсолютная погрешность измерений азимута (дальности);
x![]() - азимут или дальность объекта, определенные топографическим методом, относительно РЛС;
- азимут или дальность объекта, определенные топографическим методом, относительно РЛС;
x![]() - результат i-гo измерения азимута или дальности.
- результат i-гo измерения азимута или дальности.
75. Среднеквадратическая ошибка измерения координат ВС (цели) радиолокационных станций, оснащенных аппаратурой первичной обработки радиолокационной информации, определяется методом сравнения координат отметок от ВС при маневрировании ВСЛ по прямолинейным участкам воздушных трасс, максимально приближенным к радиальным. Из нескольких траекторий этих полетов, данные которых регистрируются по выходу РЛС, анализируются один - два полета ВС с ярко выраженными прямолинейными участками и по этим участкам определяется среднеквадратическая ошибка измерения координат ВС на экране отображения радиолокационной информации для РЛС с цифровым выходом в следующей последовательности:
а) определяется разность значений координат отметки от ВС по азимуту (![]() )
)
2) и дальности (![]() ) в первом (начало наблюдения) и втором обзоре диаграммы направленности антенны РЛС по формулам:
) в первом (начало наблюдения) и втором обзоре диаграммы направленности антенны РЛС по формулам:
![]() ,
,
![]() , где
, где
A![]() и Д
и Д![]() - координаты отметки от ВС по азимуту и дальности в первом обзоре диаграммы направленности антенны РЛС;
- координаты отметки от ВС по азимуту и дальности в первом обзоре диаграммы направленности антенны РЛС;
А![]() и Д
и Д![]() - координаты отметки от ВС по азимуту и дальности во втором обзоре диаграммы направленности антенны РЛС;
- координаты отметки от ВС по азимуту и дальности во втором обзоре диаграммы направленности антенны РЛС;
б) определяется разность значений координат отметки от ВС по азимуту (![]() )
)
3) и дальности (![]() ) во втором и третьем обзоре диаграммы направленности антенны РЛС по формулам:
) во втором и третьем обзоре диаграммы направленности антенны РЛС по формулам:
![]() ,
,
![]() , где
, где
А![]() и Д
и Д![]() - координаты отметки от ВС по азимуту и дальности во втором обзоре диаграммы направленности антенны РЛС;
- координаты отметки от ВС по азимуту и дальности во втором обзоре диаграммы направленности антенны РЛС;
А![]() и Д
и Д![]() - координаты отметки от ВС по азимуту и дальности в третьем обзоре диаграммы направленности антенны РЛС;
- координаты отметки от ВС по азимуту и дальности в третьем обзоре диаграммы направленности антенны РЛС;
в) далее последовательно от обзора к обзору диаграммы направленности антенны РЛС на всем выбранном прямолинейном участке измерений определяется разность значений координат отметки от ВС по азимуту![]() и дальности
и дальности ![]() в n и (n+1) обзоре диаграммы направленности антенны РЛС по формулам:
в n и (n+1) обзоре диаграммы направленности антенны РЛС по формулам:
![]()
![]() , где
, где
An и Дп - координаты отметки от ВС по азимуту и дальности в n обзоре диаграммы направленности антенны РЛС;
An+1 и Дn+1 - координаты отметки от ВС по азимуту и дальности в (n+1) обзоре диаграммы направленности антенны РЛС;
г) определяется величина средней ошибки измерения координат отметки от ВС по азимуту (![]() Aср.) и дальности (
Aср.) и дальности (![]() Дср.) по формулам:
Дср.) по формулам:
 ,
,  , где
, где
n - количество измерений координат отметки от ВС (А, Д) на выбранном прямолинейном участке;
д) определяется величина суммарной ошибки измерения координат отметки от ВС по азимуту (![]() А
А![]() ) и дальности (
) и дальности (![]() Д
Д![]() ) путем нормировки результатов измерений между последовательными обзорами диаграммы направленности антенны РЛС и средними значениями ошибки измерения координат отметки от ВС (Аср., Дср.) по формулам:
) путем нормировки результатов измерений между последовательными обзорами диаграммы направленности антенны РЛС и средними значениями ошибки измерения координат отметки от ВС (Аср., Дср.) по формулам:
![]() ,
,
![]() ;
;
е) среднеквадратическая ошибка измерения координат ВС (![]() ,
,![]() ) на экране отображения радиолокационной информации для РЛС с цифровым выходом определяется по формулам:
) на экране отображения радиолокационной информации для РЛС с цифровым выходом определяется по формулам:
 ,
,  , где
, где
![]() - среднеквадратическая ошибка измерения азимута;
- среднеквадратическая ошибка измерения азимута;
![]() - среднеквадратическая ошибка измерения дальности;
- среднеквадратическая ошибка измерения дальности;
n - количество измерений координат отметки от ВС.
Среднеквадратическая ошибка определения координат ВС по выходу с АПОИ для ОРЛ-А по азимуту составляет не более 0,4°, по дальности - не более 200 м, для ОРЛ-Т (первичного и вторичного) по азимуту - не более 0,25°, по дальности - не более 300 м и для вторичного обзорного радиолокатора по азимуту - не более 0,2°, по дальности - не более 200 м.
76. Эффективность работы систем подавления боковых лепестков диаграммы направленности антенны РЛС и переотраженных сигналов определяется при выполнении ВСЛ:
радиальных полетов "ОТ" и "НА" РЛС по воздушным трассам (коридорам) в диапазоне высот от 2000 до 6000 м;
полетов с набором высоты и со снижением (по командам диспетчера УВД);
орбитальных полетов радиусом 50-70 км от АФУ РЛС на высотах в интервале от 4000 до 6000 м.
Проверка работы систем подавления сигналов по боковым лепесткам диаграммы направленности антенны осуществляется при радиальных полетах ВС относительно места установки АФУ РЛС. На РЛС включаются системы подавления по запросу и ответу, а также ВАРУ в приемных устройствах радиолокационной станции в соответствии с эксплуатационной документацией на проверяемый тип РЛС.
Визуальным наблюдением на экране отображения радиолокационной информации диспетчера УВД оцениваются:
наличие координатной отметки от ВСЛ в направлении главного луча диаграммы направленности антенны;
отсутствие ложных отметок от боковых лепестков диаграммы направленности антенны во всей зоне действия РЛС.
При наличии ложных отметок в одном из режимов работы РЛС принимаются меры для их исключения в соответствии с эксплуатационной документацией на конкретный тип РЛС.
Проверка работы систем подавления сигналов, переотраженных от местных предметов, осуществляется при орбитальных полетах ВСЛ.
По экрану отображения радиолокационной информации диспетчера УВД проверяются наличие (отсутствие) ложных переотраженных отметок от ВС (цели) и "привязанных" к ним формуляров сопровождения. При наличии ложных переотраженных отметок принимаются меры для их исключения в соответствии с эксплуатационной документацией на конкретный тип РЛС.
77. Зона действия двух посадочных курсов проверяется при маневрировании ВСЛ по схеме выполнения предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с основного и второго направлений посадки. В процессе полета по экрану отображения радиолокационной информации диспетчера УВД оцениваются участки пропадания отметок от ВС (при наличии) и точность определения координат, фиксируется количество обзоров диаграммы направленности антенны РЛС, в течение которых отметка от ВС не наблюдалась, а также фиксируется правильность прохождения дополнительной информации.
По результатам летной проверки зоны действия двух посадочных курсов отрабатывается схема, на которую наносятся:
схемы захода ВС на посадку в соответствии с аэронавигационным паспортом аэродрома/аэроузла (инструкцией по производству полетов);
расчетная точка начала снижения;
позиции установки ДПРМ, БПРМ и ВПП;
километровые отметки на участке маршрута от порога ВПП до выхода ВС из четвертого разворота с их оцифровкой (порог ВПП - 0; 2; 4; 6; 8; 10; 12 км);
участки пропадания отметки от ВС (при наличии).
Эта схема прилагается к отчету по летной проверке РЛС при вводе в эксплуатацию и служит подтверждением правильности нанесения графической информации на экраны отображения радиолокационной информации в соответствии с требованиями аэронавигационного паспорта аэродрома/аэроузла (инструкции по производству полетов).
По каждой схеме захода ВС на посадку выполняется не менее двух заходов ВСЛ по первичному и вторичному каналам (отдельно в режиме "УВД" и режиме "RBS") при работе на основную и резервную антенны или на одну антенну для первого и второго комплектов оборудования РЛС.
78. Зона действия РЛС в зонах ожидания аэродрома проверяется при маневрировании ВСЛ по всем схемам этих зон в соответствии с требованиями аэронавигационного паспорта аэродрома/аэроузла (инструкции по производству полетов) на установленных высотах пилотирования ВС. По результатам проверки отрабатывается схема с указанием участков пропадания отметок от ВС (при наличии), а также фиксируется правильность прохождения дополнительной информации.
По каждой схеме зон ожидания, на каждой высоте маневрирования ВС выполняется по два захода ВСЛ по первичному и вторичному каналам (отдельно в режиме "УВД" и режиме "RBS") при работе РЛС на основную и резервную антенны или на одну антенну для первого и второго комплектов оборудования РЛС.
79. Проверка точности совмещения координат отметок от ВС (цели) первичного и вторичного каналов РЛС осуществляется по экрану отображения радиолокационной информации диспетчера УВД визуально при минимальном масштабе экрана со смещением центра изображения на край экрана и проводится в комплексе с полетами ВСЛ по определению зоны действия РЛС.
Под точностью совмещения координатных отметок первичного и вторичного каналов (без учета ошибок бортового приемоответчика) понимается расстояние и угол между центрами координатных отметок.
Точность совмещения координатных отметок первичного и вторичного каналов РЛС по азимуту и дальности (TОшибка! Ошибка внедренного объекта.) определяется как среднеарифметическое значение из десяти отсчетов на всем экране отображения радиолокационной информации по формуле:
 , где
, где
Т![]() - точность совмещения координатных отметок от ВС (цели) первичного и вторичного каналов РЛС по азимуту и дальности, мм;
- точность совмещения координатных отметок от ВС (цели) первичного и вторичного каналов РЛС по азимуту и дальности, мм;
T![]() - расстояние или угол между центрами координатных отметок первичного и вторичного каналов, мм.
- расстояние или угол между центрами координатных отметок первичного и вторичного каналов, мм.
Перечень требований ИКАО к летной проверке РЛС приведен в приложении N 4, а формы отчета о летной проверке РЛС - в приложении N 6.
VII. Методики летных проверок параметров и характеристик
авиационной воздушной электросвязи
80. Летная проверка параметров и характеристик средств авиационной воздушной электросвязи (далее - АВЭС) ВСЛ может совмещаться с проверкой наземных средств радиотехнического обеспечения полетов, расположенных на данном аэродроме.
Допускается летные проверки АВЭС проводить транспортными ВС.
В зависимости от назначения средства авиационной воздушной электросвязи имеют различную зону действия, т.е. радиус их действия может составлять от 9,3 км (5,0 м.миль) до 370 км (200 м.миль).
При вводе средств АВЭС в эксплуатацию проводится определение зоны действия средств АВЭС на соответствующих высотах полета ВС в зависимости от назначения радиостанции и возможность использования средства АВЭС на данном аэродроме (оценивается полетопригодность).
Перед летной проверкой:
расчетным путем строится график дальности устойчивой двусторонней радиосвязи проверяемого средства авиационной воздушной электросвязи с учетом углов закрытия, который корректируется (при необходимости) по результатам летной проверки и отработанный вариант этого графика прилагается к отчету о летной проверке соответствующего средства АВЭС;
бортовая радиостанция, по сигналам которой оцениваются параметры и качество связи средств АВЭС (наземных ретрансляторов АВЭС), проверяется (калибруется) в соответствии с требованиями эксплуатационной документации на данный тип радиостанции (Единым регламентом технической эксплуатации на данный тип ВС) и протокол этой проверки прилагается к акту летной проверки средств АВЭС (наземных ретрансляторов);
экипаж ВС, выделенного для летной проверки АВЭС, согласовывает свои действия (прорабатывает полетное задание) с инженерно-техническим персоналом служб ЭРТОС и УВД.
Радиостанции аварийной радиосети (121,5 МГц) проверяются на любой другой частоте, закрепленной за организацией, на эксплуатации которой находятся средства АВЭС.
Летная проверка радиосети передачи метеоинформации выполняется экипажем воздушного судна и передается по диспетчерским каналам для регистрации.
81. Зона действия каждого средства радиосети АВЭС с использованием ВСЛ определяется на соответствующем пункте УВД в зоне контролируемого им воздушного пространства во время радиообмена по установленной фразеологии между бортовым инженером-оператором АЛК (штурманом, вторым пилотом ВСЛ) и диспетчером УВД.
АЛК работает в режиме проверки АВЭС, на радиостанции устанавливается необходимая частота радиосвязи, и проводится не менее пяти сеансов радиообмена бортового инженера-оператора АЛК (штурмана, второго пилота) с наземным пунктом связи (диспетчером УВД) в каждой зоне контролируемого воздушного пространства.
В каждом сеансе радиосвязи диспетчеру УВД передается следующая информация: регистрационный (бортовой) номер ВСЛ (позывной командира ВС), координаты (удаление, высота полета, азимут/пеленг, для радиосети руления указывается местоположение ВСЛ на летном поле).
Диспетчер УВД подтверждает получение соответствующей информации и проводит оценку смысловой разборчивости речи.
Прослушивается метеоинформация и проводится оценка смысловой разборчивости сообщения.
Зона действия АВЭС определяется удалением ВСЛ от аэродрома проверки (позиции установки ретранслятора АВЭС), измеряемым по индикаторам АЛК (ГЛОНАСС/GPS, РСБН, РМД/DME) для соответствующей высоты полета, при которой разборчивость сообщения оценивается не ниже "удовлетворительно", т.е. без переспросов и повторений.
При отсутствии на аэродроме РСБН (РМД/DME) дальность ВСЛ от контрольно-диспетчерского пункта определяется по экрану индикатора РЛС или по карте.
Конкретное значение дальности радиосвязи "воздух-земля" на высоте 1000 м, как правило, приводится в формуляре радиостанции.
82. Зона действия каждого средства радиосети АВЭС с использованием транспортного ВС определяется на соответствующем пункте УВД в зоне контролируемого им воздушного пространства во время радиообмена по установленной фразеологии между экипажем ВС, выделенного для летной проверки АВЭС и диспетчером УВД.
В каждом сеансе радиосвязи диспетчеру УВД передается следующая информация: регистрационный (бортовой) номер ВС (позывной командира ВС), координаты (удаление, высота полета, азимут/пеленг, для радиосети руления указывается местоположение ВС на летном поле).
Диспетчер УВД подтверждает получение соответствующей информации и проводит оценку смысловой разборчивости сообщения, которая оценивается не ниже "удовлетворительно", т.е. без переспросов и повторений.
83. Возможность использования средств АВЭС на данном аэродроме (полетопригодность) определяется в комплексе с полетами по проверке зоны действия (дальности действия) средств АВЭС.
На борту ВС настраивается радиостанция, устанавливается необходимая частота радиосвязи.
При каждом сеансе радиосвязи на борту ВС между диспетчером УВД и экипажем ВС оценивается взаимовлияние соседних радиостанций. При обнаружении мешающих факторов: шорохи, гул, посторонняя информация, не относящаяся к переговорам с диспетчером данного канала связи, - БО АЛК (экипаж ВС) сообщает об этом диспетчеру (абоненту, участвующему в проверке).
Качество радиосвязи "воздух-земля" считается "удовлетворительным", если принимаемая фразеология не содержит мешающих факторов и воспринимается без переспросов и повторений.
Перечень требований ИКАО к летной проверке АВЭС приведен в приложении N 4, а форма отчета о летной проверке АВЭС - в приложении N 6.
VIII. Методики летных проверок параметров и характеристик
систем светосигнального оборудования аэродромов
84. Системы светосигнального оборудования аэродромов (далее - системы ССО) обеспечивают световое обозначение ВПП и ее участков, подходов к ней, рулежных дорожек (далее - РД) и их расположение, а также управление движением по аэродрому с целью предоставления пилотам визуальной информации при выполнении взлета, посадки и рулении воздушных судов.
85. В аэропортах гражданской авиации на эксплуатации находятся системы огней высокой интенсивности (далее - ОВИ-I, II, III) и системы огней малой интенсивности (далее - ОМИ), которые совместно с радиотехническими средствами посадки предназначены для обеспечения захода ВС на посадку, посадки, взлета и руления воздушных судов ночью, а также днем в условиях ограниченной видимости.
86. Летные проверки систем светосигнального оборудования аэродромов рекомендуется проводить в сумерки или в темное время суток при видимости не менее 5 км и высоте нижней границы облачности не менее 300 м.
При летных проверках систем ССО полеты ВСЛ осуществляются по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с последующим снижением по глиссаде и уходом на второй круг.
87. В зависимости от технических характеристик аппаратуры летного контроля ВСЛ наблюдение и регистрация огней системы ССО проводятся: визуально, по фотографии, по экрану дисплея и т.д.
88. Схемы расположения и цвета огней различных систем светосигнального оборудования аэродромов гражданской авиации приведены в приложении N 3.
Перечень требований ИКАО к летной проверке систем ССО приведен в приложении N 4, а формы отчета о летной проверке - в приложении N 6.
89. Для получения объективной оценки пригодности к эксплуатации систем светосигнального оборудования при проведении летных проверок систем ОМИ и ОВИ осуществляется фотографирование (запись на видеокамеру, регистрация на бумаге или магнитном носителе видеоинформации) огней приближения и ВПП.
Фотографирование (регистрация на бумаге или магнитном носителе видеоинформации, запись на видеокамеру) выполняется при заходе ВСЛ на посадку в течение времени, необходимого для получения полных сведений об огнях приближения и ВПП.
При использовании телевизионных устройств для получения объективной оценки пригодности к эксплуатации системы ССО регистрация производится в соответствии с возможностями скорости печати применяемого типа принтера.
Проявленная фотопленка с указанием даты летной проверки и номера ВСЛ, на котором выполнялась проверка, хранится в организации, осуществляющей эксплуатацию системы ССО (службе ЭСТОП), не менее одного года.
Для фотопечати отбираются по два - три наиболее качественных негатива объективной оценки системы ССО. Фотографии системы ССО форматом не менее 10х15 см (распечатки) прикладываются к акту летной проверки, на обратной стороне которых указываются наименование аэродрома, направление посадки, дата летной проверки, фамилия БО АЛК, выполнявшего проверку, и ставится печать организации, осуществляющей эксплуатацию системы ССО.
90. При летной проверке схемы расположения огней системы ССО выполняется сопоставление фактического состава, расположения и цвета огней системы ССО с требованиями нормативно-технических документов.
Проверка схемы расположения огней системы ССО выполняется следующим образом: диспетчер посадки включает огни на ту ступень яркости, при которой не создается слепящего действия членам экипажа ВСЛ при данных метеоусловиях для огней:
системы ОМИ- 2-я кнопка/группа;
системы ОВИ - 3-я (4-я) кнопка/группа.
Проверка рулежного ССО осуществляется путем визуального наблюдения за наличием, цветом огней и аэродромных знаков при рулении ВСЛ по рулежной дорожке и ВПП перед взлетом и после посадки.
При рулении ВСЛ по РД и выруливании ВСЛ с РД на ВПП, с ВПП на РД, с одной рулежной дорожки на другую, с рулежной дорожки на перрон проверяются аэродромные знаки, огни маркировки критической зоны, боковые и осевые рулежные огни.
В процессе проверки рулежного светосигнального оборудования определяется отсутствие заметных отклонений в расположении огней и аэродромных знаков, фиксируются пропуски, цвет огней и аэродромных знаков.
Проверка огней приближения, световых горизонтов и входных огней осуществляется при заходах ВСЛ на посадку по схеме предпосадочного маневра, который является типовым для данного аэродрома с последующим снижением по глиссаде с удаления 4-5 км от порога ВПП и уходом на второй круг, при этом осуществляется фотографирование огней системы ССО в соответствии с требованиями, приведенными в пункте 89 (по экрану дисплея с фиксацией на бумаге или магнитном носителе видеоинформации).
По полученным фотографиям определяется соответствие расположения огней системы ССО схеме, утвержденной для данного направления посадки аэродрома. Соответствие цвета огней в подсистемах может определяться визуальной оценкой.
Огни системы ССО считаются исправными и правильно отрегулированными, если отсутствуют пропуски огней или огни, резко отличающиеся от других по яркости, а аэродромные знаки не создают слепящего действия и их символы четко различаются с расстояния 100-125 м.
91. Объем негорящих (отсутствующих) огней в подсистемах системы ССО определяется следующим образом: диспетчер посадки включает огни согласно требованиям, приведенным в пункте 90. Визуальное наблюдение и фотографирование огней в подсистемах осуществляется согласно требованиям, приведенным в пунктах 89 и 90. Визуально или по фотографии (экрану дисплея) определяются количество негорящих (отсутствующих) огней и их объем в процентах, а также отсутствие или затенение двух огней подряд в соответствующей подсистеме по формуле:
![]() , где
, где
X - количество негорящих (отсутствующих) огней системы ССО;
Z - общее количество огней системы ССО.
Объем негорящих (отсутствующих) огней в подсистемах системы ССО соответствует требованиям, приведенным в таблице 6.1 приложения N 4.
92. Оценка яркости огней в подсистемах системы ССО выполняется следующим образом: диспетчер посадки включает огни согласно требованиям, приведенным в пункте 90. Визуальное наблюдение и фотографирование огней в подсистемах системы ССО осуществляется согласно требованиям, приведенным в пунктах 89 и 90. Визуально или по фотографии (экрану дисплея) определяются наличие и место расположения огней с большей или меньшей яркостью от среднего фона светосигнальной картины.
Яркость огней в подсистемах системы ССО считается правильно отрегулированной, если отсутствуют огни, резко отличающиеся от других по яркости, а аэродромные знаки не создают слепящего действия и их символы четко различаются с расстояния 100-125 м.
93. Световая маркировка осевых огней ВПП проверяется следующим образом: диспетчер посадки включает огни согласно требованиям, приведенным в пункте 90. Визуальное наблюдение и фотографирование осевых огней ВПП осуществляется согласно требованиям, приведенным в пунктах 89 и 90. В процессе захода ВСЛ оцениваются соответствие цвета и чередование цвета огней на участках:
900-300 м от конца ВПП;
300 м от конца ВПП;
на остальной части ВПП.
По команде БО АЛК с борта ВСЛ диспетчер посадки дает указание инженерно-техническому персоналу ТП-ОВИ на отключение одной из кабельных линий питания осевых огней ВПП.
Визуальное наблюдение и фотографирование осевых огней ВПП осуществляется согласно требованиям, приведенным в пунктах 89 и 90. При этом оцениваются сохранение цветовой маркировки осевых огней и равномерность расстояния между огнями на участке 900-300 м от конца ВПП.
Световая маркировка осевых огней ВПП соответствует требованиям, приведенным в таблице 6.1 приложения N 4.
94. Работа устройства дистанционного управления проверяется следующим образом: диспетчер посадки по команде БО АЛК последовательно переключает группы огней с первой по последнюю кнопки (группу), а затем - с последней по первую. Каждый цикл переключений выполняется по два - три раза в течение одного захода ВСЛ с выдержкой 2-3 секунды между включениями кнопок (групп).
Визуально с борта ВСЛ наблюдается соответственно увеличение или уменьшение яркости огней в подсистемах системы ССО.
Устройство дистанционного управления считается правильно отрегулированным, если изменение яркости огней в подсистемах происходит без темнового промежутка.
95. Правильность набора групп и яркости огней системы ССО проверяется следующим образом: диспетчер посадки осуществляет переключение огней в подсистемах согласно требованиям, приведенным в пункте 90, и сообщает на борт ВСЛ номер кнопки/группы включенных огней.
Визуально проверяется правильность включения групп огней в соответствии с таблицами 1, 2, 3 приложения N 4, а также увеличение или уменьшение яркости тех огней, которые предусмотрены для каждой кнопки (группы) на ПОУ диспетчера посадки.
96. Время переключения огней системы ССО при переходе на автономный источник электроснабжения определяется следующим образом: по команде БО АЛК диспетчер посадки дает указание инженерно-техническому персоналу ТП-ОВИ (ТП-ОМИ) о переводе электроснабжения ОВИ с одного внешнего источника на другой, а затем - на автономный источник электроснабжения (ДГА). Для системы ОМИ электроснабжение переводится только на ДГА.
Хронометраж выполняется БО АЛК по секундомеру. В момент погасания светосигнальной картины (или ее части) включается секундомер, а при восстановлении светосигнальной картины - выключается. Показание секундомера соответствует времени переключения огней системы ССО при переходе с одного внешнего источника на другой (автономный) источник электроснабжения.
Время перехода с одного внешнего источника на другой (автономный) источник приведено в таблице 6.1 приложения N 4.
97. Система визуальной индикации глиссады PAPI (АРAPI) устанавливается, как правило, с левой стороны ВПП по заходу ВС на посадку. Система PAPI (АРAPI) используется для визуального информирования пилота о положении ВС относительно заданной глиссады снижения при заходе на посадку в дневных и ночных условиях.
В систему PAPI входит 4 огня (АРAPI - 2 огня) в виде флангового горизонта, установленных на линии, перпендикулярной оси ВПП. Огни в горизонте системы PAPI устанавливаются с интервалами 9 м (системы АРAPI - 6 м), ближний к ВПП огонь находится на расстоянии 15 м от кромки ВПП (система АРAPI - 10 м от кромки ВПП).
Для определения величины углов системы визуальной индикации глиссады PAPI (APAPI) - глиссадных огней (ГО) осуществляется полет ВСЛ с выполнением предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме со снижением по траекториям, отличающимся от номинальной глиссады на углы ![]() 30',
30', ![]() 10' для системы PAPI и
10' для системы PAPI и ![]() 15' для системы АРAPI, до высоты принятия решения - 60 м с последующим уходом на второй круг.
15' для системы АРAPI, до высоты принятия решения - 60 м с последующим уходом на второй круг.
Диспетчер посадки включает систему визуальной индикации глиссады PAPI (АРAPI) в соответствии с таблицей группового набора огней по ступеням яркости для данного направления захода ВС на посадку (аэродрома).
АЛК работает в режиме определения угла наклона глиссады в соответствии с РЭ АЛК и использованием информации о траектории маневрирования ВСЛ от наземной СТИ, которая работает в режиме слежения "точно" по углу места (каналу глиссады) или от бортовой СНС. Исходный угол глиссады на наземной СТИ устанавливается на 30' выше номинального угла глиссады для системы PAPI (на 15' выше номинального угла - для системы АРAPI), и осуществляется слежение за носовой частью ВСЛ в автоматическом или ручном режиме.
Измерения выполняют после выхода ВСЛ из четвертого разворота на посадочной прямой, при наличии устойчивой информации о траектории полета ВСЛ, на максимально возможном удалении. Измерения завершают после прохода воздушным судном-лабораторией точки "В" (БПРМ).
При заходе ВСЛ на посадку по системе PAPI выше глиссады на 30' командир ВС (БО АЛК) наблюдает три внешних огня белого цвета и четвертый огонь (внутренний, ближайший к ВПП) попеременно белого или красного цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг (рисунок 5 приложения N 3).
При заходе ВСЛ на посадку по системе АРAPI выше глиссады на 15' командир ВС (БО АЛК) наблюдает внешний огонь белого цвета, внутренний огонь попеременно красного и белого цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг (рисунок 5 приложения N 3).
По команде БО АЛК оператор СТИ в последующих заходах устанавливает значение исходного угла глиссады на аппаратуре СТИ, отличающееся на величину +10', -10', -30' для системы PAPI (-15' для системы АРAPI) от номинального угла глиссады данного направления посадки.
При заходе ВСЛ на посадку по системе PAPI выше глиссады на 10' командир ВС (БО АЛК) наблюдает два внешних огня белого цвета, третий огонь (внутренний) попеременно белого или красного цвета, четвертый огонь (внутренний) красного цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг.
При заходе ВСЛ на посадку по системе PAPI ниже глиссады на 10' командир ВС (БО АЛК) наблюдает первый огонь (внешний) белого цвета, второй огонь (внешний) попеременно белого или красного цвета, два внутренних огня красного цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг.
При заходе ВСЛ на посадку по системе PAPI ниже глиссады на 30' командир ВС (БО АЛК) наблюдает один огонь (внешний) попеременно белого или красного цвета, остальные огни красного цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг.
При заходе ВСЛ на посадку по системе АРАPI ниже глиссады на 15' командир ВС (БО АЛК) наблюдает внешний огонь попеременно красного и белого цвета, внутренний огонь красного цвета и пилотирует ВСЛ таким образом, чтобы во время снижения наблюдалась эта комбинация огней до высоты ухода на второй круг.
В момент точного наблюдения требуемой светосигнальной комбинации огней визуальной индикации глиссады PAPI (APAPI) командир ВС подает команду "ОТСЧЕТ", при этом регистрируются текущие значения угла глиссады (![]() i). В процессе захода ВСЛ выполняется не менее 10 отсчетов.
i). В процессе захода ВСЛ выполняется не менее 10 отсчетов.
По измеренным значениям текущего угла визуальной индикации глиссады (![]() i) вычисляется значение угла данного глиссадного огня (для системы визуальной индикации глиссады PAPI:
i) вычисляется значение угла данного глиссадного огня (для системы визуальной индикации глиссады PAPI: ![]() +30',
+30', ![]() +10',
+10', ![]() -10',
-10', ![]() -30'; для системы визуальной индикации глиссады АРAPI:
-30'; для системы визуальной индикации глиссады АРAPI: ![]() +15',
+15', ![]() -15').
-15').
Результаты измерений используются для составления отчета о проверке правильности установки углов системы визуальной индикации глиссады PAPI (APAPI).
98. Сравнительная оценка траектории полета ВС при заходе на посадку с использованием системы визуальной индикации глиссады (PAPI/APAPI) и глиссады РМС осуществляется при полете ВСЛ по схеме предпосадочного маневра, который является типовым для захода на посадку на данном аэродроме с последующим снижением по глиссаде и дальнейшим уходом на второй круг.
Командир воздушного судна выполняет пилотирование ВСЛ по сигналам РМС инструментальной посадки с точным выдерживанием глиссадной планки пилотажно-навигационного прибора в центре шкалы, при этом второй пилот и БО АЛК наблюдают за комбинацией огней системы визуальной индикации глиссады и фиксируют информацию в бортовом журнале и на регистрирующей аппаратуре АЛК.
При проверке соответствия траектории снижения ВС по системе визуальной индикации глиссады PAPI и глиссаде РМС командир ВС, второй пилот и БО АЛК наблюдают следующую информацию (комбинацию огней) о положении воздушного судна относительно глиссады:
ВС снижается по глиссаде или близко к ней - два огня, расположенные ближе к ВПП, - красные, а два огня, расположенные дальше от ВПП, - белые;
ВС снижается выше глиссады - один огонь, расположенный ближе к ВПП, - красный, а три огня, расположенные дальше от ВПП, - белые; еще выше глиссады - все огни белые;
ВС снижается ниже глиссады - три огня, расположенные ближе к ВПП, - красные, а огонь, расположенный дальше от ВПП, - белый; еще ниже глиссады - все огни красные.
При проверке соответствия траектории снижения ВС по системе визуальной индикации глиссады APAPI и глиссаде РМС командир ВС, второй пилот и БО АЛК наблюдают следующую информацию (комбинацию огней) о положении воздушного судна относительно глиссады:
ВС снижается по глиссаде или близко к ней - один огонь красный и один огонь белый;
ВС снижается выше глиссады - два огня белые;
ВС снижается ниже глиссады - два огня красные.
Измерения величины углов глиссадных огней и сравнительная оценка соответствия траектории снижения ВС по системе визуальной индикации глиссады и глиссаде РМС систем визуальной индикации других типов выполняются аналогично.
VIII. Методики летных проверок параметров и
характеристик схем полетов по приборам
99. Цель летной проверки схем полетов ВС по приборам (далее - ППП/IАР) заключается в определении возможности радионавигационного средства обеспечивать выполнение проверяемой схемы ППП/IАР, пролет препятствий на установленной высоте, а также полетопригодность данной схемы.
К схемам полетов ВС по приборам относятся следующие схемы: воздушных трасс, внетрассовых маршрутов, маршрутов полетов реактивных ВС, захода на посадку по приборам, вылета по приборам, маршрутов прибытия и схемы, которым надлежит следовать при полетах с использованием систем управления полетом (FMS) и глобальной навигационной спутниковой системы (ГЛОНАСС/GNSS). При вводе средств РТОП и связи в эксплуатацию проверка схем полетов по приборам является составной частью процесса летной проверки; кроме того, она входит в периодическую программу летной проверки схем полетов по приборам. На схемах полетов по приборам задаются стандартные маршруты, площадки маневрирования, абсолютные высоты полета и минимумы для захода на посадку при полетах по ППП/IАР.
Для проведения летной проверки схем полетов по приборам необходима следующая информация:
расположение (темплет) препятствий на конечном этапе захода на посадку, полученное с помощью аэрофотосъемки и нанесенное на аэронавигационную карту масштаба М1:200000 или М1:500000, которую можно использовать для навигации, анализа возвышенных участков рельефа, препятствий и их оценки;
утвержденные документы с указанием соответствующих особенностей рельефа и препятствий, которые следует контролировать при выполнении данной схемы полета. Они указываются и четко выделяются на соответствующей карте;
минимальные абсолютные высоты для каждого участка данной схемы полета, которые считаются приемлемыми на основании анализа карт и информации, полученной от базы данных;
подробное описание схемы захода на посадку по приборам;
вид сверху и в вертикальной плоскости графического изображения схемы захода на посадку по приборам;
документы с данными, относящимися к каждой контрольной точке, пересечению и/или схеме полета в зоне ожидания;
сообщения "воздух - земля", передаваемые на каждом участке проверяемой схемы полета;
маркировка аэродрома и специальные местные эксплуатационные приемы, например, приемы снижения шума, нестандартные схемы движения, включение светосигнального оборудования и т.д.
При проведении летной проверки схем полетов по приборам необходимо выполнить следующие проверки:
проверить высоту препятствия, которое используется в качестве основы для расчета минимальной абсолютной высоты пролета для каждого участка ППП/IАР;
произвести оценку безопасности площадей маневрирования для всех видов ВС, для которых предназначена данная схема полета;
проанализировать схему полета по приборам с точки зрения ее сложности и оценить рабочую нагрузку на летный экипаж с целью выявления особых требований, оказывающих отрицательное влияние на безопасность полета;
проверить правильность представляемой информации, ее своевременность и простоту для восприятия;
в случаях, когда это необходимо, проверить наличие и функционирование требуемой маркировки ВПП, светосигнального оборудования и средств связи.
Летная проверка схемы полетов по приборам и подтверждение данных о препятствиях могут проводиться в ходе проверки средства РТОП, обеспечивающего выполнение схемы, при условии, что на протяжении каждого участка схемы (полета ВСЛ) сохраняются визуальные метеорологические условия. При обнаружении в процессе летной проверки новых препятствий выполняющий проверку специалист (пилот-инспектор, БО АЛК) определяет местоположение и высоту каждого нового препятствия и передает эти данные специалисту по схемам ППП/IАР. Разрешение на эксплуатационное использование данной схемы полета не выдается до тех пор, пока специалист по схемам ППП/IАР не завершит анализ схемы и она не будет окончательно отработана и утверждена в установленном порядке.
При определении высоты препятствий или рельефа местности путем летных измерений для получения максимально точных результатов необходимо использовать показания высотомера и опорные значения абсолютной высоты.
Методика определения высоты препятствий отражается в приложении к акту летной проверки.
100. При вводе схемы ППП/IAP в эксплуатацию для подтверждения правильности выбора предлагаемой минимальной высоты пролета препятствий (МОСА) маневрирование ВСЛ осуществляется на каждом маршрутном и конечном участках данной схемы. ВСЛ выполняет пролет этих участков на минимальной абсолютной высоте полета на маршруте (МЕА), используя для пилотирования проверяемое наземное радионавигационное средство.
Для схем вылета по приборам данный участок (участки) оценивается применительно к используемому наземному средству РТОП, контрольной точке или точке с заданной высотой прохода препятствий на маршруте.
Для конечного маршрута прибытия каждый участок оценивается, начиная с точки, где маршрут отклоняется от установленной высоты пролета препятствий, до точки пересечения этого маршрута с установленной схемой захода на посадку.
Проводить периодические летные проверки маршрутных и конечного участков схем полетов по приборам не требуется.
Участок конечного этапа захода на посадку обеспечивает вывод ВС в требуемую точку. Эта точка зависит от типа средства РТОП, обеспечивающего вывод воздушного судна, и определяется специалистом по схемам полетов ППП/IАР.
После летной проверки выбранной точки ее нельзя изменять без согласия специалиста по схемам полетов ППП/IАР.
Если средство РТОП не выводит ВС в установленную точку или если путем регулировки невозможно добиться требуемой юстировки этого средства, то данная схема полетов по приборам пересматривается и проверяется заново.
Для схемы ухода на второй круг оцениваются рассчитанные для данной схемы абсолютные высоты пролета препятствий (ROC/MOC), а также полетопригодность данной схемы для эксплуатационного использования теми типами ВС, для которых она предназначена.
Для зоны захода на посадку по кругу оцениваются нанесенные на схему зоны маневрирования ВС при полете по кругу с точки зрения эксплуатационной безопасности ППП/IAP для каждого типа ВС, а также в правильности указания контрольного препятствия.
Контрольные препятствия на конечных участках схем полетов по приборам подтверждаются визуально при выполнении полета ВСЛ либо путем наблюдения с земли. Если не удается подтвердить с земли, что контрольное препятствие, указанное специалистом по схемам полетов, является самым высоким на данном участке, то выполняющий летную проверку пилот-инспектор (БО АЛК) готовит перечень всех препятствий на данном участке с указанием их местоположения, типа и приблизительной высоты и передает эти данные специалисту по схемам полетов ППП/IAP для их технической оценки. Оценка препятствий проводится только при визуальных метеорологических условиях (ВМУ). Обеспечение эксплуатационной безопасности схем полетов по приборам, критерии их применения и полетопригодность осуществляет выполняющий летную проверку специалист (пилот-инспектор, БО АЛК).
101. Проверка схемы захода на посадку по приборам осуществляется при маневрировании ВСЛ в соответствии требованиями аэронавигационного паспорта аэродрома (инструкции по производству полетов на аэродроме/аэроузле) по траектории захода на посадку на высоте, которая на 30 м (100 фут) ниже установленной минимальной абсолютной высоты снижения. Перед выполнением летной проверки необходимо проанализировать темплет участка конечного этапа захода на посадку на данном аэродроме с целью обнаружения или подтверждения контрольного препятствия для данного участка.
Оценка захода на посадку при использовании проверяемого средства РТОП выполняется при полете на вышеуказанной высоте или на абсолютной высоте ухода на второй круг. Расхождения в результатах проверки или неточные данные передаются специалисту по схемам полетов по приборам для принятия соответствующих мер до ввода данной схемы в эксплуатацию.
102. Для определения минимальной эксплуатационной высоты полета на схеме ППП/IAP проводится летная проверка. Минимальная абсолютная высота на маршруте (МЕА) рассчитывается и публикуется в соответствии с политикой и схемами полетов, принятыми в каждом государстве. Минимальная абсолютная высота определяется на основе минимальной абсолютной высоты пролета препятствий (МОСА), минимальной абсолютной высоты радиоприема (MRA), особенностей воздушного пространства и требований к средствам связи. Если не одна, а несколько из указанных высот оказываются пригодными для выполнения схемы полета, то наибольшая из этих высот, определенная путем летной проверки, устанавливается в качестве минимальной эксплуатационной высоты.
Оценка качества связи "воздух-земля" с проверяемым аэронавигационным средством производится на минимальной абсолютной высоте в контрольной точке начального этапа захода на посадку и на абсолютной высоте ухода на второй круг. В тех случаях, когда для управления воздушным движением требуется непрерывно поддерживать связь на всем протяжении процедуры захода на посадку, в ходе летной проверки необходимо убедиться в обеспечении связи во всей этой зоне.
103. Схемы полетов по приборам, основанные на использовании зональной навигации (RNAV - глобальная навигационная спутниковая система - ГЛОНАСС/GPS, GNSS или система управления полетом - FMS), оцениваются в процессе летной проверки на соответствие требованиям, предъявляемым к безопасности и надежности выполнения полетов. Помимо вышеуказанных требований, в ходе летной проверки таких схем полетов необходимо произвести оценку следующих характеристик:
точность местоположения точек пути - необходимо проверить правильность обозначения и точность местоположения этих точек, нанесенных на проверяемую схему полета, проверить и точно определить районы, в которых контрольные точки смещены;
точность указания пеленга. В случаях, когда это необходимо, следует проверить точность указания пеленга, нанесенного на схему захода на посадку по приборам;
точность указания дальности. В случае использования при летной проверке автоматизированной системы следует проверить точность указания значений дальности, а при выполнении ручных измерений в процессе летной проверки для этого используется местоположение контрольных ориентиров на местности.
104. При введении новых схем захода на посадку по приборам в аэропортах, которые ранее не обслуживали посадки ВС по ППП/IАР, необходимо провести летную проверку пригодности аэродромного светосигнального оборудования в ночное время с тем, чтобы до утверждения минимумов для темного времени суток определить пригодность аэродромных систем ССО для выполнения полетов ВС с использованием этих схем.
В процессе летной проверки системы ССО, обеспечивающей заход на посадку и посадку ВС, необходимо убедиться в том, что система обеспечивает правильное световое обозначение ВПП и ее участков, подходов к ней, рулежных дорожек и их расположение, что светосигнальное оборудование функционирует в соответствии с его эксплуатационными возможностями и что схема освещения местных зон не мешает, не вводит в заблуждение и не приводит к неправильной оценке обстановки на ВПП.
105. По результатам проверки схем полетов по приборам выполняющий летную проверку специалист (пилот-инспектор, БО АЛК) определяет, является ли данная схема полета полетопригодной и безопасной. Если по результатам проверки новая схема полета признана неудовлетворительной, выполняющий летную проверку специалист (пилот-инспектор, БО АЛК) совместно со специалистом по схемам полетов по приборам анализируют выявленные проблемы и формулируют изменения, которые необходимо внести в схему. Если неудовлетворительной признана уже опубликованная схема полета, выполняющий летную проверку специалист принимает меры к тому, чтобы выявленные недостатки были опубликованы в NOTAM, и уведомляет о них специалиста по схемам полетов.
Критерии, используемые при разработке схем ППП/IAP, включают в себя факторы, связанные со сведением к минимуму рабочей нагрузки на летный экипаж, а также с ограниченными возможностями человека. Выполняющий летную проверку специалист (пилот-инспектор, БО АЛК) определяет, является ли схема полета по приборам безопасной с эксплуатационной точки зрения и может ли она быть выполнена одним пилотом с минимальным уровнем квалификации, который пилотирует ВС, оснащенное комплектом приборов для полетов по ППП/IAP, в простых метеорологических условиях (ПМУ), пользуясь стандартной навигационной картой. При вводе в эксплуатацию новой или измененной схемы полета выполняющий летную проверку специалист (пилот-инспектор, БО АЛК) применяет критерии человеческого фактора путем учета следующих характеристик:
схема полета выбирается по возможности простой, чтобы избежать излишней рабочей нагрузки на летный экипаж;
выполняющий летную проверку специалист подтверждает, что демонстрационное выполнение схемы полета соответствует установленным требованиям.
Выполняющий летную проверку специалист (пилот-инспектор, БО АЛК) проверяет и оценивает эксплуатационную безопасность каждого участка схемы полета по приборам в следующих отношениях:
авиационная безопасность схемы полета - необходимо убедиться в том, что данная схема полета соответствует безопасной практике выполнения полетов, четко изложена и требует приемлемого уровня рабочей нагрузки на летный экипаж, связанной с планированием и выполнением необходимых маневров;
маркировка ВПП, системы ССО и средств РТОП и связи - необходимо проверить вышеперечисленное аэродромное оборудование с точки зрения его пригодности для обеспечения выполнения конкретной схемы полета.
Непригодность любого из указанных видов аэродромного оборудования является причиной для отказа от использования данной схемы полета.
После выполнения проверки схемы полетов по приборам и получения данных от всех членов экипажа выполняющий летную проверку специалист (пилот-инспектор) совместно с БО АЛК готовит отчет, документально подтверждающий факт проверки данной схемы полета.
Рекомендуемая форма отчета о летной проверке схем захода ВС по приборам ППП/IAP приведена в приложении N 6.
Приложение N 1
к Методическим рекомендациям
по летным проверкам средств РТОП,
связи и систем ССО
(пп.11-35, 43, 56, 61-66, 71, 74)
|
|
Схемы маневрирования ВСЛ при летной проверке РМС на аэродроме |
|
|
|
|
|
(наименование аэропорта) |
|
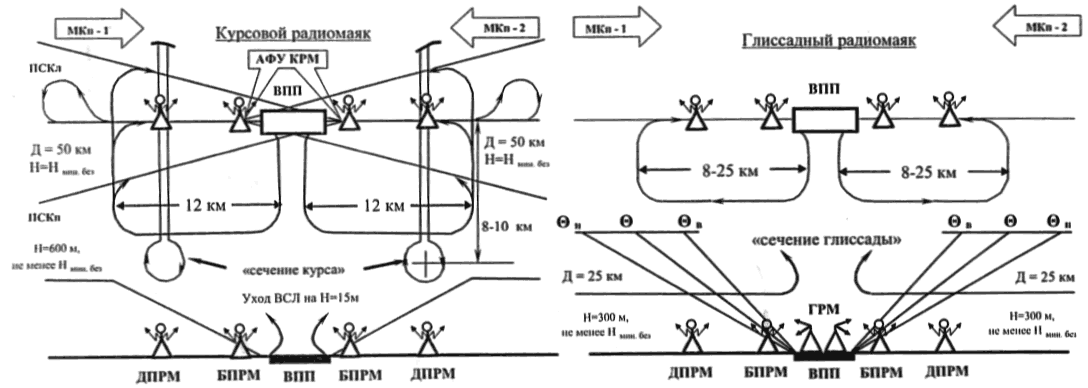
|
|
|
|
|
|
|
Условия выполнения задания |
|
Меры безопасности |
|
1. |
Задание выполнять в соответствии с требованиями ФАП "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). |
1. |
В случае попадания в опасные метеоусловия доложить РП, немедленно выйти из них, выполнение задания прекратить и действовать по указанию руководителя полетов. |
|
2. |
Высота полета не менее минимальной безопасной _____ м. |
2. |
При отказе авиатехники действовать согласно руководству по летной эксплуатации воздушного судна и аэронавигационного паспорта аэродрома/аэроузла (инструкции по производству полетов). |
|
|
Особенности рельефа аэродрома |
3. |
Вести контроль за расходом топлива. При минимальном расчетном остатке топлива выполнение задания прекратить и произвести посадку. |
|
1. |
Длина ВПП _____ м, ширина ВПП _____ м, направление посадки: |
4. |
При выполнении заходов, имитирующих посадку, снижаться не ниже 15 м. |
|
2. |
В секторе захода на посадку с МКп - 1 на А =___° и Д =___км проходит ЛЭП-500; |
5. |
Выдерживать заданный режим полета и соблюдать правила полетов в зонах с особым режимом. |
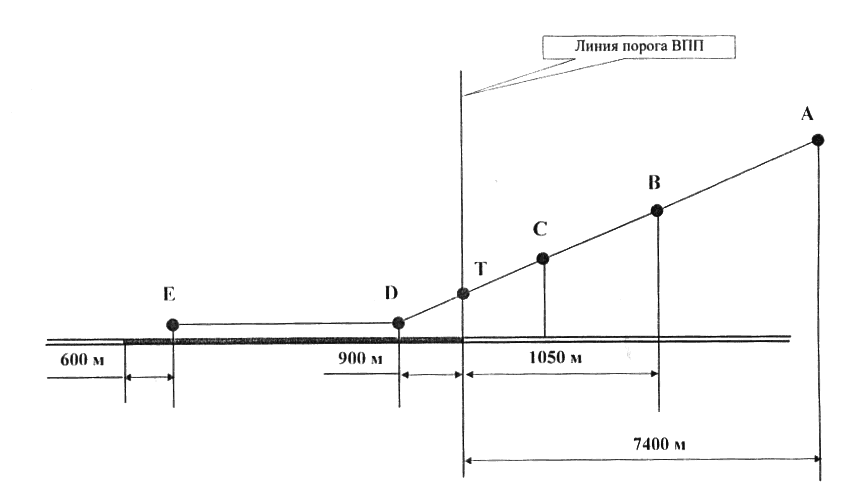
Рисунок 2. Схема расположения характерных точек на траектории снижения ВСЛ при летной проверке РМС.
|
Таблица 1. Участки измерений параметров и характеристик РМС | |||||||||
|
N п/п |
Наименование параметров и характеристик |
Категория РМС |
Участок измерений |
Примечание | |||||
|
1 |
2 |
3 |
4 |
5 | |||||
|
Курсовой радиомаяк | |||||||||
|
1 |
Азимутальная характеристика курсового радиомаяка (АХ КРМ) |
I, II, III |
1. Орбитальный полет ВСЛ с радиусом, равным 7-15 км от АФУ КРМ, на высоте полета, равной 300-460 м |
1. Автомати- | |||||
|
|
|
|
2. Полет над ДПРМ с курсом, отличным от посадочного на |
2. Полуавтомати- | |||||
|
2 |
Зона действия курсового радиомаяка в горизонтальной плоскости (ЗДкг КРМ) |
I |
Д = 50 км с курсом посадки до точки "В" |
Дальность действия радиомаяка | |||||
|
|
|
II |
Д - 50 км с курсом посадки до точки "Т" |
| |||||
|
|
|
III |
Д = 50 км с курсом посадки до точки "Е" с посадкой и пробегом |
| |||||
|
|
|
I, II, III |
Д = 50 км с курсами, отличными от посадочного на |
| |||||
|
|
|
I, II, III |
Д = 35 км с курсами, отличными от посадочного на |
| |||||
|
3 |
Зона действия курсового радиомаяка в вертикальной плоскости (ЗДкв КРМ) |
I, II, III |
Д = 50 км с курсом посадки и курсами, отличными от посадочного на |
||||||
|
|
|
I, II, III |
Д = 35 км с курсами, отличными от посадочного на |
| |||||
|
4 |
Положение средней линии курса относительно осевой линии ВПП (L) |
I |
От точки "А" до точки "С" вдоль оси ВПП |
Измерения проводятся при наличии информации о траектории полета ВСЛ (рисунок 8 приложения N 1) | |||||
|
|
|
II |
От точки "А" до точки "Т" вдоль оси ВПП |
| |||||
|
|
|
III |
От точки "А" до точки "Е" с посадкой и пробегом по ВПП |
| |||||
|
5 |
Чувствительность к смещению от линии курса (Sк) |
I, II, III |
От точки "А" до точки "В" на границах полусектора курса справа и слева |
Крутизна характеристики КРМ (рисунки 9 и 10 приложения N 1) | |||||
|
6 |
Амплитуда искривлений линии курса (структура курса - |
I |
От границы ЗД КРМ до точки "С" вдоль оси ВПП |
Измерения проводятся при наличии информации о траектории полета ВСЛ (Д | |||||
|
|
|
II |
От границы ЗД КРМ до точки "Т" вдоль оси ВПП |
| |||||
|
|
|
III |
От границы ЗД КРМ до точки "Е" с посадкой и пробегом по ВПП |
| |||||
|
7 |
Вертикальная составляющая (ВСП) |
I, II, III |
Д = 18-25 км до точки "В" |
||||||
|
Глиссадныи радиомаяк | |||||||||
|
8 |
Фазирование АФУ ГРМ |
I, II, III |
Д = 25-28 км на высоте полета, равной 300-460 м (Нп |
||||||
|
9 |
Угломестная характеристика глиссадного радиомаяка (УХ ГРМ) |
I, II, III |
Д = 25-28 км на высоте полета, равной 300-460 м (Нп |
||||||
|
10 |
Зона действия глиссадного радиомаяка в горизонтальной плоскости (ЗДгв ГРМ) |
I, II, III |
Д = 20-22 км с курсами, отличными от посадочного на |
Дальность действия радиомаяка (рисунки 11 и 13 приложения N 1) | |||||
|
11 |
Зона действия глиссадного радиомаяка в вертикальной плоскости (ЗДгг ГРМ) |
I, II, III |
Д = 20 --22 км с курсами, отличными от посадочного на |
||||||
|
12 |
Угол наклона глиссады снижения ( |
I, II, III |
От точки "А" до точки "В" на траектории снижения |
||||||
|
13 |
Амплитуда искривлений линии глиссады (структура глиссады - |
I |
От границы ЗД ГРМ до точки "С" вдоль оси ВПП |
Измерения проводятся при наличии информации о траектории полета ВСЛ (Д | |||||
|
|
|
II, III |
От границы ЗД ГРМ до точки "Т" вдоль оси ВПП |
| |||||
|
14 |
Чувствительность к смещению от линии глиссады (Sг) |
I, II, III |
От точки "А" до точки "В" на границах полусектора глиссады сверху и снизу |
Крутизна характеристики ГРМ (рисунки 12 и 14 приложения N 1) | |||||
Примечание. Амплитуды, о которых говорится в пп.5 и 13 таблицы 1, представляют собой РГМ, образующуюся в результате искривления линии курса - ![]() к (глиссады -
к (глиссады - ![]() г) по отношению к средней линии курса - L (глиссады -
г) по отношению к средней линии курса - L (глиссады - ![]() ) при правильной настройке курсового (глиссадного) радиомаяка.
) при правильной настройке курсового (глиссадного) радиомаяка.

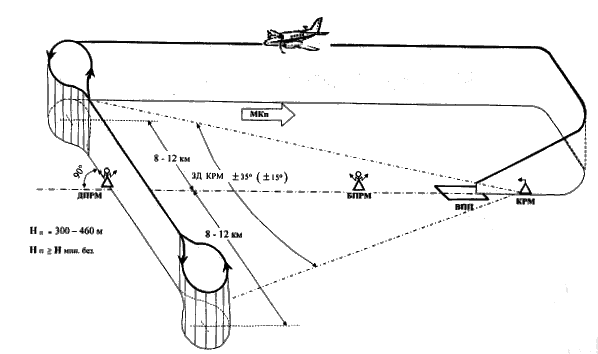
Рисунок 4. Схема маневрирования ВСЛ при определении АХ КРМ (клиренс при смещении от ЛК)
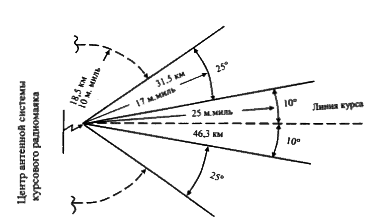
В тех случаях, когда того требуют топографические условия местности и позволяют эксплуатационные требования и альтернативные навигационные средства, обеспечивается следующая зона действия:
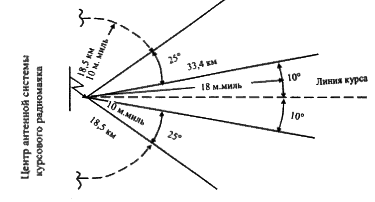
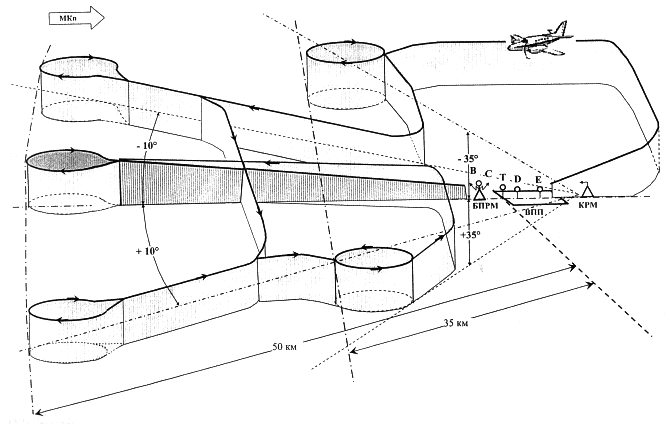
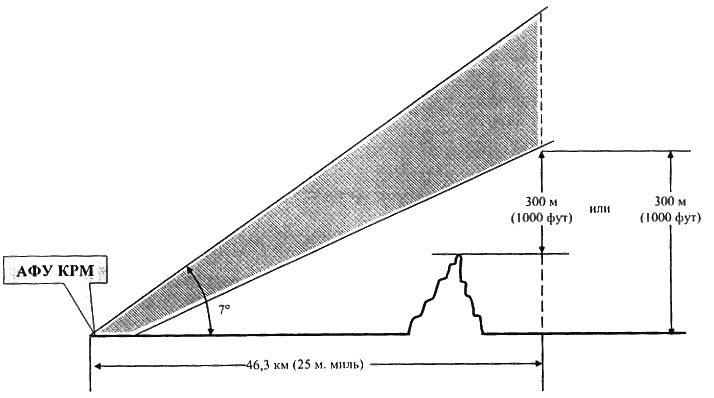
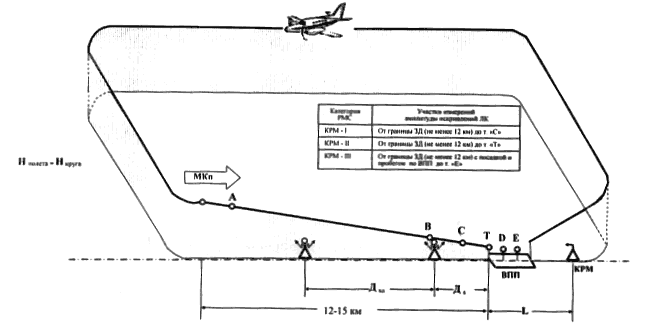
Рисунок 8. Схема маневрирования ВСЛ при определении положения средней линии курса
относительно оси ВПП, амплитуды искривлений курсовой линии и ВСП КРМ
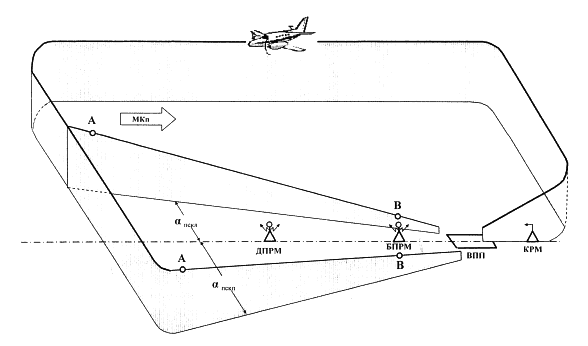
Рисунок 9. Схема маневрирования ВСЛ при измерении чувствительности к смещению от линии курса
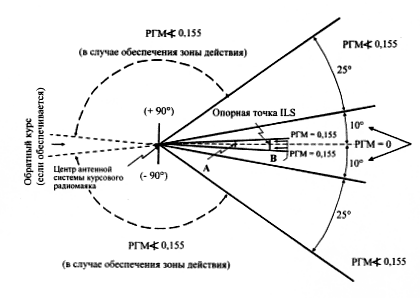
А - Сектор курса /рисунок/ 6 градусов
В - Чувствительность к смещению = 0, 00145 РГМ/м (0.00044 РГМ/фут) в опорной точке ILS
С - РГМ увеличивается линейно от нуля до величины 0,180, а затем становится /рисунок/ 0,180
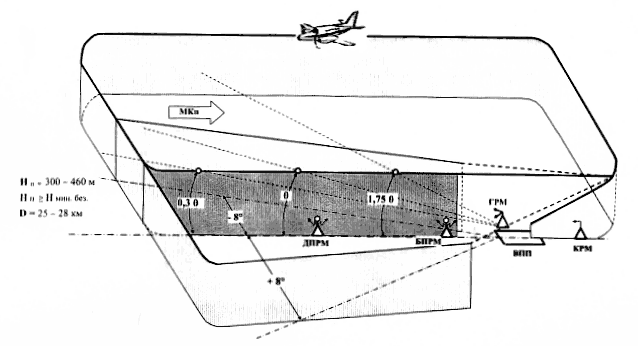
Рисунок 11. Схема маневрирования ВСЛ при определении УХ ГРМ, физировании АФУ, зоны
действия ГРМ в горизонтальной и верткальной плоскостях
|
|
|
|
А - РГМ равномерно возрастает до 0,22 РГМ |
РМС - I категории |
|
| |
|
|
|
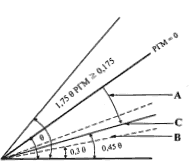
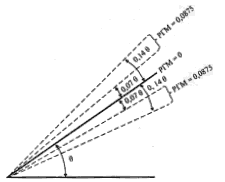
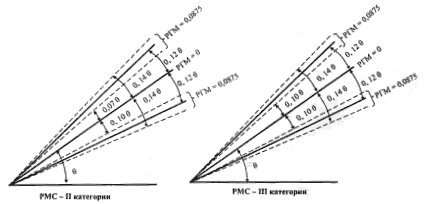
Рисунок 12. Глиссада. Разность глубины модуляции. Допуски для
пространственной диаграммы направленности излучения ГРМ
|
|
|
Зона действия ГРМ в горизонтальной плоскости (по азимуту). |
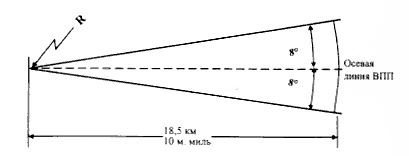
|
|
|
Зона действия ГРМ в вертикальной плоскости (по углу места). |
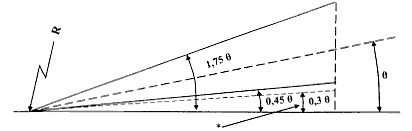
________________
* или до такого меньшего угла в пределах 0,3 ![]() , который требуется для обеспечения объявленной схемы захода на посадку с помощью глиссадного радиомаяка.
, который требуется для обеспечения объявленной схемы захода на посадку с помощью глиссадного радиомаяка.
R - Точка, в которой нисходящее продолжение прямолинейной части глиссады ILS пересекает осевую линию ВПП.
![]() - Угол наклона глиссады (ILS), регулируемый в пределах 2-4° .
- Угол наклона глиссады (ILS), регулируемый в пределах 2-4° .
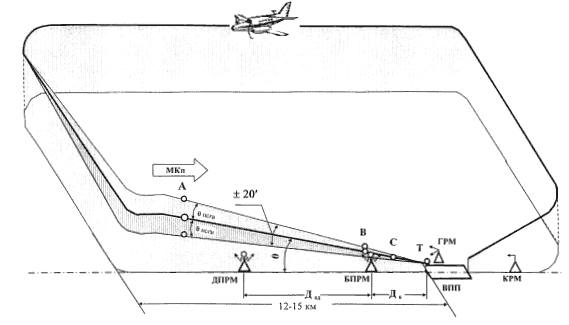
Рисунок 14. Схема маневрирования ВСЛ при определении угла наклона
глиссады, чувствительности к смещению от линии глиссады, измерении
амплитуды искривлений ЛГ и определении высоты опорной точки РМС.
|
Таблица 1. Контрольные ориентиры | |||||
|
N |
Название ориентира |
Координаты | |||
|
|
|
WGS-84 |
Полярные | ||
|
|
|
N |
Е |
А, град |
Д, км |
|
1 |
Церковь |
47°07,016' |
43°06,177' |
263,0 |
24,3 |
|
2 |
Ж.д. мост |
49°03,199' |
43°00,914' |
311,3 |
39,6 |
|
3 |
Перекресток |
49°09,920' |
45о20,112' |
043,6 |
48,2 |
|
4 |
Мост |
42°12,119' |
45°11,630' |
151,4 |
63,5 |
|
5 |
Водонап.башня |
40°51,342' |
42°51,340' |
212,2 |
56,4 |
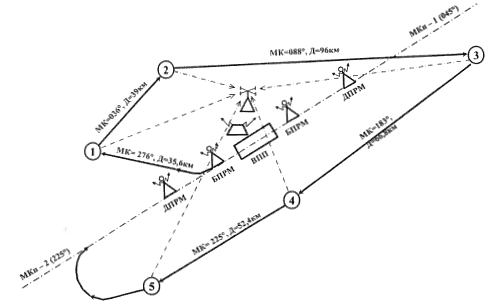
|
Таблица 2. Координаты установки средств РТОП | ||||||
|
N п/п |
Наименование средства РТОП |
Координаты |
| |||
|
|
|
WGS-84 |
Прямоугольные |
Расстоя- | ||
|
|
|
N |
Е |
X |
Y |
|
|
1 |
РМА/РМД |
47°37,184' |
044°32,296' |
5793058 |
5484629 |
300 |
|
2 |
РСБН |
47°32,364' |
044°28,563' |
5793056 |
5484618 |
280 |
|
3 |
АРП |
47°27,816' |
044°30,458' |
5793057 |
5484612 |
360 |
|
|
|
Рисунок 15. Схема маневрирования ВСЛ при летной проверке точностных характеристик средств радиотехнического обеспечения полетов |
|
|
|
Рисунок 16. Установка СТИ на позиции при летной проверке параметров и характеристик ПРЛ |
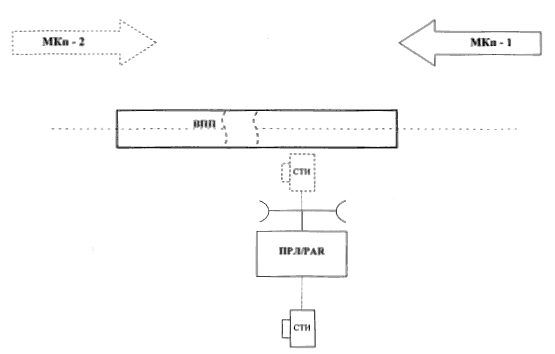
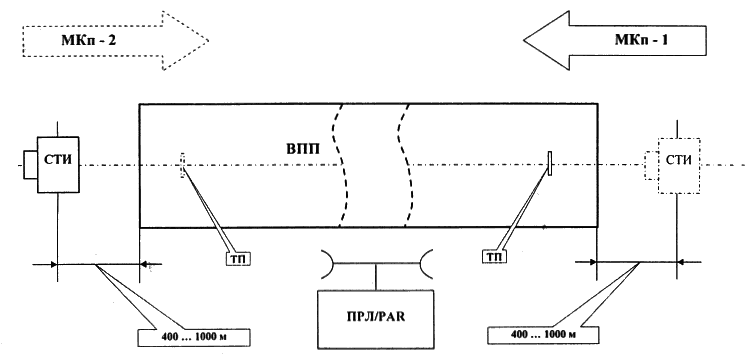
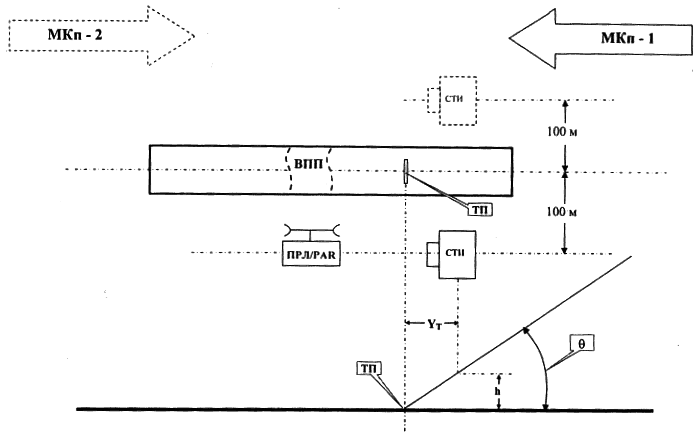

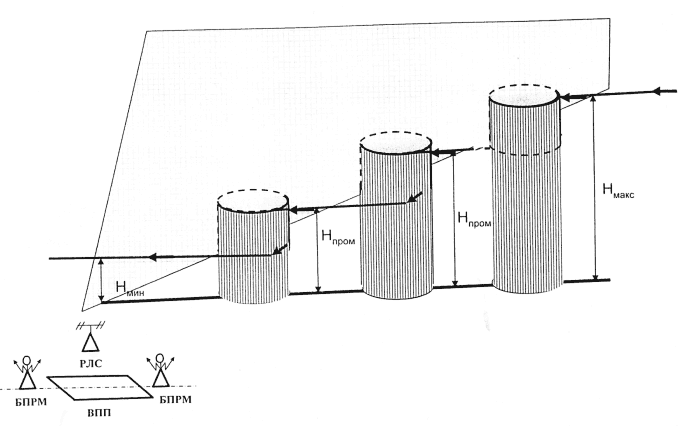
Приложение N 2
к Методическим рекомендациям
по летным проверкам наземных
средств РТОП, связи и систем ССО
(пп.59-79)
1. Дешифрирование фотоснимков с экрана индикатора
посадочного радиолокатора при определении ошибки информации ПРЛ/PAR
Дешифрирование фотоснимков с экрана индикатора посадочного радиолокатора при определении ошибки информации по курсу, глиссаде и дальности выполняется оператором ПРЛ (ответственным специалистом за эксплуатацию ПРЛ).
Ошибка информации ПРЛ по курсу (глиссаде) определяется отклонением центра отметки ВС от электронной линии курса (линии глиссады), считанным с фотоснимка экрана индикатора. Для повышения точности отсчетов фотоснимок (фотокадр) увеличивается с помощью проектора и изображение проецируется на экран, выполненный из миллиметровой бумаги.
Измеряются отклонения центра отметки ВСЛ от нулевой масштабной метки дальности (1д), от электронной линии курса (1к) и от электронной линии глиссады (1г) в миллиметрах с учетом знаков (рисунок 1 приложения N 2).
Масштабные коэффициенты по курсу (mк), глиссаде (mг) и дальности (mд) определяются делением величины угла между уголковыми отражателями нулевого и двадцатого километров (в угловых минутах) на расстояние между соответствующими отметками на фотоснимке (в миллиметрах). Масштабные коэффициенты рекомендуется проверять от кадра к кадру.
Местоположение воздушного судна относительно электронных линий траектории снижения (курса - ![]() и и глиссады -
и и глиссады - ![]() и) определяется по формулам:
и) определяется по формулам:
![]() иi = 1к mк;
иi = 1к mк;![]() иi = 1г mг;
иi = 1г mг;
Диi = 1д mд .
Дальность (Ди) определяется по масштабным меткам дальности. При несовпадение центра отметки от ВСЛ с масштабной меткой дальности удаление определяется по графику, который строится по изображению экрана индикатора, при этом по оси абсцисс откладываются отрезки, кратные 1 км, по оси ординат - расстояние между километровыми масштабными метками дальности, измеренное по фотоснимку экрана ПРЛ. На графике плавной кривой соединяются точки пересечений соответствующих значений по координатным осям, полученная линия называется поправочной кривой, которая позволяет проводить нелинейную интерполяцию отсчетов по дальности. При определении дальности измеряется расстояние между центром отметки от ВСЛ и ближайшей масштабной меткой дальности, откладывается это расстояние по оси ординат от соответствующей выбранной метки и проводится линия, параллельная оси абсцисс, до пересечения с поправочной плавной кривой. Из точки пересечения проводится перпендикуляр и определяется дальность до отметки от ВСЛ.
Примечание. Если в момент измерения координат допущены ошибки в определении местоположения отметки от ВСЛ на экране индикатора или при слежении за траекторией полета ВСЛ перекрестие окуляра СТИ (теодолита) не совпадало с носовой частью ВС, то результат такого измерения исключается из анализа вычисления ошибки информации ПРЛ.
|
|
|
Рисунок 1. Дешифрирование фотоснимков с экрана индикатора |
Для каждого интервала удалений ВСЛ от АФУ ПРЛ (11-9 км; 9-7 км; 7-5 км; 5-3 км; 3-1 км) определяются значения ошибки информации ПРЛ по курсовому (![]() j) и глиссадному (
j) и глиссадному (![]() j) каналам посадочного радиолокатора.
j) каналам посадочного радиолокатора.
Ошибка информации по дальности (Дi) вычисляется для каждого эталонного расстояния (контрольного ориентира).
По результатам вычислений строится график ошибки информации ПРЛ по каналам курса и глиссады (рисунок 2 приложения N 2).
|
|
|
Рисунок 2.1. Курсовой канал ( |
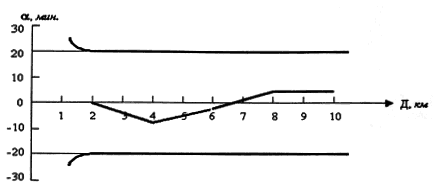
|
|
|
Рисунок 2.2. Глиссадный канал ( |
Рисунок 2. Допустимые величины ошибки информации ПРЛ
Если полученные в процессе проверки значения ошибки информации ПРЛ имеют постоянный знак или некоторые из них превышают норму допуска, то необходимо провести регулировку аппаратуры ПРЛ заново и повторить летную проверку.
Разрешающая способность ПРЛ по дальности, курсу и глиссаде определяется размером отметок от ВСЛ (ВС) по соответствующей координате, измеренных с фотоснимка экрана индикатора.
Для увеличения точности измерений полученные фотокадры проецируются на экран. С помощью циркуля и линейки определяются размеры отметок от ВСЛ (ВС) на экране индикатора (рисунок 1 приложения N 2) по дальности (ад), курсу (ак) на курсовой части экрана индикатора и глиссады (аг) на глиссадной части экрана индикатора ПРЛ в направлении соответствующих масштабов и масштабных коэффициентов (mд, mк и mг соответственно). Масштабные коэффициенты проверяются для каждого фотокадра.
2. Форма таблицы для заполнения информацией, получаемой
при летной проверке зоны действия первичных и вторичных РЛС
|
Таблица 2.1. Результаты летной проверки РЛС | ||||||||
|
Д, км |
Отметка от |
|
|
Pi |
Качество |
Наличие | ||
|
|
ВС |
|
, |
|
дополнительной |
сигналов от | ||
|
|
|
(тип ВС) |
|
|
информации |
боковых лепестков, | ||
|
|
борт. N_______ |
|
номер ВС |
высота, м |
переотраженных сигналов | |||
|
1 |
2 |
3 |
4 |
5 |
6 | |||
|
400 |
|
|
|
|
| |||
|
395 |
|
|
|
|
| |||
|
390 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
380 |
|
|
|
|
| |||
|
375 |
|
|
|
|
| |||
|
370 |
|
|
|
|
| |||
|
365 |
|
|
|
|
| |||
|
360 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
200 |
|
|
|
|
| |||
|
195 |
|
|
|
|
| |||
|
190 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
90 |
|
|
|
|
| |||
|
85 |
|
|
|
|
| |||
|
80 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
50 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
20 |
|
|
|
|
| |||
|
. |
|
|
|
|
| |||
|
Руководитель объекта |
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию РЛС) |
(наименование объекта) |
|
(подпись) |
|
(инициалы, фамилия) |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
Примечание. Наличие отметки от ВС - "X", отсутствие - "О". Качество дополнительной информации: "Н" - норма, "Л" - ложная, "О" - отсутствие.
3. Пример определения зоны действия и вероятности
правильного обнаружения ВС (цели) первичных и вторичных РЛС
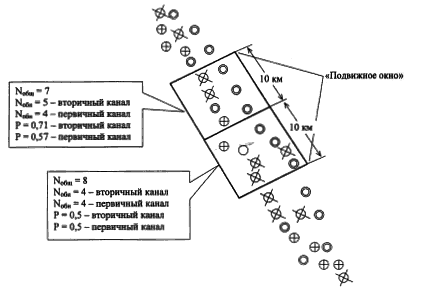
Условные обозначения:
|
|
- |
пропуск цели (в ожидаемой точке информация отсутствовала); |
|
|
- |
ВС (цель) обнаружено по первичному каналу; |
|
|
- |
ВС (цель) обнаружено по вторичному каналу; |
|
|
- |
ВС (цель) обнаружено по первичному и вторичному каналам. |
Для каждой высоты полета, отдельно при маневрировании ВСЛ "НА" и "ОТ" РЛС, оценивается частота обнаружения ВС, определяемая как отношение числа обнаружений на отрезке маршрута к количеству оборотов антенны за промежуток времени, в течение которого ВС пролетает этот отрезок (т.е. к максимально возможному количеству обнаружений на данном отрезке маршрута). Расчет частоты обнаружений проводится по отношению к отрезку маршрута длиной около 10 км ("подвижное окно"). Внутри "подвижного окна" для всех полетов на данной высоте, отдельно "НА" и "ОТ" РЛС, выполняется не менее 40 отсчетов (с учетом данных, полученных по информации при наблюдении за ВСЛ и по информации, полученной при наблюдении за реальным воздушным движением). Результат расчета относится к точке маршрута, соответствующей середине "подвижного окна". Передвигая "подвижное окно" по трассе полета определяется частота обнаружения, соответствующая каждой точке маршрута (расстояния). Шаг перемещения "подвижного окна" по дальности соответствует перемещению воздушного судна между последовательными зондированиями (облучениями) диаграммой направленности антенны РЛС.
Определение вероятностных характеристик РЛС и построения графика зоны действия радиолокационной станции с использованием реального воздушного движения осуществляется путем накопления информации по всем ВС в выбранном направлении (воздушной трассе, коридоре) и высотном диапазоне за период наблюдения с помощью десяти километровых участков, перемещаемых по направлению наблюдения с шагом 5 или 10 км ("подвижное окно").
В каждом "подвижном окне" подсчитывается:
общее количество возможных обнаружений ВС (Noбщ.);
количество реальных обнаружений ВС (Noбн.).
По полученным результатам выполняется расчет вероятности обнаружения (Р) в соответствующем "подвижном окне", приведенный к его центру, по формуле:
![]()
По экрану отображения радиолокационной информации проводится наблюдение за перемещением отметки от ВСЛ (ВС), и на каждом обзоре фиксируется ее наличие отдельно по первичному и вторичному каналам. Решение об обнаружении отметки от ВС на экране отображения радиолокационной информации "ДА (X) - НЕТ (О)" принимается при каждом пересечении диаграммой направленности антенны РЛС азимута ВС, результаты заносятся в таблицу 3.1 приложения N 2 и по этим результатам определяются весовые коэффициенты.
Таблица 3.1
|
Дальность от АФУ РЛС, км |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
120 |
130 | |||||||||
|
Качество отметки, (X - О) |
X |
X |
X |
X |
О |
X |
X |
О |
X |
O |
O |
O |
O | |||||||||
|
Весовой коэффициент, К |
1 |
1 |
1 |
0,5 |
0,5 |
1 |
0,5 |
0,5 |
0,5 |
0 |
0 |
0 | ||||||||||
|
Вероятность обнаружения, Pi |
|
0,65 |
0,55 |
0,45 |
0,35 |
| ||||||||||||||||
Весовые коэффициенты могут принимать значения: 0; 0,5; 1,0 в зависимости от присутствия или отсутствия отметки от ВС на экране отображения радиолокационной информации в начале и конце рассматриваемого интервала наблюдений.
Пример. Вероятность обнаружения РЛС рассчитывается для каждого интервала наблюдений между центрами "подвижного окна" с учетом весовых коэффициентов пяти предыдущих и четырех последующих интервалов как среднеарифметическое значение из десяти отсчетов по формуле:
где
![]() - вероятность обнаружения РЛС на i (j) интервале наблюдений;
- вероятность обнаружения РЛС на i (j) интервале наблюдений;
К![]() , К
, К![]() , ..., К
, ..., К![]() - весовые коэффициенты на рассматриваемом интервале наблюдений ("подвижное окно").
- весовые коэффициенты на рассматриваемом интервале наблюдений ("подвижное окно").
На примере, приведенном в таблице 3.1 приложения N 2, центр "подвижного окна" находится между 60 и 70 км (Кбц). Качество отметки от ВС на пяти предыдущих интервалах: в четырех случаях - "X", в одном - "О"; качество отметки от ВС на четырех последующих интервалах: в двух случаях - "X", в двух - "О". Вероятность обнаружения РЛС для данного примера (центр "подвижного окна" находится между 60 и 70 км) составляет 0,65.
4. Пример определения зоны действия и вероятности правильного
обнаружения первичных и вторичных РЛС с использованием
информации при наблюдении за реальным воздушным движением
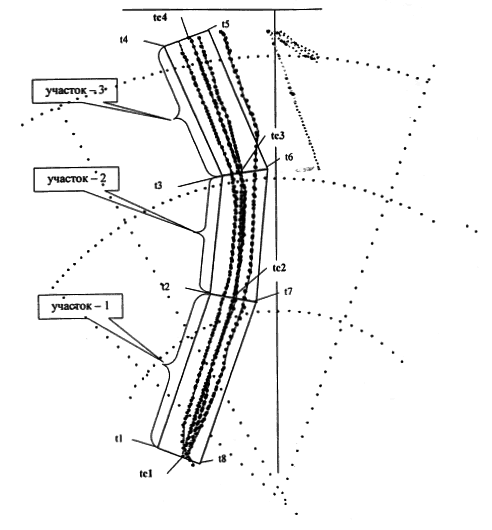
При проверке потенциальных возможностей РЛС (дальности действия) с использованием информации, получаемой при наблюдении за реальным воздушным движением, применяется метод определения вероятности обнаружения ВС (цели) по участкам, равной протяженности проверяемого направления воздушного движения (трассы, коридора).
На данном примере проверяемое направление воздушного движения (трассы) состоит из трех участков примерно равной протяженности. Ширина воздушной трассы соответствует расстоянию между точками t1-t8, t2-t7, t3-t6, t4-t5. Идеальное направление движения ВС по этой трассе на приведенном рисунке задано точками tc1, tc2, tc3 и tc4.
Приложение N 3
к Методическим рекомендациям
по летным проверкам наземных средств РТОП,
связи и систем ССО
(пп.84-98)
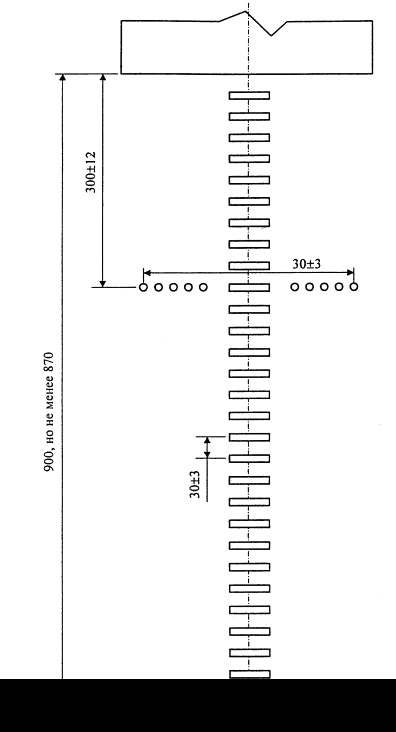
Условные обозначения:
|
|
- |
линейный огонь приближения, белый; |
|
|
- |
огонь светового горизонта, белый. |
Рисунок 1. Схема расположения огней приближения системы ОВИ-I по
центральному ряду (размеры приведены в метрах)
Условные обозначения:
|
|
- |
огонь приближения и световых горизонтов, белый. |
Рисунок 2. Схема расположения огней приближения системы ОВИ-I с пятью
световыми горизонтами (размеры приведены в метрах).

Условные обозначения:
|
|
- |
входной огонь ВПП, зеленый; |
|
|
- |
ограничительный огонь ВПП, красный; |
|
|
- |
боковой огонь ВПП, белый; |
|
|
- |
боковой огонь ВПП, желтый; |
|
|
- |
система визуальной индикации глиссады PAPI. |
Рисунок 3. Схема расположения огней ВПП системы ОВИ-I (размеры приведены в метрах)
Условные обозначения:
|
|
- |
линейный огонь приближения, белый; |
|
|
- |
огонь светового горизонта, белый; |
|
|
- |
входной огонь ВПП, зеленый; |
|
|
- |
входной огонь фланговых горизонтов, зеленый; |
|
|
- |
боковой огонь ВПП, белый; |
|
|
|
боковой огонь ВПП, красный. |
Рисунок 4. Схема расположения огней системы ОВИ-I при наличии
смещенного порога ВПП (размеры приведены в метрах)
|
|
|
|
|
|
|
Слишком высоко |
|
|
|
|
|
|
|
|
|
Немного высоко |
|
Высоко |
|
|
|
|
|
|
|
На глиссаде |
|
На глиссаде |
|
|
|
|
|
|
|
Немного низко |
|
Низко |
|
|
|
|
|
|
|
|
|
Система APAPI |
|
|
Слишком низко |
|
|
|
|
|
|
|
|
|
Система PAPI |
|
|


|
Условные обозначения: | ||
|
|
- |
белый глиссадный огонь; |
|
|
- |
красный глиссадный огонь. |
Рисунок 5. Информация систем PAPI и АРAPI о положении воздушного судна относительно глиссады снижения
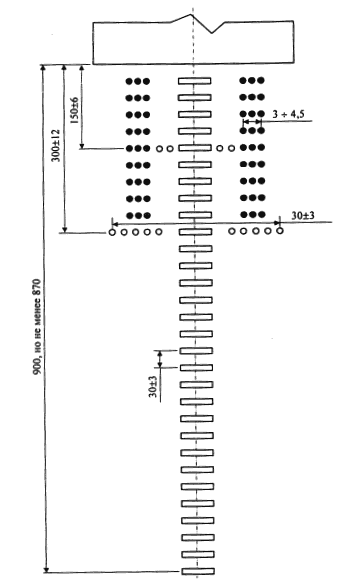
Условные обозначения:
|
|
- |
линейный огонь приближения, белый; |
|
|
- |
огонь светового горизонта, белый; |
|
|
- |
боковой огонь приближения, красный. |
Рисунок 6. Схема расположения огней приближения системы ОВИ-II (размеры приведены в метрах)
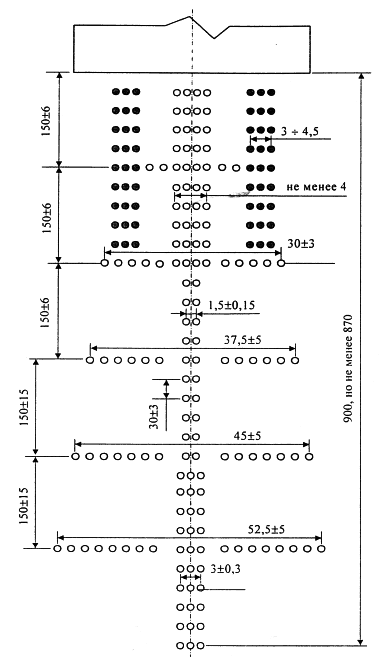
Условные обозначения:
|
|
- |
огонь приближения и световых горизонтов, белый; |
|
|
- |
боковой огонь приближения, красный. |
Рисунок 7. Схема расположения огней приближения систем ОВИ-II и ОВИ-III (размеры приведены в метрах)
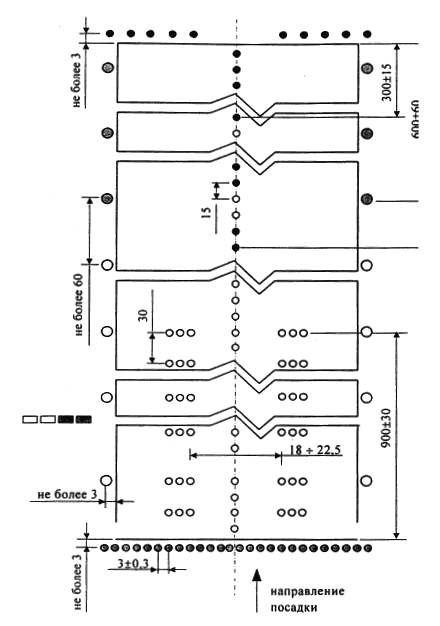
Условные обозначения:
|
|
- |
входной огонь ВПП, зеленый; |
|
|
- |
ограничительный огонь ВПП, осевой огонь ВПП, красный; |
|
|
- |
огонь зоны приземления, осевой огонь ВПП, белый; |
|
|
- |
боковой огонь ВПП, белый; |
|
|
- |
боковой огонь ВПП, желтый; |
|
|
- |
система визуальной индикации глиссады PAPI. |
Рисунок 8. Схема расположения огней ВПП системы ОВИ-II и ОВИ-III (размеры приведены в метрах)
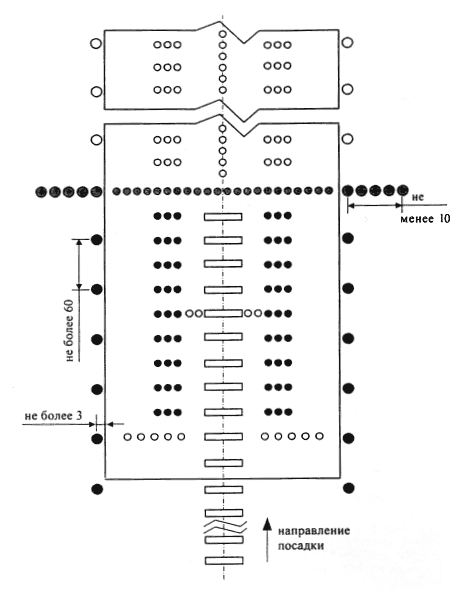
Условные обозначения:
|
|
- |
линейный огонь приближения, белый; |
|
|
- |
огонь световых горизонтов, огонь зоны приземления, осевой огонь ВПП, белый; |
|
|
- |
боковой огонь приближения, ограничительный огонь, красный; |
|
|
- |
входной огонь ВПП, зеленый; |
|
|
- |
входной огонь фланговых горизонтов, зеленый; |
|
|
- |
боковой огонь ВПП, белый; |
|
|
- |
боковой огонь ВПП, красный. |
Рисунок 9. Схема расположения огней систем ОВИ-II и ОВИ-III при
наличии смещенного порога ВПП (размеры приведены в метрах)
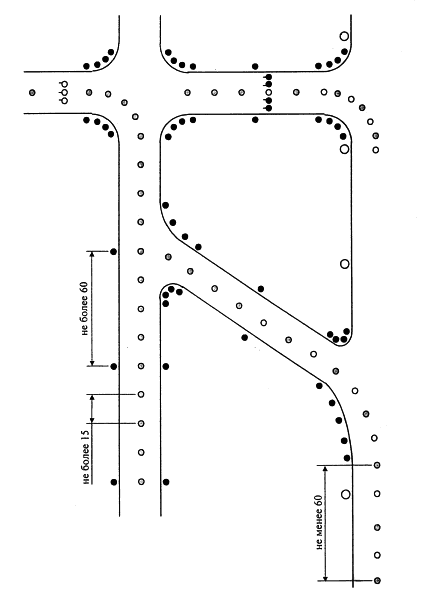
Условные обозначения:
|
|
- |
боковой огонь ВПП и осевой огонь ВПП, белый; |
|
|
- |
боковой огонь РД, синий; |
|
|
- |
осевой огонь РД, зеленый; |
|
|
- |
осевой огонь РД, примыкающей к ВПП, желтый-зеленый; |
|
|
- |
огонь линии "стоп", красный; |
|
|
- |
огонь промежуточного места ожидания, желтый. |
Рисунок 10. Схема расположения огней РД (размеры приведены в метрах)
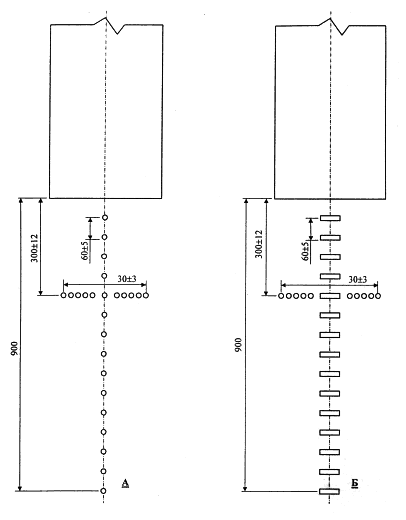
Условные обозначения:
|
|
- |
огонь приближения и светового горизонта, белый; |
|
|
- |
линейный огонь приближения, белый |
Рисунок 11. Схема расположения огней приближения системы ОМИ (размеры приведены в метрах)
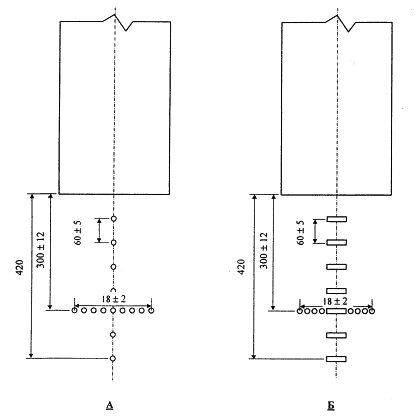
Условные обозначения:
|
|
- |
огонь приближения и светового горизонта, белый; |
|
|
- |
линейный огонь приближения, белый. |
Рисунок 12. Схема расположения огней приближения системы ОМИ (L = 420 м) (размеры приведены в метрах)
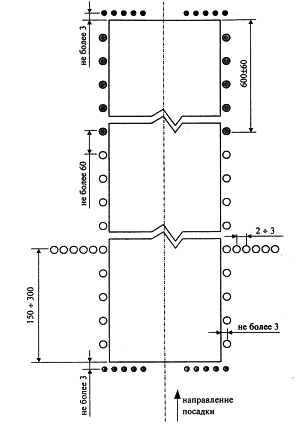
Условные обозначения:
|
|
- |
входной огонь ВПП, зеленый; |
|
|
- |
боковой огонь ВПП, огонь знака приземления, белый; |
|
|
- |
боковой огонь ВПП, желтый; |
|
|
- |
ограничительный огонь ВПП, зеленый-красный. |
Рисунок 13. Схема расположения огней ВПП системы ОМИ (размеры приведены в метрах)
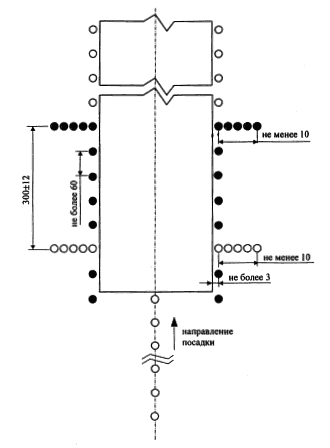
Условные обозначения:
|
|
- |
огонь приближения и светового горизонта, боковой огонь ВПП, белый; |
|
|
- |
входной огонь фланговых горизонтов, зеленый; |
|
|
- |
боковой огонь ВПП, красный. |
Рисунок 14. Схема расположения огней системы ОМИ при наличии
смещенного порога ВПП (размеры приведены в метрах)
Приложение N 4
к Методическим рекомендациям
по летным проверкам наземных средств
РТОП, связи и систем ССО
(пп.11-98)
ПЕРЕЧЕНЬ
требований ИКАО к летной проверке наземных средств радиотехнического
обеспечения полетов, авиационной электросвязи и систем
светосигнального оборудования аэродромов
|
Таблица 1.1. PMC/ILS | ||||||||||||||
|
N п/п |
Наименование параметра, характеристики |
Единица изме- |
Требования и допуски к параметрам и характеристикам | |||||||||||
|
|
|
|
PMC-I |
РМС-II |
РМС-III | |||||||||
|
1 |
2 |
3 |
4 |
5 |
6 | |||||||||
|
Курсовой радиомаяк | ||||||||||||||
|
1 |
Точность юстировки курса (Lo) в |
|
|
|
| |||||||||
|
|
опорной точке PMC/ILS ("T") |
м |
|
|
| |||||||||
|
|
относительно осевой линии ВПП |
(фут) |
( |
( |
( | |||||||||
|
2 |
Номинальная чувствительность к смещению от ЛК (Sкп) в пределах ПСК у порога ВПП. |
РГМ/м |
0,00145 |
0,00145 |
0,00145 | |||||||||
|
3 |
Пределы, в которых поддерживается чувствительность к смещению от ЛК ( |
% |
|
|
| |||||||||
|
4 |
Амплитуда искривлений ЛК (структура курса - |
|
|
|
| |||||||||
|
|
границы ЗД до т. "А", не более |
РГМ |
0,031(50,0) |
0,031 (50,0) |
0,031(50,0) | |||||||||
|
|
т. "А" до т. "В", не более |
|
0,015(25,0) |
0,005 (8,0) |
0,005 (8,0) | |||||||||
|
|
т. "В" до т. "С", не более |
|
0,015(25,0) |
0,005 (8,0) |
0,005 (8,0) | |||||||||
|
|
т. "В" до т "T/RDH", не более |
|
- |
0,005 (8,0) |
0,005 (8,0) | |||||||||
|
|
т. "В" до т. "Д", не более |
|
- |
- |
0,01 (16,0) | |||||||||
|
|
т. "Д" до т. "Е", не более |
|
- |
- |
0,01 (16,0) | |||||||||
|
5 |
ЗДкг КРМ в горизонтальной плоскости (дальность действия) в секторах, не менее: |
|
|
|
| |||||||||
|
|
|
км |
46,3 (25 м.миль) |
46,3 (25 м.миль) |
46,3 (25 м.миль) | |||||||||
|
|
от |
км |
31,5 (17 м.миль) |
3 1,5 (17 м.миль) |
31,5 (17 м.миль) | |||||||||
|
6 |
ЗДкв КРМ в верт. плоскости, не менее |
градус |
7,0 |
7,0 |
7,0 | |||||||||
|
7 |
Напряженность поля КРМ, Ек, не менее: |
|
|
|
| |||||||||
|
|
на границах ЗД КРМ |
мкВ/м |
40 |
40 |
40 | |||||||||
|
|
на глиссаде в пределах сектора курса на удалении 18,5 км (10 м.миль) от АФУ КРМ |
|
90 |
90 |
100 | |||||||||
|
|
в опорной точке увеличение до |
|
- |
200 |
200 | |||||||||
|
|
от опорной точки "T/RDH" до точек "Д" и "Е", не менее |
|
- |
- |
100 | |||||||||
|
8 |
АХ КРМ (характер изменения РГМ) в секторах: |
РГМ |
| |||||||||||
|
|
от ЛК до углов, где РГМ равна +0,180 |
|
Монотонное увеличение | |||||||||||
|
|
от ЛК до угла, где РГМ равна |
|
Монотонное уменьшение | |||||||||||
|
|
от углов с РГМ, равной |
|
Не менее 0,180 | |||||||||||
|
|
от углов, равных |
|
Не менее 0,155 | |||||||||||
|
9 |
ВСП при крене ВСЛ, равном |
РГМ |
|
|
| |||||||||
|
10 |
Влияние широкого канала на положение ср. ЛК (L), не более |
градус |
|
|
| |||||||||
|
11 |
САК КРМ при: |
|
|
|
| |||||||||
|
|
смещении средней ЛК от осевой линии ВПП в опорной точке "T/RDH" РМС (юстировка - Lав/п (Lав/л)), не более |
м (фут) |
|
|
| |||||||||
|
|
изменении чувствительности к смещению от ЛК ( |
% |
|
|
| |||||||||
|
|
уменьшении мощности излучения радиомаяка до: |
|
Соответствие параметров требованиям пп.4-6 табл.1.1 приложения N 4 |
Соответствие параметров требованиям пп.4-6 табл.1.1 приложения N 4 |
Соответствие параметров требованиям пп.4-6 табл.1.1 приложения N 4 | |||||||||
|
|
50% (одночастотный КРМ) |
|
|
|
| |||||||||
|
|
80% (двухчастотный КРМ) |
|
|
|
| |||||||||
|
12 |
Опознавание |
код Морзе, первая И, |
Четкая, ясная слышимость |
Четкая, ясная слышимость |
Четкая, ясная слышимость | |||||||||
|
Глиссадный радиомаяк | ||||||||||||||
|
13 |
Номинальный угол глиссады, |
градус |
2-4 |
2-4 |
2-4 | |||||||||
|
14 |
Точность юстировки и поддержания среднего угла глиссады ( |
отн. ед. |
|
|
| |||||||||
|
15 |
Высота опорной точки PMC/ILS - "Т"/RDH |
м (фут) |
15,0+ 3,0 |
15,0+ 3,0 |
15,0+ 3,0 | |||||||||
|
16 |
Номинальная чувствительность к смещению от ЛГ (Sг ном), положение границ ПС глиссады относительно номинальной ЛГ: |
|
|
|
| |||||||||
|
|
выше глиссады |
мин |
+ |
+ |
+ (0,12 | |||||||||
|
|
(величины полусекторов устанавливаются максимально симметрично) |
|
|
|
| |||||||||
|
|
ниже глиссады |
мин |
- |
- (0,12 |
-(0,12 | |||||||||
|
|
пределы поддержания чувствительности к смещению от ЛГ относительно установленного номинального значения ( |
% |
|
|
| |||||||||
|
17 |
Амплитуда искривлений ЛГ (структура глиссады - |
РГМ |
|
|
| |||||||||
|
|
от границы ЗД до т. "А", не более |
|
0,035 (50,0) |
0,035 (50,0) |
0,035 (50,0) | |||||||||
|
|
от т. "А" до т. "В", не более |
|
0.035 (50,0) |
линейное |
линейное | |||||||||
|
|
от т. "А" до т. "С", не более |
|
0,035 (50,0) |
0,023 (32,0) |
0,023 (32,0) | |||||||||
|
|
от т. "В" до т. "Т", не более |
|
- |
0,023 (32,0) |
0,023 (32,0) | |||||||||
|
18 |
ЗД ГРМ в: |
|
|
|
| |||||||||
|
|
горизонтальной плоскости (ЗДгг) в |
км |
18,5 |
18,5 |
18,5 | |||||||||
|
|
секторе |
(м.миль) |
(10,0) |
(10,0) |
(10,0) | |||||||||
|
|
вертикальной плоскости (ЗДгв) в |
|
|
|
| |||||||||
|
|
секторе с углами: |
|
|
|
| |||||||||
|
|
верхней границы |
градус |
1,75 |
1,75 |
1,75 | |||||||||
|
|
нижней границы |
градус |
0,45 |
0,45 |
0,45 | |||||||||
|
19 |
Напряженность поля (Ег) в ЗД ГРМ, не менее |
мкВ/м |
400 |
400 |
400 | |||||||||
|
20 |
УХ ГРМ в секторах, |
|
|
|
| |||||||||
|
|
вверх: |
|
|
|
| |||||||||
|
|
РГМ равна 0,175 |
|
Плавное |
Плавное |
Плавное | |||||||||
|
|
от угла, где РГМ равна 0,175, до угла, равного 1,75 |
РГМ |
0,175 |
0,175 |
0,175 | |||||||||
|
|
вниз: |
|
|
|
| |||||||||
|
|
от линии глиссады до угла, где РГМ равна - 0,22 |
|
Плавное |
Плавное |
Плавное | |||||||||
|
|
от угла, где РГМ равна - 0,22, до угла, равного 0,45 |
|
-0,22 |
-0,22 |
-0,22 | |||||||||
|
|
Если плавное уменьшение |
|
|
|
| |||||||||
|
21 |
Влияние широкого канала на положение ср. ЛГ ( |
мин |
|
|
| |||||||||
|
22 |
САК ГРМ при: |
|
|
|
| |||||||||
|
|
смещении средней ЛГ ( |
отн. ед. |
|
|
| |||||||||
|
|
изменении чувствительности к смещению (Sг) от номинального значения ( |
% |
|
|
| |||||||||
|
|
уменьшении мощности излучения радиомаяка до: |
|
Соответствие параметров |
Соответствие параметров |
Соответствие параметров | |||||||||
|
|
50% (одночастотный ГРМ) |
|
требованиям пп.17, 18 табл.1.1 приложения N 4 |
требованиям пп.17, 18 табл.1.1 приложения N 4 |
требованиям | |||||||||
|
Маркерный радиомаяк | ||||||||||||||
|
23 |
ЗД МРМ на ЛК и ЛГ: |
|
| |||||||||||
|
|
дальний МРМ/ОМ |
м (фут) |
600 | |||||||||||
|
|
ближний МРМ/ММ |
м (фут) |
300 | |||||||||||
|
|
внутренний MPM/IM |
м (фут) |
150 | |||||||||||
|
24 |
Напряженность поля (Ем): на границах ЗД МРМ, не менее |
мВ/м |
1,5 | |||||||||||
|
|
в ЗД МРМ составляет, не менее |
мВ/м |
3,0 | |||||||||||
|
25 |
Манипуляция |
Четкая, ясная слыши- |
Правильная манипуляция, ясная слышимость | |||||||||||
|
26 |
Напряженность поля (Ем). |
мВ/м |
| |||||||||||
Примечания:
1. Точность юстировки линии курса (Lo) курсовых радиомаяков PMC/ILS II категории рекомендуется устанавливать и поддерживать в пределах (![]() L), эквивалентных смещению средней линии курса, равной
L), эквивалентных смещению средней линии курса, равной ![]() 4,5 м (15,0 фут) от осевой линии ВПП в опорной точке PMC/ILS ("T"/RDH).
4,5 м (15,0 фут) от осевой линии ВПП в опорной точке PMC/ILS ("T"/RDH).
2. Минимальная напряженность поля (Ек) курсовых радиомаяков PMC/ILS I категории на глиссаде ILS и в пределах сектора курса, начиная от точки, находящейся на расстоянии 18,5 км (10 м.миль) от АФУ КРМ, до высоты 60 м (200 фут) над горизонтальной плоскостью, проходящей через порог ВПП, составляет не менее 90 мкВ/м (- 107 дБВт/м![]() ).
).
3. Минимальная напряженность поля (Ек) курсовых радиомаяков PMC/ILS II категории на глиссаде ILS и в пределах сектора курса составляет не менее 100 мкВ/м (-106 дБВт/м![]() ) на расстоянии 18,5 км (10 м.миль) от АФУ КРМ, возрастая до величины не менее 200 мкВ/м (-100 дБВт/м
) на расстоянии 18,5 км (10 м.миль) от АФУ КРМ, возрастая до величины не менее 200 мкВ/м (-100 дБВт/м![]() ) на высоте 15 м (50 фут) над горизонтальной плоскостью, проходящей через порог ВПП.
) на высоте 15 м (50 фут) над горизонтальной плоскостью, проходящей через порог ВПП.
4. Минимальная напряженность поля (Ек) курсовых радиомаяков PMC/ILS III категории на глиссаде ILS и в пределах сектора курса составляет не менее 100 мкВ/м (-106 дБВт/м![]() ) на расстоянии 18,5 км (10 м.миль) от КРМ, возрастая до величины не менее 200 мкВ/м (-100 дБВт/м
) на расстоянии 18,5 км (10 м.миль) от КРМ, возрастая до величины не менее 200 мкВ/м (-100 дБВт/м![]() ) на высоте 6 м (20 фут) над горизонтальной плоскостью, проходящей через порог ВПП. От этой точки до другой точки, находящейся на высоте 4 м (12 фут) над осевой линией ВПП и 300 м (1000 фут) от порога ВПП в направлении к КРМ, напряженность поля составляет не менее 100 мкВ/м (-106 дБВт/м
) на высоте 6 м (20 фут) над горизонтальной плоскостью, проходящей через порог ВПП. От этой точки до другой точки, находящейся на высоте 4 м (12 фут) над осевой линией ВПП и 300 м (1000 фут) от порога ВПП в направлении к КРМ, напряженность поля составляет не менее 100 мкВ/м (-106 дБВт/м![]() ).
).
5. Высота опорной точки PMC/ILS ("T"/RDH) для PMC/ILS, ГРМ I категории при выполнении точного захода ВС на посадку на короткие ВПП (по классификации ИКАО: код 1, 2 - длина ВПП 1200 м и менее) составляет 12 м + 6,0 м (40 фут + 20,0 фут).
Таблица 1.2. РМС/СП
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам и характеристикам | |||||||
|
|
|
|
PMC-I |
РМС-II | ||||||
|
1 |
2 |
3 |
4 |
5 | ||||||
|
Курсовой радиомаяк | ||||||||||
|
1 |
Точность юстировки курса (Lo) в опорной точке PMC/ILS ("T") относительно осевой линии ВПП |
м |
|
| ||||||
|
2 |
Ширина сектора курса (СК) |
град. |
3-6 |
3-6 | ||||||
|
3 |
Номинальная чувствительность к смещению от ЛК (Sкн) в пределах ПСК у порога ВПП |
%/м |
0,167 |
0,167 | ||||||
|
4 |
Пределы, в которых поддерживается чувствительность к смещению от ЛК ( |
% |
|
| ||||||
|
5 |
Амплитуда искривлений ЛК (структура курса - |
|
|
| ||||||
|
|
границы ЗД до т. "А", не более |
|
3,5 (50,0) |
3,5 (50,0) | ||||||
|
|
т. "А" до т. "R" не более |
% |
3,5 (50,0) |
3,5 (50,0) | ||||||
|
|
т. "В" до т. "С", не более |
(мкА) |
1,7 (25,0) |
1,7 (25,0) | ||||||
|
6 |
Асимметрия крутизны характеристики КРМ, Акк |
% |
9 |
9 | ||||||
|
7 |
ЗДкг КРМ в горизонтальной плоскости (дальность действия) в секторах, не менее: |
|
|
| ||||||
|
|
|
км |
45,0 |
45,0 | ||||||
|
|
от |
км |
30,0 |
30,0 | ||||||
|
8 |
ЗДкв КРМ в верт. плоскости, не менее |
градус |
0,85-7,0 |
0,85-7,0 | ||||||
|
9 |
Напряженность поля КРМ, Ек, |
|
|
| ||||||
|
|
не менее: |
|
|
| ||||||
|
|
на границах ЗД КРМ |
мкВ/м |
40 |
40 | ||||||
|
|
на глиссаде в пределах сектора |
|
|
| ||||||
|
|
курса на удалении 18,0 км от АФУ |
|
|
| ||||||
|
|
КРМ, не менее |
мкВ/м |
90 |
90 | ||||||
|
10 |
АХ КРМ (характер изменения |
% |
|
| ||||||
|
|
М) в секторах: |
|
|
| ||||||
|
|
от ЛК до углов, где М = 20,5% |
|
Монотонное увеличение | |||||||
|
|
от углов с М = 20,5% до углов |
|
|
| ||||||
|
|
|
|
20,5 | |||||||
|
|
от углов, равных |
|
|
| ||||||
|
|
равных |
|
Не уменьшается до |
нуля и не меняет знак | ||||||
|
11 |
ВСП при крене ВСЛ, равном |
|
|
| ||||||
|
|
|
|
|
| ||||||
|
|
горизонтальной плоскости на |
% |
|
| ||||||
|
|
линии курса, не более |
(мкА) |
( |
( | ||||||
|
12 |
САК КРМ при: |
|
|
| ||||||
|
|
не более |
м |
|
| ||||||
|
|
изменении чувствительности к |
|
|
| ||||||
|
|
номинального значения, не более |
% |
|
| ||||||
|
13 |
Опознавание |
первая И, 2, 3 код аэр. |
Четкая, ясная слышимость |
Четкая, ясная слышимость | ||||||
|
Глиссадный радиомаяк | ||||||||||
|
14 |
Номинальный угол глиссады, |
градус |
2-4 |
2-4 | ||||||
|
15 |
Точность юстировки и |
отн. ед. |
|
| ||||||
|
16 |
Высота опорной точки РМС-"Т" |
м |
15,0 + 3,0 |
15,0 + 3,0 | ||||||
|
17 |
Номинальная чувствительность |
|
|
| ||||||
|
|
выше глиссады |
мин |
+ |
+ | ||||||
|
|
ниже глиссады |
мин |
- |
- (0,12 | ||||||
|
|
пределы поддержания |
% |
|
| ||||||
|
18 |
Асимметрия крутизны характеристики ГРМ, Акг |
% |
19 |
19 | ||||||
|
19 |
Амплитуда искривлений ЛГ (структура глиссады - |
|
|
| ||||||
|
|
от границы ЗД до т. "А", не более |
РГМ |
0,035 (50,0) |
0,035 (50,0) | ||||||
|
|
от т. "А" до т. "В", не более |
|
0,035 (50,0) |
линейное | ||||||
|
|
от т. "А" до т. "С", не более |
|
0,035 (50,0) |
0,023 (32,0) | ||||||
|
|
от т. "В" до т. "Т", не более |
|
- |
0,023 (32,0) | ||||||
|
20 |
ЗД ГРМ в: |
|
|
| ||||||
|
|
горизонтальной плоскости |
|
|
| ||||||
|
|
(ЗДгг) в секторе |
км |
18,0 |
18,0 | ||||||
|
|
вертикальной плоскости (ЗДгв) в секторе с углами: |
|
|
| ||||||
|
|
верхней границы |
градус |
1,75 |
1,75 | ||||||
|
|
нижней границы |
градус |
0,45 |
0,45 | ||||||
|
21 |
Напряженность поля (Ег) в ЗД ГРМ, не менее |
мкВ/м |
400 |
400 | ||||||
|
22 |
УХ ГРМ в секторах, |
|
|
| ||||||
|
|
вверх: |
|
|
| ||||||
|
|
от линии глиссады до угла, |
|
|
| ||||||
|
|
где РГМ равна 0,175 |
|
Плавное |
Плавное | ||||||
|
|
от угла, где PГM равна 0,175, |
|
|
| ||||||
|
|
до угла, равного 1,75 |
РГМ |
0,175 |
0,175 | ||||||
|
|
вниз: |
|
|
| ||||||
|
|
от линии глиссады до угла, где РГМ равна - 0,22 |
|
Плавное |
Плавное | ||||||
|
|
от угла, где РГМ равна -0,22, до угла, равного 0,45 |
|
-0,22 |
-0,22 | ||||||
|
|
Если плавное уменьшение РГМ не достигается под углом 0,45 |
|
|
| ||||||
|
23 |
САК ГРМ при: |
|
|
| ||||||
|
|
смещении средней ЛГ ( |
отн.ед. |
|
| ||||||
|
|
изменении чувствительности к смещению (Sr) от номинального значения ( |
% |
|
| ||||||
|
Маркерный радиомаяк | ||||||||||
|
24 |
ЗД МРМ на ЛК и ЛГ: |
|
| |||||||
|
|
дальний МРМ |
м |
600 | |||||||
|
|
ближний МРМ |
м |
300 | |||||||
|
25 |
Напряженность поля (Ем): |
|
| |||||||
|
|
на границах ЗД МРМ, не менее |
мВ/м |
1,5 | |||||||
|
|
в ЗД МРМ составляет, не менее |
мВ/м |
3,0 | |||||||
|
26 |
Манипуляция |
Четкая, ясная слыши- |
Правильная манипуляция. Четкая, ясная слышимость | |||||||
Таблица 2.1. PMA/VOR
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
|
1 |
2 |
3 |
4 |
|
1 |
ЗД PMA/VOR в: горизонтальной плоскости |
км |
ЗД PMA/VOR определяется ЭД на конкретный тип радиомаяка. |
|
|
вертикальной плоскости |
град. |
Обеспечивает удовлетворительный прием сигнала на борту ВС для всех углов места между 0° и 40°' (зависит от эффективной мощности излучения PMA/VOR, см. рисунок 3 приложения N 4) |
|
|
радиус нерабочей зоны (Rнз) |
м |
Rнз |
|
|
минимально допустимая напряженность электромагнитного поля радиомаяка в ЗД PMA/VOR (E |
мкВ/м |
90 (допускается меньшая напряженность поля при условии нормального функционирования бортовых приемников рейсовых ВС) |
|
2 |
Ошибка информации о пеленге* (точность структуры курса) для вероятности 0,95, не более: |
|
|
|
________________ | |||
|
|
юстировка, |
градус |
|
|
|
искривления курсовой линии, |
градус |
|
|
|
неровности и зубчатость |
градус |
|
|
|
в опорной контрольной точке |
градус |
|
|
3 |
Средняя ошибка информации о пеленге ( |
градус |
|
|
________________ | |||
|
4 |
Средняя ошибка информации о пеленге при использовании PMA/VOR для захода ВС на посадку ( |
градус |
|
|
5 |
Непрерывность информации о пеленге |
- |
Не более пяти кратковременных пропаданий (1-2 с) информации в ЗД |
|
6 |
ВСП PMA/VOR для крена ВС, равного |
градус |
|
|
7 |
Курсовая чувствительность |
градус |
20,0 |
|
8 |
Опознавание |
код |
Правильность присвоенного кода, ясная слышимость |
|
9 |
Полетопригодность PMA/VOR |
пригоден к полетам |
Вывод делается БО АЛК и КВС, осуществляющими проверку |
|
Таблица 2.2. Точность радионавигации по маякам PMA/VOR | ||||
|
N п/п |
Принятая точность радионавигации |
Ширина воздушных трасс |
Макс, допустимая ошибка радиального сигнала PMA/VOR |
Примечание |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
Российская Федерация |
10,0 км |
|
Воздушные трассы общего назначения |
|
2 |
Российская Федерация |
4,0 км |
|
Коридоры входа и выхода |
|
3 |
RNP 5 |
10 м.миль (18,5 км) |
|
Стандартная по ИКАО/IСАО |
|
4 |
RNP 4 |
8 м.миль (14,8 км) |
|
В странах Evrocontrol до 1 марта 2003 года |
|
5 |
RNP 1 |
2 м.миль (3,7 км) |
|
В странах Evrocontrol с 1 марта 2003 года |
Примечание. Анализ точности структуры курсовой линии (амплитуды искривления (![]() п) и отклонений типа неровностей и зубчатости (
п) и отклонений типа неровностей и зубчатости (![]() п) или их комбинации) проводится по результатам летной проверки радиомаяка PMA/VOR и зависит от технических характеристик аппаратуры летного контроля.
п) или их комбинации) проводится по результатам летной проверки радиомаяка PMA/VOR и зависит от технических характеристик аппаратуры летного контроля.
Современная аппаратура летного контроля автоматически выполняет анализ структуры линии курса радиомаяка PMA/VOR и выдает результаты проверки в виде графиков и таблицы измерений амплитуды искривления и отклонений типа неровностей и зубчатости или их комбинации на стандартном листе.
При ручном методе измерения амплитуды искривления и отклонений типа неровностей и зубчатости или их комбинации (точности структуры курсовой линии) на записи этих отклонений вдоль каждого отрицательного и положительного пика отклонения от линии курса проводятся две касательные к ним линии. Расстояние между двумя этими линиями, измеренное в градусах или микроамперах, представляет общую величину отклонений от линии курса, а половина этой величины соответствует положительному или отрицательному отклонению. На одинаковом расстоянии от этих двух линий проводится третья линия, которая является средней линией курса, на основании которой измеряется положение (юстировка) линии курса. Ошибка юстировки линии курса (![]() П) вычисляется по записям сигнала курсового приемника в любой точке, где на записи имеется точная отметка прохода ВС над контрольной точкой (наземным контрольным ориентиром). Ошибка юстировки указывается с точностью до десятых долей градуса. Ошибка юстировки (разъюстировка) в направлении по часовой стрелке считается положительной, т.е. если магнитный азимут измеренной контрольной точки (ориентира) больше, чем у электронного радиала, то погрешность является положительной и наоборот.
П) вычисляется по записям сигнала курсового приемника в любой точке, где на записи имеется точная отметка прохода ВС над контрольной точкой (наземным контрольным ориентиром). Ошибка юстировки указывается с точностью до десятых долей градуса. Ошибка юстировки (разъюстировка) в направлении по часовой стрелке считается положительной, т.е. если магнитный азимут измеренной контрольной точки (ориентира) больше, чем у электронного радиала, то погрешность является положительной и наоборот.
Искривления курсовой линии, а также отклонения типа неровностей и зубчатости проявляются в виде колебаний указателя индикатора курсовых отклонений.
Отклонения типа неровностей проявляются в виде серии резких нерегулярных колебаний, отклонения типа зубчатости имеют вид серии плавных ритмических колебаний.
Искривления курсовой линии подобны отклонениям типа зубчатости, но отличаются по частоте. Их частота такова, что ВС может следовать за этими искривлениями, если указатель индикатора курсовых отклонений удерживать в центре шкалы навигационного прибора.
При анализе искривлений курсовой линии необходимо учитывать изменения курса ВС и отклонения юстировки радиалов азимутального радиомаяка PMA/VOR. В некоторых случаях искривления трудно распознать, особенно в тех местах, где отсутствуют точные наземные ориентиры (контрольные точки) или другие средства точного определения местоположения ВС. Например, плавное отклонение линии курса на участке протяженностью 3,7 км (2,0 м. мили) будет проявляться как искривление курсовой линии для ВС, осуществляющего летную проверку с путевой скоростью 250 км/час (140 узлов). В то же время ВС, выполняющее полет с более высокой скоростью, не сможет выявить такое плавное отклонение линии курса на этом небольшом участке, как искривление, если только это искривление не будет иметь гораздо большую протяженность. Поэтому при анализе искривлений курсовой линии следует принимать во внимание скорости и эшелоны полетов рейсовых воздушных судов.
Применительно к критериям, относящимся к искривлениям курсовой линии, следует учитывать допуск на искривления, который равен 3,5°, а также максимальное расстояние, на которое ВС может отклониться от установленной линии курса при наличии искривлений. Для выполнения этих требований необходимо, чтобы величина смещения курса за счет искривления не превышала установленные 3,5° либо относительно скорректированного магнитного азимута, либо относительно средней линии курса, обеспечиваемой радиомаяком. Для пояснения ниже приводится два примера и рисунки 1 и 2 настоящего приложения.
1. Радиал, для которого ошибка юстировки равна 0°: по обе стороны от средней линии курса разрешается максимальный допуск на искривления, равный 3,5°, независимо от того, будет ли это однократное искривление или несколько искривлений.
2. Радиал, для которого погрешность юстировки равна +2,0°: допускается дальнейшее отклонение линии курса в результате искривления на величину +1,5°. Таким образом, результирующее отклонение от правильного магнитного азимута составит +3,5°. Поскольку допустимое отклонение от линии курса за счет искривлений составляет 3,5° относительно средней линии курса, то результирующее отклонение от правильного магнитного азимута составит минус 1,5°.
В тех случаях, когда отклонения типа неровностей или типа зубчатости либо их сочетание накладываются на искривления курсовой линии, средняя линия курса определяется путем усреднения суммарной амплитуды таких искажений. Это может привести к кратковременному смещению линии курса на 6,5°, если отклонения типа неровностей и зубчатости, равные ![]() 3,0°, накладываются на искривление линии курса, равное 3,5°. Такой случай крайне маловероятен, тем не менее в зонах, где это может произойти, необходимо рассмотреть вопрос о пригодности использования в этих зонах радиомаяка PMA/VOR для аэронавигации.
3,0°, накладываются на искривление линии курса, равное 3,5°. Такой случай крайне маловероятен, тем не менее в зонах, где это может произойти, необходимо рассмотреть вопрос о пригодности использования в этих зонах радиомаяка PMA/VOR для аэронавигации.
Критические величины для отклонений типа неровностей и зубчатости не следует применять непосредственно со знаком плюс или минус, а рассматривать их как максимальное отклонение от курса. Отклонения типа неровностей и зубчатости, как правило, появляются в виде серий. Однако если очевидно, что быстрое отклонение происходит только с одной стороны от линии курса, а не проявляется в виде серии отклонений, то критическая величина отклонения должна применяться соответственно со знаком плюс или минус (см. рисунки 1 и 2 приложения N 4).
Таблица 2.3. РМД/DME
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
|
1 |
2 |
3 |
4 |
|
1 |
ЗД РМД/DME в режимах: |
|
Не менее ЗД PMA/VOR |
|
|
навигационный |
км |
(зависит от эффективной мощности излучения РМД, см. рисунок 4 приложения N 4). |
|
|
посадочный |
км |
Не менее 50 на высоте 600 м (в вертикальной плоскости от 0° до 20°) |
|
2 |
Ошибка информации по дальности ( |
|
|
|
|
навигационный, не более |
м |
|
|
|
посадочный, не более |
м |
|
|
5 |
Непрерывность информации о дальности |
|
Не более пяти кратковременных пропаданий (1-2 с) информации в зоне действия |
Таблица 2.4. ДВОР/DVOR
|
п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
|
1 |
2 |
3 |
4 |
|
1 |
ЗД ДВОР/DVOR: |
|
ЗД ДВОР/DVOR определяется ЭД |
|
|
в горизонтальной плоскости |
км |
на конкретный тип радиомаяка. |
|
|
в вертикальной плоскости |
|
Обеспечивает удовлетворительный прием сигнала на борту ВС для всех углов места между 0° и 40° (зависит от эффективной мощности излучения радиомаяка, см. рисунок 3 приложения N 4) |
|
|
радиус нерабочей зоны (Rнз) |
м |
Rнз |
|
|
минимально допустимая напряженность электромагнитного поля радиомаяка в ЗД ДВОР/DVOR (Е |
мкВ/м |
90,0 (допускается меньшая напряженность поля при условии нормального функционирования бортовых приемников рейсовых ВС) |
|
2 |
Ошибка информации об азимуте/пеленге ( |
градус |
|
|
3 |
Нестабильность информации об азимуте/пеленге в месте установки контрольной антенны, не более |
градус |
|
|
4 |
Непрерывность информации об азимуте/пеленге на борту ВС |
|
Не более пяти кратковременных пропаданий (1-2 с) информации в ЗД |
|
5 |
ВСП ДВОР/DVOR для крена ВС, равного |
градус |
|
|
6 |
Курсовая чувствительность |
градус |
20,0 |
|
7 |
Опознавание |
код |
Правильность присвоенного кода, ясная слышимость |
|
8 |
Возможность использования маяка ДВОР/DVOR для обеспечения полетов |
пригоден к полетам |
Вывод делается БО АЛК и КВС, осуществляющими проверку |
Таблица 2.5. РСБН
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования к параметрам и характеристикам |
|
1 |
2 |
3 |
4 |
|
1 |
ЗД РСБН в горизонтальной плоскости: |
|
|
|
|
дальность действия максимальная |
км |
|
|
|
на высоте полета, равной 6000 м |
км |
250 |
|
2 |
ЗД РСБН в вертикальной плоскости |
градус |
0-45,0 |
|
3 |
Радиус нерабочей зоны (Rнз) |
км |
Rнз |
|
4 |
Непрерывность информации об азимуте/дальности (А, Д) |
|
Не более пяти кратковременных пропаданий (1-2 с) информации об А и/или Д в ЗД радиомаяка |
|
5 |
Ошибка информации на борту ВС: |
|
|
|
|
по азимуту ( |
градус |
|
|
|
по дальности ( |
км |
|
|
6 |
Ошибка определения координат ВС на ИКО (ВИКО) по: |
|
|
|
|
азимуту ( |
градус |
|
|
|
дальности ( |
км |
3% от дальности до ВС |
|
7 |
Опознавание |
код |
Правильность присвоенного кода, ясная слышимость |
Таблица 2.6. Дальность действия РСБН с учетом углов закрытия
|
Величина угла закрытия, град., мин |
Высота полета ВС, м | |||||
|
|
400 |
1000 |
3000 |
4000 |
6000 |
10000 |
|
|
Дальность действия радиомаяка, км | |||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
0°00' |
82 |
112,9 |
195,5 |
225,8 |
276.5 |
357 |
|
0°10' |
61 |
100 |
175 |
204 |
256 |
342 |
|
0°20' |
47 |
84 |
159 |
188 |
238 |
324 |
|
0°30' |
35 |
73 |
142 |
174 |
223 |
308 |
|
0°40' |
29 |
63 |
134 |
162 |
209 |
292 |
|
0°50' |
24 |
54 |
124 |
151 |
197 |
279 |
|
1°00' |
21 |
49 |
115 |
140 |
186 |
267 |
|
1°10' |
19 |
45 |
106 |
130 |
175 |
253 |
|
1°20' |
17 |
41 |
98 |
122 |
165 |
240 |
|
1°30' |
15 |
37 |
92 |
114 |
155 |
229 |
|
1°40' |
13 |
33 |
84 |
106 |
146 |
218 |
|
1°50' |
12 |
30 |
79 |
100 |
138 |
209 |
|
2°00' |
11 |
28 |
74 |
94 |
131 |
199 |
|
2°10' |
9 |
26 |
69 |
89 |
125 |
191 |
|
2°20' |
- |
24 |
65 |
83 |
119 |
183 |
|
2°30' |
- |
23 |
62 |
80 |
115 |
177 |
|
2°40' |
- |
21 |
59 |
77 |
109 |
169 |
|
3°00' |
8 |
19 |
53 |
68 |
98 |
154 |
|
3°20' |
- |
17 |
48 |
62 |
91 |
142 |
|
3°40' |
- |
15 |
45 |
57 |
84 |
133 |
|
4°00' |
6 |
14 |
41 |
52 |
77 |
123 |
Примечание. Допускается уменьшение зоны действия РСБН, осуществляемое путем снижения выходной мощности передатчиков радиомаяка на 25% от номинальной.
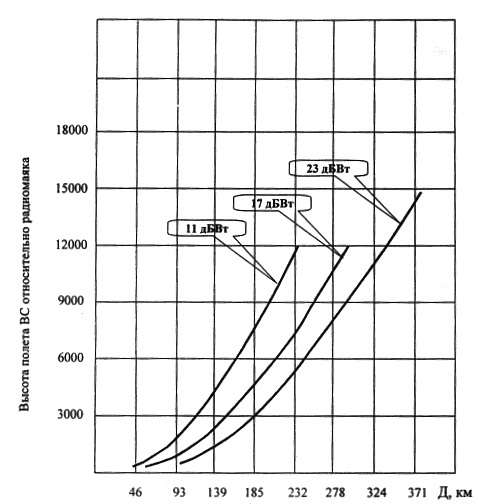
Наклонная дальность до АФУ PMA/VOR
Рисунок 3. График зависимости дальности действия PMA/VOR от высоты
полета ВС для различной эффективности излучаемой мощности радиомаяка.
При других значениях мощности дальность действия определяется путем
экстраполяции графиков на высоте проведения проверки.
Наклонная дальность до АФУ РМД
Рисунок 4. График зависимости дальности действия РМД/DME от высоты полета ВС
для различной эффективности излучаемой мощности радиомаяка. При других значениях мощности дальность действия определяется путем экстраполяции графиков на высоте проведения проверки
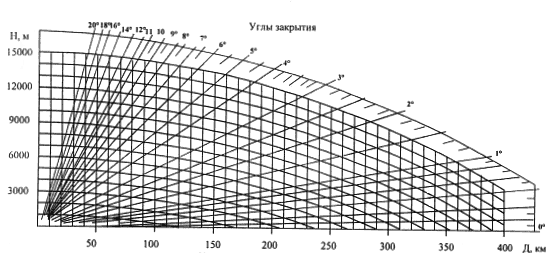
Наклонная дальность до антенны РСБН
Таблица 3.1. ОСП
|
N |
Наименование параметра, характеристики |
Единица измере- |
Требования и допуски к параметрам и характеристикам |
|
1 |
2 |
3 |
4 |
|
Приводная радиостанция | |||
|
1 |
ЗД ПРС/NDB для обеспечения полетов: |
|
|
|
|
по воздушным трассам |
км |
150,0 |
|
|
в районе аэродрома |
км |
50,0 |
|
2 |
Опознавание |
код Морзе |
Правильная манипуляция, четкая слышимость |
|
Маркерный радиомаяк | |||
|
3 |
ЗД МРМ на ЛК и ЛГ: |
|
|
|
|
ДМРМ/ОМ |
м (фут) |
600 |
|
|
БМРМ/ММ |
м (фут) |
300 |
|
|
ВнМРМЛМ |
м (фут) |
150 |
|
4 |
Напряженность поля МРМ (Ем): |
|
|
|
|
на границах ЗД, не менее |
мВ/м |
1,5 |
|
|
внутри ЗД составляет, не менее |
мВ/м |
3,0 |
|
5 |
Манипуляция |
код Морзе |
Правильная манипуляция, ясная слышимость |
|
6 |
Оценка возможности использования ОСП для обслуживания полетов (полетопригодность ОСП) |
ОСП |
Отсутствие колебаний стрелок индикатора APК/ADF и увода ВС с посадочного курса более чем на 5°. Вывод делается БО АЛК и КВС: ОСП пригодно к обеспечению полетов |
Таблица 3.2. ОПРС/NDB с МРМ
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам и характеристикам |
|
1 |
2 |
3 |
4 |
|
Приводная радиостанция | |||
|
1 |
ЗД ПРС/NDB для обеспечения полетов: |
|
|
|
|
по воздушным трассам |
км |
150,0 |
|
|
в районе аэродрома |
км |
50,0 |
|
2 |
Опознавание |
код Морзе |
Правильная манипуляция, ясная слышимость |
|
Маркерный радиомаяк | |||
|
|
ЗД трассового МРМ |
м |
Зависит от высоты полета ВС, |
|
4 |
Напряженность поля МРМ (Ем) на границах ЗД, не менее |
мВ/м |
1,5 |
|
5 |
Манипуляция |
код Морзе |
Правильная манипуляция, ясная слышимость |
|
6 |
Оценка возможности использования ОПРС для обслуживания полетов (полетопригодность ОПРС) |
ОПРС |
Отсутствие колебаний стрелок индикатора APК/ADF и увода ВС с курса полета (маршрута) более чем на 5°. Вывод делается БО АЛК и КВС: ОПРС пригодна для обеспечения полетов |
Таблица 3.3. АРП/VDF
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
Примечание |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
ЗД АРП в горизонтальной плоско- |
|
|
|
|
|
на высотах: |
|
|
|
|
|
1000 м, не менее |
км |
80,0 |
|
|
|
3000 м, не менее |
км |
150,0 |
|
|
2 |
ЗД АРП в вертикальной плоскости: |
|
|
|
|
|
с узким сектором, до |
градус |
45,0 |
|
|
|
с широким сектором, не менее |
градус |
45,0 |
|
|
3 |
Среднеквадратическая ошибка |
градус |
1,5 |
Для АРП-75 |
|
4 |
Оценка возможности использования |
АРП |
полетопригодность |
Вывод |
Таблица 4.1. ПРЛ/PAR
|
N п/п |
Наименование параметра, характеристики |
Единица |
Требования и допуски к параметрам |
Примечание |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
ЗД ПРЛ |
|
|
|
|
|
дальность действия, не менее |
|
|
|
|
|
сектор обзора пространства: |
км |
17,0 |
|
|
|
антенна курса по азимуту, не менее |
градус |
20,0 |
|
|
|
антенна глиссады по углу места, |
|
|
|
|
|
не менее |
градус |
7,0 |
|
|
2 |
Ошибка определения информации: |
|
|
|
|
|
по курсу, не более |
мин |
9 или |
Принимается большая величина |
|
|
по глиссаде, не более |
мин |
6 или |
|
|
|
по дальности, не более |
м |
30,0 + 0,03 Хтп |
|
|
3 |
Разрешающая способность по: |
|
|
В соответствии с ЭД ПРЛ |
|
|
курсу, не более |
градус |
1,2 |
|
|
|
углу места, не более |
градус |
0,6 |
|
|
|
дальности, не более |
м |
120,0 |
|
|
4 |
Выдача информации на рабочие места диспетчеров УВД |
Наличие на экранах индикаторов ПРЛ информации от ВС в зоне обслуживания. | ||
Условные обозначения:
X тп - расстояние от ВС до точки приземления, м.
Д![]() - расстояние от АФУ ПРЛ до ВС, м.
- расстояние от АФУ ПРЛ до ВС, м.
Z - боковое отклонение ВС от заданной траектории маневрирования (ЛК), м.
Y - вертикальное отклонение ВС от заданной траектории снижения (ЛГ), м.
Таблица 4.2. ОРЛ - А
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам | ||
|
|
|
|
Вариант Б1 |
Вариант Б2 | |
|
1 |
2 |
3 |
4 |
5 | |
|
1 |
ЗД ОРЛ-А в горизонтальной плоскости (дальность действия): |
|
|
| |
|
|
максимальной, Н |
км |
160,0 |
100,0 | |
|
|
промежуточной, Н |
км |
120,0 |
50,0 | |
|
|
минимальной, Н |
км |
35,0 |
20,0 | |
|
|
минимальная, не более |
км |
2,0 |
1,5 | |
|
|
угол обзора антенны РЛС |
градус |
360 |
360 | |
|
2 |
Вероятность правильного обнаружения ВС* на контролируемых маршрутах, |
|
|
| |
|
|
не менее: по первичному каналу |
|
0,8 |
0,8 | |
|
|
|
по вторичному каналу |
|
0,9 |
0,9 |
|
________________ | |||||
|
3 |
Выдача информации на рабочие места диспетчеров УВД |
Наличие на экранах индикаторов РЛС информации от ВС в зоне обслуживания. | |||
|
4 |
Среднеквадратическая ошибка определения координат ВС по выходу с АПОИ, не более: |
|
|
| |
|
|
азимута |
градус |
0,4 |
0,4 | |
|
|
дальности |
м |
200,0 |
200,0 | |
|
5 |
Разрешающая способность: |
|
Определяется ЭД на конкретный тип РЛС | ||
|
|
по азимуту, не более |
градус |
| ||
|
|
по дальности, не более |
м |
| ||
Таблица 4.3. ОРЛ-Т
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
Примечание | |||||
|
1 |
2 |
3 |
4 |
5 | |||||
|
1 |
ЗД ОРЛ-Т в горизонтальной плоскости (дальность действия): |
|
|
Дальность действия РЛС определяется требованиями ЭД на конкретный тип ОРЛ-Т и зависит от ЭОП ВС | |||||
|
|
максимальная, не менее, |
|
|
| |||||
|
|
на высотах: |
|
|
| |||||
|
|
максимальной, Н |
км |
* |
| |||||
|
|
промежуточной, Н |
км |
* |
| |||||
|
|
минимальной, Н |
км |
* |
| |||||
|
|
минимальная, не более |
км |
* |
| |||||
|
|
угол обзора антенны РЛС |
градус |
360 |
| |||||
|
2 |
Вероятность обнаружения ВС на контролируемых маршрутах, не менее |
|
0,8 |
При вероятности ложной тревоги, равной 10 | |||||
|
3 |
Выдача информации на рабочие места диспетчеров УВД |
Наличие на экранах индикаторов РЛС информации от ВС в зоне обслуживания. | |||||||
|
4 |
Среднеквадратическая ошибка определения координат ВС по выходе с АПОИ, не более: |
|
|
| |||||
|
|
азимута |
градус |
0,25 |
0,25 | |||||
|
|
дальности |
м |
300,0 |
300,0 | |||||
|
5 |
Разрешающая способность: |
|
Определяется ЭД на конкретный тип РЛС | ||||||
|
|
по азимуту, не более |
градус |
| ||||||
|
|
по дальности, не более |
м |
| ||||||
________________
* Дальность действия РЛС определяется требованиями эксплуатационной документации (ЭД) на конкретный тип ОРЛ-Т и зависит от эффективной отражающей поверхности (ЭОП) ВС.
Таблица 4.4. ВРЛ
|
N п/п |
Наименование параметра, характеристики |
Едини- |
Требования и допуски к параметрам | ||
|
|
|
|
трассо- |
аэродромный | |
|
|
|
|
|
Вариант Б1 |
Вариант Б2 |
|
1 |
2 |
3 |
4 |
5 |
6 |
|
1 |
Режим работы |
|
"УВД" и "RBS" | ||
|
2 |
ЗД ВРЛ в горизонтальной плоскости (дальность действия): |
|
|
|
|
|
|
максимальной, Н |
км |
* |
* |
* |
|
|
промежуточной, Н |
км |
* |
* |
* |
|
|
минимальной, Н |
км |
* |
* |
* |
|
|
минимальная дальность действия РЛС при снижении на посадочном курсе, не более |
км |
- |
2,0 |
1,5 |
|
|
угол обзора антенны РЛС |
градус |
360 |
360 |
360 |
|
3 |
Вероятность обнаружения ВС на контролируемых маршрутах, не менее |
|
0,9 |
0,9 |
0,9 |
|
4 |
Выдача информации на рабочие места диспетчеров УВД |
Наличие на экранах индикаторов РЛС информации от ВС в зоне обслуживания | |||
|
5 |
Среднеквадратическая ошибка определения координат ВС по выходе с АПОИ, не более: |
|
|
|
|
|
|
азимута |
градус |
0,25 |
0,2 |
0,2 |
|
|
дальности |
м |
300 |
200 |
200 |
|
6 |
Разрешающая способность*: |
|
| ||
|
|
по азимуту, не более |
градус |
Определяется ЭД на конкретный тип ВРЛ | ||
|
|
по дальности, не более |
м |
| ||
________________
* Дальность действия РЛС определяется требованиями ЭД на конкретный тип ВРЛ.
Таблица 5.1. АВЭС
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Требования и допуски к параметрам |
|
1 |
Качество связи "воздух-земля" |
оценка |
В пределах границ ЗД соответствующего пункта УВД ясная слышимость, разборчивость речи не ниже оценки "удовлетворительно" |
|
2 |
Полетопригодность АВЭС (возможность использования средства радиосвязи для обслуживания воздушного движения) |
средство АВЭС пригодно к полетам |
Работа каналов авиационной воздушной электросвязи осуществляется без взаимовлияния |
Таблица 5.2. АВЭС. Оценка разборчивости речи
|
N п/п |
Оценка |
Требования и допуски к параметрам |
|
1 |
"Отлично" |
Понимание передаваемого сообщения без малейшего напряжения |
|
2 |
"Хорошо" |
Понимание передаваемого сообщения без затруднений |
|
3 |
"Удовлетворительно" |
Понимание передаваемого сообщения с напряжением внимания, с переспросами и повторами |
|
4 |
"Неудовлетворительно" |
Полная неразборчивость передаваемого сообщения |
Таблица 6. 1. Системы ССО, СТО
|
N п/п |
Наименование параметра, характеристики |
Ед. изм. |
Требования к параметрам и характеристикам | |||||||
|
|
|
|
ОМИ |
ОВИ-I |
ОВИ-II |
ОВИ-III | ||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | ||||
|
1 |
Схема расположения огней системы ССО (маркеров СТО) |
|
Соответствие расположения и цвета огней схеме, утвержденной для систем ССО (см. приложение N 3) | |||||||
|
2 |
Объем негорящих (отсутствующих) огней в подсистемах: |
% |
|
|
|
| ||||
|
|
огни приближения и СГ |
|
|
15 |
5 |
5 | ||||
|
|
боковые огни приближения |
|
- |
- |
5 |
5 | ||||
|
|
входные огни |
|
- |
15 |
5 |
5 | ||||
|
|
посадочные огни и огни знака приземления |
|
- |
15 |
5 |
5 | ||||
|
|
ограничительные огни |
|
- |
15 |
25 |
25 | ||||
|
|
огни зоны приземления |
|
- |
- |
10 |
10 | ||||
|
|
осевые огни ВПП |
|
- |
5* |
5 |
5 | ||||
|
3 |
Яркость огней в подсистемах |
|
Яркость огней в подсистемах - одинаковая | |||||||
|
4 |
Световая маркировка осевых огней ВПП на участках*: |
|
|
| ||||||
|
________________ | ||||||||||
|
|
300 м от конца ВПП |
|
- |
Красные огни | ||||||
|
|
300-900 м от конца ВПП |
|
- |
Чередующиеся красные и белые огни или попарное чередование красных и белых огней | ||||||
|
|
остальная часть ВПП |
|
- |
Белые огни | ||||||
|
5 |
Работа устройств дистанционного управления |
Отсутствие темпового промежутка при переключениях групп огней системы ССО | ||||||||
|
6 |
Правильность набора групп и яркости огней с ПОУ диспетчера |
|||||||||
|
7 |
Углы системы визуальной индикации глиссады (ГО) для групп**: |
угловые минуты |
|
| ||||||
|
________________ | ||||||||||
|
|
N 1 |
|
- 5 |
-30 | ||||||
|
|
N 2 |
|
+15 |
-10 | ||||||
|
|
N 3 |
|
|
+10 | ||||||
|
|
N 4 (ближайшая к ВПП) |
|
|
+30 | ||||||
|
8 |
Время переключения огней при переходе на автономный источник электроснабжения, не более |
с |
60 |
15 | ||||||
|
9 |
Соответствие траекторий полета ВС при заходе на посадку с использованием визуальной индикации глиссады (световой глиссады) и глиссады РМС |
|
Визуальное наблюдение одного красного и одного белого огня |
Визуальное наблюдение двух красных и двух белых огней | ||||||
Таблица 6.2. ССО - регулирование яркости огней систем ОВИ-I, ОВИ-II, ОВИ-III
|
Метеорологическая дальность видимости, км (время суток) |
|
Ступени яркости огней,% | ||||||||
|
|
Номер группы (кнопки) |
Огни приближения |
Огни ВПП (входные, боковые, ограничительные) и КПТ |
Огни зоны при- |
Осе- |
Глис-сад- |
Ру- | |||
|
|
|
КО |
ПО |
КО |
ПО |
линзо- |
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
> 6 (ночь) |
1 |
30 |
-(1)* |
10 |
- |
1 |
1 |
1 |
10 |
30 |
|
|
|
|
|
|
(1)** |
|
|
|
|
|
|
6 |
2 |
100 |
-(1)* |
30 |
- |
3 |
1 |
1 |
10 |
30 |
|
> 8 (сумерки) |
|
|
|
|
(3)** |
|
|
|
|
|
|
4 |
3 |
100 |
3 |
30 |
3 |
3*** |
3 |
3 |
30 |
30 |
|
8 |
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
- |
10 |
30 |
10 |
10 |
10 |
10 |
30 |
100 |
|
|
5 |
- |
30 |
30 |
30 |
30 |
30 |
30 |
100 |
100 |
|
|
6 |
- |
100 |
30 |
100 |
100 |
100 |
100 |
100 |
100 |
________________
* В скобках указаны ступени яркости прожекторных огней приближения при отсутствии огней кругового обзора.
** В скобках указаны ступени яркости прожекторных входных и ограничительных огней ВПП при отсутствии огней кругового обзора.
***При схеме расположения огней приближения по центральному ряду (рисунки 4 и 6 приложения N 3). Допускается использование линзовых огней в 3 группе на 10% ступени яркости.
Примечание. В графе 11 таблицы 6.2 указаны рекомендуемые значения ступеней яркости рулежных огней. При использовании рулежных огней с силой света более 10 кд допускается использовать яркость на одну ступень ниже.
Таблица 6.3. ССО - регулирование яркости огней системы ОМИ
|
Метеорологическая дальность видимости, км (время суток) |
Ступени яркости огней (% силы света) | |||
|
|
Огни приближения и ВПП |
Рулежные огни и знаки* |
Глиссадные огни |
Огни ВПП высокой интенсивности |
|
1 |
2 |
3 |
4 |
5 |
|
> 4 (ночь) |
3-4 (10-30) |
4 (30) |
3 (10) |
1 (1) |
|
4 |
4-5 (30-100) |
4 (30) |
4 (30) |
2 (3) |
|
|
5 (100) |
5 (100) |
5 (100) |
3 (10) |
________________
* Допускается совместное регулирование яркости рулежных огней (знаков) и огней ВПП.
Примечания:
1. В графе 3 таблицы 6.3 указаны рекомендуемые значения ступеней яркости рулежных огней. При использовании рулежных огней с силой света более 10 кд допускается использовать яркость на одну ступень ниже.
2. В графе 5 таблицы 6.3 указаны ступени яркости огней ВПП из систем ССО с огнями высокой интенсивности при их совместном использовании с огнями приближения из системы ОМИ.
3. Схемы расположения огней системы ОВИ-I соответствуют рисункам 1-4 приложения N 3. Огни приближения системы ОВИ-I белого цвета устанавливаются на продолжении осевой линии ВПП на протяжении 900 м от порога ВПП (не менее 870 м) с продольными интервалами, равными 30![]() 3 м (рисунок 1 приложения N 3).
3 м (рисунок 1 приложения N 3).
Огни световых горизонтов белого цвета располагаются на линиях, перпендикулярных осевой линии ВПП, на расстоянии 300![]() 12 м (рисунок 1 приложения N 3) и на расстояниях от порога ВПП соответственно 150
12 м (рисунок 1 приложения N 3) и на расстояниях от порога ВПП соответственно 150![]() 6 м; 300
6 м; 300 ![]() 12 м; 450
12 м; 450 ![]() 18 м; 600
18 м; 600 ![]() 33 м; 750
33 м; 750 ![]() 55,5 м (рисунок 2 приложения N 3).
55,5 м (рисунок 2 приложения N 3).
Боковые огни ВПП системы ОВИ-I белого цвета устанавливаются по всей длине ВПП в виде двух параллельных рядов на равном расстоянии от осевой линии ВПП и не далее 3,0 м от края ВПП. На последних 600 м ВПП в направлении посадки боковые огни излучают желтый цвет. Огни в рядах размещаются с интервалами не более 60 м (рисунок 3 приложения N 3).
Входные огни зеленого цвета устанавливаются на линии, перпендикулярной осевой линии ВПП, не далее 3,0 м с внешней стороны от порога, двумя группами с интервалом между группами, соответствующим расстоянию между маркировочными полосами зоны приземления. При этом крайний входной огонь устанавливается на продолжении линии посадочных огней. Огни в группе устанавливаются с равными интервалами (рисунок 3 приложения N 3).
4. Схемы расположения огней систем ОВИ-II и ОВИ-III соответствуют рисункам 6-9 приложения N 3. Огни приближения и световых горизонтов - белого цвета на участке 300-900 м от порога ВПП устанавливаются на продолжении осевой линии ВПП на протяжении 900 м от порога ВПП (не менее 870 м) с продольными интервалами, равными 30![]() 3 м. Боковые огни приближения красного цвета на участке 300
3 м. Боковые огни приближения красного цвета на участке 300![]() 12 м (рисунок 6 приложения N 3).
12 м (рисунок 6 приложения N 3).
Огни световых горизонтов белого цвета располагаются на линиях, перпендикулярных осевой линии ВПП, на расстояниях от порога соответственно 150 ![]() 6 м; 300
6 м; 300![]() 12 м; 450
12 м; 450![]() 18 м; 600
18 м; 600![]() 33 м; 750
33 м; 750![]() 48 м. На участке протяженностью 270 м от порога ВПП система огней состоит из линейных огней приближения белого цвета, двух рядов боковых огней красного цвета. Два световых горизонта находятся на расстоянии 150
48 м. На участке протяженностью 270 м от порога ВПП система огней состоит из линейных огней приближения белого цвета, двух рядов боковых огней красного цвета. Два световых горизонта находятся на расстоянии 150![]() 6 м и 300
6 м и 300![]() 12 м от порога ВПП. Каждый линейный огонь приближения состоит не менее чем из четырех арматур, размещенных равномерно на расстоянии 1
12 м от порога ВПП. Каждый линейный огонь приближения состоит не менее чем из четырех арматур, размещенных равномерно на расстоянии 1![]() 0,1 м друг от друга. Продольное расстояние между огнями приближения составляет 30
0,1 м друг от друга. Продольное расстояние между огнями приближения составляет 30![]() 3 м или 25
3 м или 25![]() 2,5 м (рисунок 7 приложения N 3).
2,5 м (рисунок 7 приложения N 3).
Огни боковых рядов красного цвета размещаются симметрично осевой линии ВПП с продольными интервалами, равными интервалам между огнями приближения. Расстояние между внутренними арматурами боковых огней равно расстоянию между соответствующими арматурами огней зоны приземления и составляет 18-22,5 м.
Огни светового горизонта, расположенного на расстоянии 150![]() 6 м от порога ВПП, равномерно размещаются между линейными огнями приближения центрального ряда и рядами боковых огней концевой полосы безопасности в количестве не менее двух в группе. Световой горизонт, расположенный на расстоянии 300
6 м от порога ВПП, равномерно размещаются между линейными огнями приближения центрального ряда и рядами боковых огней концевой полосы безопасности в количестве не менее двух в группе. Световой горизонт, расположенный на расстоянии 300![]() 12 м от порога ВПП, имеет ширину 30
12 м от порога ВПП, имеет ширину 30![]() 3 м и состоит из огней, равномерно размещенных по обе стороны от линейных огней приближения (рисунок 7 приложения N 3).
3 м и состоит из огней, равномерно размещенных по обе стороны от линейных огней приближения (рисунок 7 приложения N 3).
Входные огни зеленого цвета устанавливаются на линии, перпендикулярной осевой линии ВПП, не далее 3,0 м с внешней стороны от порога, равномерно между рядами посадочных огней ВПП с интервалом 3 ![]() 0,3 м, при этом крайние входные огни устанавливаются на продолжении линии посадочных огней (рисунок 8 приложения N 3).
0,3 м, при этом крайние входные огни устанавливаются на продолжении линии посадочных огней (рисунок 8 приложения N 3).
Боковые огни ВПП системы ОВИ-II и ОВИ-III белого цвета устанавливаются по всей длине ВПП в виде двух параллельных рядов на равном расстоянии от осевой линии ВПП и не далее 3,0 м от края ВПП. На последних 600 м ВПП в направлении посадки боковые огни излучают желтый цвет. Огни в рядах размещаются с интервалами не более 60 м (рисунок 8 приложения N 3).
Ограничительные огни красного цвета устанавливаются на линии, перпендикулярной осевой линии ВПП, на расстоянии не более 3 м с внешней стороны от конца ВПП. Огни устанавливаются по всей ширине ВПП с интервалом через один входной огонь. Это же количество ограничительных огней может располагаться двумя группами с интервалом между группами не более половины расстояния между рядами посадочных огней (рисунок 8 приложения N 3).
Осевые огни ВПП устанавливаются на осевой линии по всей длине взлетно-посадочной полосы с интервалом 15![]() 1,5 м и состоят из огней:
1,5 м и состоят из огней:
красного цвета на участке 300 м от конца ВПП;
чередующихся огней красного и белого цвета или по два красных и два белых на участке 300-900 м от конца ВПП;
белого цвета на остальном участке ВПП (рисунок 8 приложения N 3).
Огни зоны приземления белого цвета устанавливаются на участке первых 900![]() 30 м от порога ВПП в виде двух продольных рядов линейных огней, симметричных относительно осевой линии ВПП (рисунок 8). Расстояние между внутренними огнями рядов линейных огней составляет 18-22,5 м. Каждый линейный огонь состоит из трех арматур при расстоянии между ними 1,5
30 м от порога ВПП в виде двух продольных рядов линейных огней, симметричных относительно осевой линии ВПП (рисунок 8). Расстояние между внутренними огнями рядов линейных огней составляет 18-22,5 м. Каждый линейный огонь состоит из трех арматур при расстоянии между ними 1,5![]() 0,1 м и имеет общую ширину 3
0,1 м и имеет общую ширину 3![]() 0,2 м. Продольное расстояние между огнями составляет 30
0,2 м. Продольное расстояние между огнями составляет 30 ![]() 3,0 м (допускается продольное расстояние 25
3,0 м (допускается продольное расстояние 25![]() 2,5 м).
2,5 м).
5. Схемы расположения огней системы ОМИ соответствует рисункам 11-14 приложения N 3. Огни приближения системы ОМИ (одинарные или линейные) белого цвета устанавливаются на продолжении осевой линии ВПП на протяжении не менее 900 м от порога ВПП с продольным интервалом между огнями, равным 60![]() 5 м (рисунок 11 приложения N 3). На ряде аэродромов протяженность линии огней приближения системы ОМИ составляет 420 м (рисунок 12 приложения N 3). Световой горизонт белого цвета располагается на расстоянии, равном 300
5 м (рисунок 11 приложения N 3). На ряде аэродромов протяженность линии огней приближения системы ОМИ составляет 420 м (рисунок 12 приложения N 3). Световой горизонт белого цвета располагается на расстоянии, равном 300![]() 12 м от порога ВПП (рисунки 11 и 12 приложения N 3). Ширина светового горизонта составляет 30
12 м от порога ВПП (рисунки 11 и 12 приложения N 3). Ширина светового горизонта составляет 30![]() 3 м (18
3 м (18![]() 2 м). Боковые огни системы ОМИ белого цвета устанавливаются по всей длине ВПП в виде двух параллельных рядов на равном расстоянии от осевой линии ВПП и не далее 3,0 м от края ВПП. На последних 600 м ВПП в направлении посадки боковые огни излучают желтый цвет. Огни в рядах размещаются с интервалами не более 60 м (рисунок 13 приложения N 3). Входные огни зеленого цвета устанавливаются на линии, перпендикулярной осевой линии ВПП, не далее 3,0 м с внешней стороны от порога ВПП, двумя группами в количестве не менее пяти в группе (рисунок 13 приложения N 3).
2 м). Боковые огни системы ОМИ белого цвета устанавливаются по всей длине ВПП в виде двух параллельных рядов на равном расстоянии от осевой линии ВПП и не далее 3,0 м от края ВПП. На последних 600 м ВПП в направлении посадки боковые огни излучают желтый цвет. Огни в рядах размещаются с интервалами не более 60 м (рисунок 13 приложения N 3). Входные огни зеленого цвета устанавливаются на линии, перпендикулярной осевой линии ВПП, не далее 3,0 м с внешней стороны от порога ВПП, двумя группами в количестве не менее пяти в группе (рисунок 13 приложения N 3).
6. Схемы расположения систем ССО при смещенном пороге соответствуют рисункам 4, 9 и 14 приложения N 3. Огни приближения системы ОМИ между началом ВПП и смещенным порогом могут не устанавливаться. При смещении порога более чем на 300 м световой горизонт заменяется двумя фланговыми горизонтами, расположенными на расстоянии 300![]() 12 м от смещенного порога ВПП. Боковые (посадочные) огни ВПП между началом ВПП и смещенным порогом излучают красный цвет в направлении захода на посадку, а в случае использования этого участка ВПП для взлета - желтый цвет в обратном направлении.
12 м от смещенного порога ВПП. Боковые (посадочные) огни ВПП между началом ВПП и смещенным порогом излучают красный цвет в направлении захода на посадку, а в случае использования этого участка ВПП для взлета - желтый цвет в обратном направлении.
7. Схема расположения рулежных огней систем ССО соответствует рисунку 10 приложения N 3. Боковые рулежные огни синего цвета располагаются по обеим сторонам рулежной дорожки на расстоянии не более 3,0 м от края РД с интервалом не более 60,0 м, на закругленных участках РД огни устанавливаются с меньшим интервалом, который определяется радиусом кривизны РД.
Приложение N 5
к Методическим рекомендациям
по летным проверкам наземных средств
РТОП, связи и систем ССО
(п.43)
ОПРЕДЕЛЕНИЕ ОШИБКИ
информации об азимуте/пеленге и/или дальности с использованием
полуавтоматической аппаратуры летного контроля
Ошибка информации об азимуте/пеленге и/или дальности (![]() ,
, ![]() Д) с использованием полуавтоматической АЛК со спутниковой навигационной системой ГЛОНАСС/GPS определяется при полетах ВСЛ по орбите и по воздушным трассам.
Д) с использованием полуавтоматической АЛК со спутниковой навигационной системой ГЛОНАСС/GPS определяется при полетах ВСЛ по орбите и по воздушным трассам.
1. Полеты по орбите.
Перед началом измерений в приемник спутниковой навигационной системы ГЛОНАСС/GPS ВСЛ вводятся координаты АФУ проверяемого радиомаяка PMA/VOR в системе координат WGS-84.
Систематическая (![]() i) и случайная (
i) и случайная (![]() ) составляющие ошибки информации об азимуте/пеленге радиомаяков PMA/VOR вычисляются следующим образом:
) составляющие ошибки информации об азимуте/пеленге радиомаяков PMA/VOR вычисляются следующим образом:
АЛК работает в режиме определения ошибки информации об азимуте/пеленге PMA/VOR. В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра (Ai/Пi) на выходе навигационного приемного устройства АЛК, а также текущие значения этих же параметров по спутниковой навигационной системе ГЛОНАСС/GPS (![]() /
/![]() ) через каждые 10° полета. Штурман ВСЛ в момент прохода ВС текущих координат азимута/пеленга (Ai/Пi), кратных углам (
) через каждые 10° полета. Штурман ВСЛ в момент прохода ВС текущих координат азимута/пеленга (Ai/Пi), кратных углам (![]() ), равным 10° (20°, 30°, 40, 50-350°, 360°), подает команду "СЧЕТ" БО АЛК. По этой команде БО АЛК фиксирует показания величины тока (Ii) на микроамперметре прибора БКВТ АЛК и регистрирует их в бортовом журнале. По завершении орбитального полета БО АЛК рассчитывает систематическую составляющую ошибки информации об азимуте/пеленге (
), равным 10° (20°, 30°, 40, 50-350°, 360°), подает команду "СЧЕТ" БО АЛК. По этой команде БО АЛК фиксирует показания величины тока (Ii) на микроамперметре прибора БКВТ АЛК и регистрирует их в бортовом журнале. По завершении орбитального полета БО АЛК рассчитывает систематическую составляющую ошибки информации об азимуте/пеленге (![]() i) по формуле:
i) по формуле:
![]() , где
, где
![]() i - среднее значение ошибки измерения азимута/пеленга, градус;
i - среднее значение ошибки измерения азимута/пеленга, градус;
N - количество измерений.
Случайная составляющая ошибки информации об азимуте/пеленге (![]() ) вычисляется по формуле:
) вычисляется по формуле:
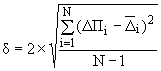 .
.
Величина ошибки информации об азимуте/пеленге (![]() ) составляет не более
) составляет не более ![]() 2,0° и определяется по формуле:
2,0° и определяется по формуле:
 .
.
Пример 1. По результатам летной проверки величина систематической составляющей ошибки информации об азимуте/пеленге (![]() i ) равна - 0,5°, а величина случайной составляющей этой ошибки (
i ) равна - 0,5°, а величина случайной составляющей этой ошибки (![]() ) составляет
) составляет ![]() 1,5°. Величина ошибки информации об азимуте/пеленге для данного примера:
1,5°. Величина ошибки информации об азимуте/пеленге для данного примера: ![]() = -0,5°
= -0,5°![]() 1,5°. Полученный результат показывает, что во всем интервале измерений (0°-360°) ошибка информации об азимуте/пеленге находится в диапазоне от -2,0° до +1,0° и не превышает допустимую
1,5°. Полученный результат показывает, что во всем интервале измерений (0°-360°) ошибка информации об азимуте/пеленге находится в диапазоне от -2,0° до +1,0° и не превышает допустимую ![]() 2,0°, т.е. радиомаяк по этой характеристике соответствует эксплуатационным требованиям.
2,0°, т.е. радиомаяк по этой характеристике соответствует эксплуатационным требованиям.
Пример 2. По результатам летной проверки величина систематической составляющей ошибки информации об азимуте/пеленге (![]() i) равна + 1,5°, а величина случайной составляющей этой ошибки (
i) равна + 1,5°, а величина случайной составляющей этой ошибки (![]() ) составляет
) составляет ![]() 1,5°. Величина ошибки информации об азимуте/пеленге для данного примера:
1,5°. Величина ошибки информации об азимуте/пеленге для данного примера: ![]() = +1,5
= +1,5![]() 1,5'. Полученный результат показывает, что во всем интервале измерений (0° - 360°) ошибка информации об азимуте/пеленге находится в диапазоне от 0° до + 3,0° и превышает допустимую величину, равную
1,5'. Полученный результат показывает, что во всем интервале измерений (0° - 360°) ошибка информации об азимуте/пеленге находится в диапазоне от 0° до + 3,0° и превышает допустимую величину, равную ![]() 2,0°, т.е. радиомаяк по этой характеристике не соответствует эксплуатационным требованиям.
2,0°, т.е. радиомаяк по этой характеристике не соответствует эксплуатационным требованиям.
Пример 3. По результатам летной проверки величина систематической составляющей ошибки информации об азимуте пеленге (![]() i) равна 0°, а величина случайной составляющей этой ошибки (
i) равна 0°, а величина случайной составляющей этой ошибки (![]() ) составляет
) составляет ![]() 3,1°. Величина ошибки информации об азимуте/пеленге для данного примера:
3,1°. Величина ошибки информации об азимуте/пеленге для данного примера: ![]() = 0°
= 0°![]() 3,1'. Полученный результат показывает, что во всем интервале измерений (0° - 360°) ошибка информации об азимуте/пеленге находится в диапазоне от - 3,1° до + 3,1° и превышает допустимую величину, равную
3,1'. Полученный результат показывает, что во всем интервале измерений (0° - 360°) ошибка информации об азимуте/пеленге находится в диапазоне от - 3,1° до + 3,1° и превышает допустимую величину, равную ![]() 2,0°, т.е. радиомаяк по этой характеристике не соответствует эксплуатационным требованиям.
2,0°, т.е. радиомаяк по этой характеристике не соответствует эксплуатационным требованиям.
При вводе радиомаяков PMA/VOR в эксплуатацию с помощью полуавтоматической АЛК по результатам измерений ошибки информации об азимуте/пеленге (![]() ) строится график распределения погрешностей
) строится график распределения погрешностей ![]() в зависимости от угла (
в зависимости от угла (![]() =10°, 20°, 30° - 350°, 360°), который прилагается к акту летной проверки радиомаяка PMA/VOR (
=10°, 20°, 30° - 350°, 360°), который прилагается к акту летной проверки радиомаяка PMA/VOR (![]() =f(
=f(![]() ), при периодических проверках радиомаяков этот график строится при необходимости.
), при периодических проверках радиомаяков этот график строится при необходимости.
Полученные в результате летных измерений систематическая (![]() i) и переменная (
i) и переменная (![]() ) составляющие ошибки информации об азимуте/пеленге (
) составляющие ошибки информации об азимуте/пеленге (![]() ), графики распределения погрешностей (
), графики распределения погрешностей (![]() =f(
=f(![]() ) используются для регулировки радиомаяка с целью исключения систематической ошибки и определения воздушных трасс, на которых ошибка информации об азимуте/пеленге (
) используются для регулировки радиомаяка с целью исключения систематической ошибки и определения воздушных трасс, на которых ошибка информации об азимуте/пеленге (![]() ) является максимальной или превышает допустимую величину.
) является максимальной или превышает допустимую величину.
2. Полеты по воздушным трассам.
Перед началом измерений в приемник спутниковой навигационной системы ГЛОНАСС/GPS ВСЛ вводятся координаты АФУ проверяемого радиомаяка PMA/VOR, РМД/ DME или РСБН в системе координат WGS-84.
Систематическая (![]() i и
i и ![]()
![]() ,) и случайная (
,) и случайная (![]() ) составляющие ошибки информации об азимуте/пеленге и/или дальности радиомаяка PMA/VOR, РМД/DME или РСБН вычисляются следующим образом:
) составляющие ошибки информации об азимуте/пеленге и/или дальности радиомаяка PMA/VOR, РМД/DME или РСБН вычисляются следующим образом:
АЛК работает в режиме определения ошибки информации об азимуте/пеленге и/или дальности PMA/VOR, РМД/DME или РСБН.
В процессе маневрирования ВСЛ измеряются текущие значения информационного параметра (Ai/Пi, Дi) на выходе навигационного приемного устройства АЛК, а также текущие значения этих же параметров по спутниковой навигационной системе ГЛОНАСС/GPS (![]() /
/![]() ,
, ![]() ) через каждые 5 км полета. Штурман ВСЛ в момент прохода ВС текущих координат дальности (Дi), кратных 5 км (10 км, 15 км, ... 75 км, 80 км, ... 225 км, ... 300 км, ...) подает команду "СЧЕТ" БО АЛК. По этой команде БО АЛК фиксирует показания величины тока (Ii) на микроамперметре прибора БКВТ АЛК и регистрирует их в бортовом журнале. По завершении полета по воздушной трассе БО АЛК рассчитывает систематическую составляющую ошибки информации об азимуте/пеленге по формуле:
) через каждые 5 км полета. Штурман ВСЛ в момент прохода ВС текущих координат дальности (Дi), кратных 5 км (10 км, 15 км, ... 75 км, 80 км, ... 225 км, ... 300 км, ...) подает команду "СЧЕТ" БО АЛК. По этой команде БО АЛК фиксирует показания величины тока (Ii) на микроамперметре прибора БКВТ АЛК и регистрирует их в бортовом журнале. По завершении полета по воздушной трассе БО АЛК рассчитывает систематическую составляющую ошибки информации об азимуте/пеленге по формуле:
![]() , где
, где
![]() - среднее значение ошибки измерения азимута/пеленга, градус;
- среднее значение ошибки измерения азимута/пеленга, градус;
N - количество измерений.
Систематическая составляющая ошибки информации о дальности рассчитывается по формуле:
![]() , где
, где
![]() - среднее значение ошибки измерения дальности, км;
- среднее значение ошибки измерения дальности, км;
N - количество измерений.
Случайная составляющая ошибки информации об азимуте/пеленге (![]() ) вычисляется по формуле:
) вычисляется по формуле:
.
Величина ошибки информации об азимуте/пеленге (![]() ) при полете по воздушной трассе составляет не более
) при полете по воздушной трассе составляет не более ![]() 2,0° и определяется по формуле:
2,0° и определяется по формуле:
.
По результатам летных измерений ошибки информации об азимуте/пеленге (![]() ) строится график распределения ошибок
) строится график распределения ошибок ![]() i/
i/![]() i в зависимости от дальности (Д = 5 км, 10 км, 15 км, ... 75 км, ... 225 км, ...), который прилагается к акту летной проверки радиомаяка PMA/VOR (
i в зависимости от дальности (Д = 5 км, 10 км, 15 км, ... 75 км, ... 225 км, ...), который прилагается к акту летной проверки радиомаяка PMA/VOR (![]() i/
i/![]() i = f(Д).
i = f(Д).
Для определения амплитуды отклонений курсовой линии, обусловленных неустойчивостью и колебанием или их комбинацией, на графике ![]() i/
i/![]() i = f(Д) проводятся две линии таким образом, чтобы они были касательными и шли вдоль каждого отрицательного и положительного пика отклонения курсовой линии. Расстояние между этими двумя линиями, измеренное в градусах или микроамперах, будет представлять общую величину отклонений курсовой линии, а половина этой величины соответствует положительному или отрицательному отклонению.
i = f(Д) проводятся две линии таким образом, чтобы они были касательными и шли вдоль каждого отрицательного и положительного пика отклонения курсовой линии. Расстояние между этими двумя линиями, измеренное в градусах или микроамперах, будет представлять общую величину отклонений курсовой линии, а половина этой величины соответствует положительному или отрицательному отклонению.
На равном расстоянии от этих двух линий проводится третья линия, которая будет являться средней курсовой линией (базой), на основании которой измеряется юстировка курсовой линии радиомаяка.
При применении критериев на искривления курсовой линии необходимо учитывать два фактора: точность навигационной системы, которая отчасти основана на максимальном смещении линии курса, равном 3,5° (допуск на искривление), и максимальное расстояние, на которое воздушное судно может отклониться от установленной линии курса. Для выполнения этих требований необходимо, чтобы величина смещения линии курса за счет искривления не превышала ![]() 3,5° относительно скорректированного магнитного азимута или средней линии курса, обеспечиваемой радиомаяком.
3,5° относительно скорректированного магнитного азимута или средней линии курса, обеспечиваемой радиомаяком.
Пример определения амплитуды отклонений курсовой линии радиомаяка PMA/VOR из-за наличия искривления линии курса приведен на рисунке 1 приложения N 4.
В приложение к акту летной проверки радиомаяка PMA/VOR в графы 4, 5, 6, 7 таблицы "Результаты измерений" приложения N 6 заносятся данные, полученные при маневрировании ВСЛ по воздушной трассе.
Для определения ошибки информации по азимуту и/или дальности радиомаяка РСБН используются следующие формулы:
![]()
![]() , где
, где
![]() - среднее значение ошибки измерения азимута радиомаяка РСБН, градус;
- среднее значение ошибки измерения азимута радиомаяка РСБН, градус;
![]() - среднее значение ошибки измерения дальности радиомаяка РСБН, км;
- среднее значение ошибки измерения дальности радиомаяка РСБН, км;
N - количество измерений.
Систематическая и случайная составляющие ошибки определения азимута/пеленга (![]() ) радиомаяка PMA/VOR являются неотъемлемыми частями погрешности радиального сигнала радиомаяка и показывают:
) радиомаяка PMA/VOR являются неотъемлемыми частями погрешности радиального сигнала радиомаяка и показывают:
систематическая (постоянная) составляющая ошибки - постоянное смещение информационного сигнала во всем интервале измерений и в большинстве случаев эта составляющая может быть сведена к "0";
случайная (переменная) составляющая ошибки - диапазон колебаний погрешности радиального сигнала радиомаяка относительно систематической составляющей, и эта переменная составляющая распределяется случайным образом во всем диапазоне от 0° до 360°, поэтому для получения достоверного результата требуется статистический материал во всей зоне действия радиомаяка PMA/VOR, что достигается с помощью полетов ВСЛ по орбите.
Приложение N 6
к Методическим рекомендациям
по летным проверкам наземных
средств РТОП, связи и систем ССО
(пп.17-105)
ФОРМЫ АКТОВ
летных проверок наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем светосигнального оборудования аэродромов
1. Форма акта летной проверки РМС (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки радиомаячной системы инструментального | ||||
|
|
с МКп - |
|
° в аэропорту |
|
|
(тип РМС) |
|
|
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| |||||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, годовая, полугодовая, специальная) | ||||||||||||||||||||||||||||
|
летная проверка РМС |
|
N |
|
. | ||||||||||||||||||||||||||
|
|
(тип РМС) |
|
(зав. номер) |
| ||||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| ||||||||||||||||||||||||||||
|
Командир воздушного судна |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Бортовые инженеры-операторы |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Руководитель объекта |
|
|
| |||||||||||||||||||||||||||
|
(должность лица, ответственного за эксплуатацию РМС |
(наименование объекта) |
|
(фамилия, инициалы) | |||||||||||||||||||||||||||
|
|
|
| ||||||||||||||||||||||||||||
|
Измерения параметров и характеристик РМС |
|
проводились в |
|
|
(тип системы) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений приведены в таблице приложения к акту летной проверки РМС инструментального захода ВС на посадку. | ||
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик РМС |
|
, | |||||||||||
|
|
(тип РМС) |
| |||||||||||
|
N |
|
в 2 (3) экз. на |
|
листах. | |||||||||
|
|
(зав. номер) |
| |||||||||||
|
2. Дешифрированные материалы объективного контроля измерений параметров и | |||||||||||||
|
характеристик РМС |
|
N |
|
в 1 (2) экз. на |
|
листах | |||||||
|
|
(тип системы) |
|
(зав. номер) |
|
|
| |||||||
|
(организации, осуществляющей эксплуатацию РМС, - службе ЭРТОС). | |||||||||||||
|
Акт составлен в двух (трех) экземплярах: | |||||||||||||
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию РМС) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 1.1. Результаты измерений параметров и характеристик РМС |
|
N |
|
|
|
(тип) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Единица измерения |
Норма (РМС-I) |
Результаты измерений | |||||||||
|
|
|
|
|
1 комплект |
2 комплект | ||||||||
|
|
|
|
|
факт. |
восст. |
факт. |
восст. | ||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 | ||||||
|
Курсовой радиомаяк | |||||||||||||
|
1 |
Lo |
м |
|
|
|
|
| ||||||
|
2 |
Sк |
РГМ/м |
0,00145 |
|
|
|
| ||||||
|
3 |
|
% |
|
|
|
|
| ||||||
|
4 |
Lав/п |
м |
+ 10,5 |
|
|
|
| ||||||
|
5 |
Lав/л |
м |
- 10,5 |
|
|
|
| ||||||
|
6 |
|
% |
+ 17,0 |
|
|
|
| ||||||
|
7 |
|
% |
- 17,0 |
|
|
|
| ||||||
|
|
|
|
|
|
|
|
| ||||||
|
|
от Дмакс до т. "А" |
|
0,031 |
|
|
|
| ||||||
|
|
от т. "А" до т. "В" |
РГМ |
линейное |
|
|
|
| ||||||
|
|
от т. "В" до т. "С" |
|
- |
|
|
|
| ||||||
|
|
от т. "Д" до т. "Е" |
|
- |
|
|
|
| ||||||
|
9 |
АХ в секторе от ЛК: |
|
|
|
|
|
| ||||||
|
|
до углов с РГМ |
РГМ |
Монотонное |
|
|
|
| ||||||
|
|
от |
|
0,180 |
|
|
|
| ||||||
|
|
от |
|
0,155 |
|
|
|
| ||||||
|
10 |
Е к, на дальности: |
|
|
|
|
|
| ||||||
|
|
46,3 км (25 м.миль) |
мкВ/м |
40,0 |
|
|
|
| ||||||
|
|
18,5 км (10 м.миль) |
|
90,0 |
|
|
|
| ||||||
|
|
т. "С", т. "Т" |
|
90,0 |
|
|
|
| ||||||
|
11 |
ЗДкг от ЛК |
+ 35° |
км |
31,5 (17 м. миль) |
|
|
|
| |||||
|
|
(дальность |
+ 10° |
км |
46,3 (25 м. миль) |
|
|
|
| |||||
|
|
действия |
0° |
км |
46,3 (25 м. миль) |
|
|
|
| |||||
|
|
радиомаяка) |
- 10° |
км |
46,3 (25 м. миль) |
|
|
|
| |||||
|
|
|
- 35° |
км |
31,5 (17 м. миль) |
|
|
|
| |||||
|
12 |
ЗДкв под углами от линии курса |
|
|
|
|
|
| ||||||
|
|
|
+ 35° |
|
|
|
|
|
| |||||
|
|
|
+ 10° |
|
|
|
|
|
| |||||
|
|
|
0° |
градус |
7,0 |
|
|
|
| |||||
|
|
|
- 10° |
|
|
|
|
|
| |||||
|
|
|
- 35° |
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
| ||||||
|
13 |
Влияние ШК на Lo |
градус |
0,2 |
|
|
|
| ||||||
|
14 |
ВСП (при крене ВСЛ, равном |
% (мкА) |
1,6 (15,0) на линии курса |
|
|
|
| ||||||
|
15 |
Опознавание |
код Морзе |
ясная слышимость |
|
|
|
| ||||||
|
Глиссадный радиомаяк | |||||||||||||
|
16 |
|
градус |
2°- 4° |
|
|
|
| ||||||
|
17 |
|
отн.ед. |
|
|
|
|
| ||||||
|
18 |
|
мин |
(0,07-0,14) |
|
|
|
| ||||||
|
19 |
|
мин |
(0,07-0,14) |
|
|
|
| ||||||
|
20 |
|
% |
|
|
|
|
| ||||||
|
21 |
|
отн.ед. |
+ 0,075 |
|
|
|
| ||||||
|
22 |
|
отн.ед. |
- 0,075 |
|
|
|
| ||||||
|
23 |
|
% |
+ 25,0 |
|
|
|
| ||||||
|
24 |
|
% |
- 25,0 |
|
|
|
| ||||||
|
25 |
Высота опорной точки, "T"/RDH |
м |
15 + 3/- 0 |
|
|
|
| ||||||
|
26 |
|
|
|
|
|
|
| ||||||
|
|
от Дмакс до т. "А" |
|
0,035 |
|
|
|
| ||||||
|
|
от т. "А" до т. "С" |
РГМ |
0,035 |
|
|
|
| ||||||
|
|
от т. "В" до т. "Т" |
|
- |
|
|
|
| ||||||
|
27 |
УХ ГРМ в секторе: |
|
|
|
|
|
| ||||||
|
|
от 0 до углов с РГМ, |
|
Монотонное |
|
|
|
| ||||||
|
|
равным - 0,22 |
|
РГМ |
|
|
|
| ||||||
|
|
от - 0,22 до угла 0,45 |
РГМ |
- 0,22 |
|
|
|
| ||||||
|
|
от 0 до углов с РГМ, |
|
Монотонное |
|
|
|
| ||||||
|
|
равным 0,175 |
|
РГМ |
|
|
|
| ||||||
|
|
от 0,175 до угла 1,75 |
|
0,175 |
|
|
|
| ||||||
|
28 |
Ег на дальности: |
|
|
|
|
|
| ||||||
|
|
18,5 км (10 м.миль) |
мкВ/м |
400 |
|
|
|
| ||||||
|
|
т. "С" |
|
400 |
|
|
|
| ||||||
|
|
т. "Т" |
|
- |
|
|
|
| ||||||
|
29 |
ЗДгг от ЛК (дальность действия): |
|
|
|
|
|
| ||||||
|
|
+ 8° |
|
18,5 (10 м. миль) |
|
|
|
| ||||||
|
|
0° |
км |
18,5 (10 м. миль) |
|
|
|
| ||||||
|
|
- 8° |
|
18,5 (10 м. миль) |
|
|
|
| ||||||
|
30 |
Влияние ШК на |
мин |
12 |
|
|
|
| ||||||
|
Маркерный радиомаяк | |||||||||||||
|
31 |
ЗДмг МРМ: |
|
|
|
|
|
| ||||||
|
|
дальний МРМ |
м |
600 |
|
|
|
| ||||||
|
|
ближний МРМ |
м |
300 |
|
|
|
| ||||||
|
32 |
Ем: |
|
|
|
|
|
| ||||||
|
|
на границе ЗД |
мВ |
1,5 |
|
|
|
| ||||||
|
|
внутри ЗД |
мВ |
3,0 |
|
|
|
| ||||||
|
33 |
Манипуляция: |
|
|
|
|
|
| ||||||
|
|
дальний МРМ |
|
2 тире/сек непр. |
|
|
|
| ||||||
|
|
ближний МРМ |
|
6 точек/сек непр. |
|
|
|
| ||||||
|
Бортовой инженер-оператор |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
|
(дата) |
|
|
| ||
Примечания:
1. При периодических летных проверках заполняются графы таблицы в соответствии с программой проверки PMC/ILS, приведенной в приложении N 2 ФАП "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383).
2. Требования к параметрам и характеристикам PMC/ILS - II и III категорий ИКАО приведены в таблице 1.1 приложения N 4 (РМС/СП - в таблице 1.2) к настоящим Методическим рекомендациям.
3. При вводе РМС инструментального захода ВС на посадку в эксплуатацию в графу "ВОССТ." заносятся значения параметров и характеристик РМС при уменьшенной мощности излучения.
4. Кроме таблицы 1.1, к акту летной проверки РМС инструментального захода ВС на посадку прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик РМС (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических характеристик аппаратуры летного контроля).
2. Форма акта летной проверки РМА (VOR)/РМД (DME) (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки азимутально-дальномерного радиомаяка | |||
|
РМА/РМД |
|
в аэропорту |
|
|
|
(тип РМА (VOR)/РМД (DME) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| |||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, годовая, полугодовая, специальная) | ||||||||||||||||||||||||
|
летная проверка радиомаяка РМА (VOR)/РМД (DME) |
| |||||||||||||||||||||||||
|
|
(тип РМА/VOR, РМД/DME) | |||||||||||||||||||||||||
|
N |
|
, N |
|
. | ||||||||||||||||||||||
|
|
(зав. номер РМА/VOR) |
|
(зав. номер РМД (DME) |
| ||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовые инженеры-операторы |
|
| |
|
|
|
(фамилия, инициалы) | |
|
|
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию РМА/РМД) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик PMA(VOR)/PMD(DME) |
|
|
|
(тип радиомаяка) |
|
проводились в соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик РМА/РМД |
| ||||||
|
|
(тип радио- | ||||||
|
N |
|
N |
|
в 2 (3) экз. на |
|
листах. | |
|
|
(зав. номер РМА/VOR) |
|
(зав. номер РМD/DME) |
| |||
|
2. Дешифрированные материалы объективного контроля измерения параметров и |
|
характеристик РМА/РМД |
|
N |
|
, N |
|
в 1 (2) экз. на |
|
листах | |
|
|
(тип радио- |
|
(зав номер РМА) |
|
(зав номер РМД) |
|
|
| |
|
(организации, осуществляющей эксплуатацию PMA(VOR)/PMД(DME), - службе ЭРТОС). |
|
Акт составлен в двух (трех) экземплярах: |
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию РМА/РМД) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 2.1. Результаты измерений параметров и характеристик РМА/РМД N |
| |
|
|
(зав. |
|
N п/п |
Наименование параметра, характеристики |
Ед. |
Норма |
МК |
Результаты измерений | |||
|
|
|
|
|
|
1 комплект |
2 комплект | ||
|
|
|
|
|
|
факт. |
восст. |
факт. |
восст. |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Азимутальный радиомаяк - PMA/VOR | ||||||||
|
1 |
ЗДаг РМА по трассе при полете на: |
|
|
|
|
|
|
|
|
|
Н = _____ м "НА" |
|
|
|
|
|
|
|
|
|
Н = _____ м "ОТ" |
км |
3,57 |
|
|
|
|
|
|
|
Н = _____ м "НА" |
|
|
|
|
|
|
|
|
|
Н = _____ м "ОТ" |
|
|
|
|
|
|
|
|
2 |
Ерма в ЗД аг |
мкВ/м |
90,0 |
|
|
|
|
|
|
3 |
ЗД ав (Rнз) |
м |
Rнз |
|
|
|
|
|
|
4 |
|
град |
|
|
|
|
|
|
|
5 |
|
град |
|
|
|
|
|
|
|
6 |
|
град |
|
|
|
|
|
|
|
7 |
|
град |
|
|
|
|
|
|
|
8 |
Опорная контр. точка |
град |
|
|
|
|
|
|
|
9 |
ВСП для |
град |
|
|
|
|
|
|
|
10 |
Опознавание |
четкая слышимость |
|
|
|
|
| |
|
11 |
Непрерывность информации о пеленге (азимуте) |
|
не более 5 кратко- |
|
|
|
|
|
|
12 |
Ошибка информации о пеленге при полете по: посадочному радиалу |
град |
|
|
|
|
|
|
|
Дальномерный радиомаяк - РМД/DME | ||||||||
|
13 |
ЗДдг РМД по трассе |
|
|
|
|
|
|
|
|
|
Н = _____ м "НА" |
|
|
|
|
|
|
|
|
|
Н = _____ м "ОТ" |
км |
не менее ЗД РМА |
|
|
|
|
|
|
|
Н = _____ м "НА" |
|
|
|
|
|
|
|
|
|
Н = _____ м "ОТ" |
|
|
|
|
|
|
|
|
14 |
|
км |
0,46+ |
|
|
|
|
|
|
15 |
Непрерывность информации о дальности |
|
не более пяти кратко- |
|
|
|
|
|
|
16 |
ЗДдг (посадочный режим) |
км |
не менее |
|
|
|
|
|
|
17 |
Точность выдачи информации о дальности до порога ВПП (РМД-НП) |
м |
|
|
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
|
(дата) |
| ||||
Примечание. Кроме таблицы 2.1, к акту летной проверки азимутально-дальномерных радиомаяков PMA(VOR)/PMД(DME) прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик радиомаяков (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических возможностей АЛК).
3. Форма акта летной проверки РСБН (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ | |||||
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки азимутально-дальномерной системы | |||
|
РСБН - |
|
в аэропорту |
|
|
|
(тип) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| |||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, периодическая, специальная) | ||||||||||||||||||||||||
|
летная проверка азимутально-дальномерного радиомаяка РСБН |
| |||||||||||||||||||||||||
|
|
(тип) | |||||||||||||||||||||||||
|
N |
|
. | ||||||||||||||||||||||||
|
|
(зав. номер) |
| ||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовые инженеры-операторы |
|
| |
|
|
|
(фамилия, инициалы) | |
|
|
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию РСБН) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик РСБН |
|
проводились в |
|
|
(тип радиомаяка) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений приведены в таблице приложения к акту летной проверки азимутально-дальномерной системы РСБН. | ||
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик РСБН |
|
, | |||||||||||
|
|
(тип) |
| |||||||||||
|
N |
|
в 2 (3) экз. на |
|
листах. | |||||||||
|
|
(зав. номер) |
| |||||||||||
|
2. Дешифрированные материалы объективного контроля измерения параметров и | |||||||||||||
|
характеристик РСБН |
|
, N |
|
в 1 (2) экз. на |
|
листах | |||||||
|
|
(тип радио- |
|
(зав. номер) |
|
|
| |||||||
|
(организации, осуществляющей эксплуатацию РСБН, - службе ЭРТОС). | |||||||||||||
|
Акт составлен в двух (трех) экземплярах: | |||||||||||||
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию РСБН) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 3.1. Результаты измерений параметров и характеристик РСБН |
|
N |
| ||||
|
|
(тип) |
|
(зав. номер) | ||||
|
|
|
|
|
| |||
|
N |
Наименование |
Ед. |
Норма |
МК |
|
Результаты измерений | |||
|
п/п |
параметра, |
изм. |
|
или |
РМ |
1 комплект |
2 комплект | ||
|
|
характеристики |
|
|
КО |
|
факт. |
восст. |
факт. |
восст. |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
1 |
ЗДг РСБН при |
|
|
|
|
|
|
|
|
|
|
полете на: |
|
|
|
|
|
|
|
|
|
|
Нп = _____ м "НА" |
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
Нп = _____ м "ОТ" |
км |
3,57 |
|
А |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
Нп = _____ м "НА" |
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
Нп = _____ м "ОТ" |
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
2 |
Rнз, радиус нерабочей зоны |
км |
Rнз |
|
|
|
|
|
|
|
3 |
Ошибка определе- |
|
|
Ако |
А |
|
|
|
|
|
|
ния азимута и даль- |
|
|
Дко |
Д |
|
|
|
|
|
|
ности на борту ВСЛ: |
|
|
Ако |
А |
|
|
|
|
|
|
по |
град |
0,5 |
Дко |
Д |
|
|
|
|
|
|
по |
км |
0,5 |
Ако |
А |
|
|
|
|
|
|
|
|
|
Дко |
Д |
|
|
|
|
|
|
|
|
|
Ако |
А |
|
|
|
|
|
|
|
|
|
Дко |
Д |
|
|
|
|
|
4 |
Непрерывность ин- |
|
не более пяти кратко- |
|
|
|
|
|
|
|
5 |
Опознавание |
|
правиль- |
|
|
|
|
|
|
|
6 |
Ошибка опреде- |
|
|
Ако |
А |
|
|
|
|
|
|
ления азимута и |
|
|
Дко |
Д |
|
|
|
|
|
|
дальности |
|
|
Ако |
А |
|
|
|
|
|
|
на ИКО (ВИКО): |
|
|
Дко |
Д |
|
|
|
|
|
|
по - |
град |
1,0 |
Ако |
А |
|
|
|
|
|
|
по - |
км |
3% от Д |
Дко |
Д |
|
|
|
|
|
|
|
|
|
Ако |
А |
|
|
|
|
|
|
|
|
|
Дко |
Д |
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
| ||||||
|
|
|
(фамилия, инициалы) |
|
(подпись) | ||||||
|
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
|
|
|
|
|
|
(дата) |
|
|
|
|
Руководитель объекта |
|
|
|
|
| ||||||
|
(должность лица, ответственного за эксплуатацию РСБН) |
(наимено- |
|
(фамилия, инициалы) |
|
(подпись) | ||||||
|
|
|
|
|
|
| ||||||
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
|
|
|
|
|
(дата) |
|
|
| |
Примечание. Кроме таблицы 3.1, к акту летной проверки РСБН прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик азимутально-дальномерной системы РСБН (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических возможностей АЛК).
4. Форма акта летной проверки ОСП (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки системы ОСП с МКп- |
|
° в аэропорту |
|
|
|
|
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, периодическая, специальная) | |||||||||||||||||||||
|
летная проверка ОСП в составе: |
|
| |||||||||||||||||||||
|
|
ДПРМ: |
ПРС |
|
, N |
|
; МРМ |
|
, N |
|
; |
|
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
|
|
|
БПРМ: |
ПРС |
|
, N |
|
; МРМ |
|
, N |
|
. |
|
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
|
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовые инженеры-операторы |
|
| |
|
|
|
(фамилия, инициалы) | |
|
|
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию ОСП) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик ОСП проводились в соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений оборудования системы посадки с МКп - |
|
° |
|
приведены в таблице приложения к акту летной проверки ОСП. | ||
|
ЗАКЛЮЧЕНИЕ |
|
Система ОСП в составе: |
|
|
ДПРМ: ПРС |
|
, N |
|
; МРМ |
|
, N |
|
; | |||||
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
| |||||
|
|
БПРМ: ПРС |
|
, N |
|
; МРМ |
|
, N |
|
| |||||
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
| |||||
|
в аэропорту |
|
с МКп - |
|
° соответствует | ||||||||||
|
|
(наименование аэропорта) |
|
|
| ||||||||||
|
(не соответствует - указать причину) эксплуатационным требованиям и пригодна для обеспечения полетов без ограничений (с ограничениями - указать причину). | ||||||||||||||
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик системы ОСП в составе: | |||||||||||
|
ДПРМ: ПРС |
|
, N |
|
, МРМ |
|
, N |
|
; | |||
|
|
(тип) |
|
(зав. номер) |
|
(тип) |
|
(зав. номер) |
| |||
|
БПРМ: ПРС |
|
, N |
|
, МРМ |
|
, N |
|
в | |||
|
|
(тип) |
|
(зав. номер) |
|
(тип) |
|
(зав. номер) |
| |||
|
2 (3) экз. на |
|
листах. | |||||||||
|
2. Дешифрированные материалы объективного контроля измерения параметров и | ||
|
характеристик ОСП в 1 (2) экз. на |
|
листах (организации, осуществляющей |
|
эксплуатацию ОСП, - службе ЭРТОС). | ||
|
Акт составлен в двух (трех) экземплярах: | ||
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию ОСП) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 4.1. Результаты измерений параметров и характеристик системы ОСП в составе: |
|
ДПРМ: ПРС |
|
, N |
|
, МРМ |
|
, N |
|
; |
|
|
(тип) |
|
(зав. номер) |
|
(тип) |
|
(зав. номер) |
|
|
БПРМ: ПРС |
|
, N |
|
, МРМ |
|
, N |
|
|
|
|
(тип) |
|
(зав. номер) |
|
(тип) |
|
(зав. номер) |
|
|
N |
Наименование |
Еди- |
Норма |
N |
Результаты измерений | |||
|
п/п |
параметра, характеристики |
ница изм. |
|
трассы |
1 комплект |
2 комплект | ||
|
|
|
|
|
|
факт. |
восст. |
факт. |
восст. |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗД дальней ПРС |
км |
150,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
ЗД ближней ПРС |
км |
50,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Опознавание |
|
правиль- |
|
|
|
|
|
|
4 |
ЗД дальнего МРМ |
м |
600 |
|
|
|
|
|
|
5 |
ЗД ближнего МРМ |
м |
300 |
|
|
|
|
|
|
6 |
Ем на границе ЗД |
мВ/м |
1,5 |
|
|
|
|
|
|
7 |
Ем внутри ЗД |
мВ/м |
3,0 |
|
|
|
|
|
|
8 |
Манипуляция |
код Мор- |
кодовые знаки правиль- |
|
|
|
|
|
|
9 |
Возможность использования ОСП для привода ВС на аэродром (полето- |
|
отсут- |
|
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
|
(дата) | |||||
Примечание. Кроме таблицы 4.1, к акту летной проверки ОСП прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик оборудования (ПРС, МРМ), входящего в состав системы посадки (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических возможностей аппаратуры летного контроля ВСЛ).
5. Форма акта летной проверки ОПРС (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
| |||
|
летной проверки ОПРС |
|
в аэропорту |
|
|
|
(тип ПРС) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, периодическая, специальная) | |||||||||||||||||||||
|
летная проверка ОПРС |
|
, N |
|
(МРМ |
|
, N |
|
, |
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
|
|
при наличии). |
|
|
|
|
|
|
|
|
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовые инженеры-операторы |
|
| |
|
|
|
(фамилия, инициалы) | |
|
|
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию ОПРС) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик ОПРС |
|
проводились в |
|
|
(тип ПРС) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений приведены в таблице приложения к акту летной проверки отдельной приводной радиостанции. | ||
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик ОПРС |
|
, | |||||||
|
|
(тип) |
| |||||||
|
N |
|
в 2 (3) экз. на |
|
листах. | |||||
|
|
(зав. номер) |
| |||||||
|
2. Дешифрированные материалы объективного контроля измерения параметров и | |||||||||
|
характеристик ОПРС |
в 1 (2) экз. на |
|
листах (организации, осуществляющей | ||||||
|
эксплуатацию ОПРС, - службе ЭРТОС). | |||||||||
|
Акт составлен в двух (трех) экземплярах: | |||||||||
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию ОПРС) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 5.1. Результаты измерений параметров и характеристик ОПРС |
|
, N |
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Ед. изм. |
Норма |
N трассы |
Результаты измерений | |||
|
|
|
|
|
|
1 комплект |
2 комплект | ||
|
|
|
|
|
|
факт. |
восст. |
факт. |
восст. |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
1 |
ЗД ПРС для обеспечения полетов по воздушным трассам |
км |
150,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
ЗД ПРС для обеспечения полетов в районе аэродрома |
км |
50,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
Опознавание |
|
правиль- |
|
|
|
|
|
|
4 |
Возможность использования ОПРС для обеспечения полетов (полетопригодность приводной радиостанции) |
|
отсутствие колебаний стрелки АРК более 5°; отсутствие увода ВС с МК |
|
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
|
(дата) | |||||
Приложение
к акту летной проверки ОПРС с МРМ
|
Таблица 5.2. Результаты измерений параметров и характеристик ОПРС в составе: |
|
|
ПРС |
|
, N |
|
, МРМ |
|
, N |
|
|
|
|
|
(тип ПРС) |
|
(зав. номер) |
|
(тип МРМ) |
|
(зав. номер) |
|
|
N |
Наименование |
Ед. |
Норма |
N |
Результаты измерений | |||
|
п/п |
параметра, характеристики |
изм. |
|
трассы |
1 комплект |
2 комплект | ||
|
|
|
|
|
|
факт. |
восст. |
факт. |
восст. |
|
1 |
ЗД ОПРС для обес- |
км |
150,0 |
|
|
|
|
|
|
|
печения полетов по |
|
|
|
|
|
|
|
|
|
воздушным трассам |
|
|
|
|
|
|
|
|
2 |
ЗД ОПРС для обес- |
км |
50,0 |
|
|
|
|
|
|
|
печения полетов в |
|
|
|
|
|
|
|
|
|
районе аэродрома |
|
|
|
|
|
|
|
|
3 |
ЗД трассового МРМ |
м |
|
|
|
|
|
|
|
4 |
Ем на границе ЗД |
мВ/м |
1,5 |
|
|
|
|
|
|
5 |
Манипуляция |
|
|
|
|
|
|
|
|
6 |
Опознавание, полетопригодность ПРС с МРМ |
|
правиль- |
|
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
|
(дата) | |||||
Примечание. Кроме таблицы 5.1 (5.2), к акту летной проверки приводной радиостанции прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик ОПРС (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических возможностей АЛК).
6. Форма акта летной проверки АРП (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ | |||||
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки автоматического радиопеленгатора | |||
|
АРП/VDF |
|
в аэропорту |
|
|
|
(тип АРП) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| |||||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, периодическая, специальная) | ||||||||||||||||||||||||||||
|
летная проверка РМС |
|
N |
|
. | ||||||||||||||||||||||||||
|
|
(тип АРП) |
|
(зав. номер) |
| ||||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| ||||||||||||||||||||||||||||
|
Командир воздушного судна |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Бортовые инженеры-операторы |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Руководитель объекта |
|
|
| |||||||||||||||||||||||||||
|
(должность лица, ответственного за эксплуатацию АРП) |
(наименование объекта) |
|
(фамилия, инициалы) | |||||||||||||||||||||||||||
|
Измерения параметров и характеристик АРП |
|
проводились в |
|
|
(тип АРП) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений приведены в таблице приложения к акту летной проверки автоматического радиопеленгатора. | ||
Приложения:
|
1. Таблица - результаты измерений параметров и характеристик АРП |
|
, | |||||||
|
|
(тип) |
| |||||||
|
N |
|
в 2 (3) экз. на |
|
листах. | |||||
|
|
(зав. номер) |
| |||||||
|
2. Дешифрированные материалы объективного контроля измерения параметров и | |||||||||
|
характеристик АРП |
в 1 (2) экз. на |
|
листах (организации, осуществляющей | ||||||
|
|
|
|
| ||||||
|
эксплуатацию АРП, - службе ЭРТОС). | |||||||||
|
Акт составлен в двух (трех) экземплярах: | |||||||||
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовые инженеры-операторы |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию АРП) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 6.1. Результаты измерений параметров и характеристик АРП |
|
, N |
|
|
|
(тип АРП) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Ед. изме- |
Норма |
N |
Пеленг, градус |
Результаты измерений | |
|
|
|
|
|
|
|
факт. |
восст. |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
1 |
ЗДг АРП в горизонтальной плоскости (используемая дальность) на высотах: |
|
|
|
|
|
|
|
|
1000 м |
км |
80,0 |
|
|
|
|
|
|
3000 м |
км |
150,0 |
|
|
|
|
|
2 |
ЗДв АРП в вертикальной плоскости |
градус |
45,0 |
|
|
|
|
|
3 |
Среднеквадратическая ошибка пеленгования, |
градус |
1,5 |
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Руководитель объекта |
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию АРП) |
|
(наименование объекта) |
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
Примечания:
1. Кроме таблицы 6.1, к акту летной проверки АРП прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик радиопеленгатора (материалы объективного контроля: распечатки, графики, таблицы и другие материалы в зависимости от технических возможностей АЛК).
2. Среднеквадратическая ошибка пеленгования (![]() п) радиопеленгатора типа АРП-75 составляет 2,5°.
п) радиопеленгатора типа АРП-75 составляет 2,5°.
7. Форма акта летной проверки ПРЛ (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки посадочного радиолокатора |
|
| |||
|
|
(тип ПРЛ) |
| |||
|
|
в аэропорту |
| |||
|
|
|
(наименование аэропорта) | |||
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| |||||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, специальная) | ||||||||||||||||||||||||||||
|
летная проверка ПРЛ |
|
N |
|
. | ||||||||||||||||||||||||||
|
|
(тип ПРЛ) |
|
(зав. номер) |
| ||||||||||||||||||||||||||
|
|
| |||||||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| ||||||||||||||||||||||||||||
|
Командир воздушного судна |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Бортовой инженер-оператор |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Представитель испытательной бригады от КДП |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Представитель испытательной бригады от УВД |
|
| ||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | ||||||||||||||||||||||||||||
|
Представитель монтажной организации |
|
|
| |||||||||||||||||||||||||||
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) | |||||||||||||||||||||||||||
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию ПРЛ) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик ПРЛ |
|
проводились в | |||
|
|
(тип РЛС) |
| |||
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |||||
|
1. Результаты измерений приведены в таблице приложения к акту летной проверки радиолокатора. | |||||
|
2. Фотоконтроль проводился с |
|
индикаторов ПРЛ. | |||
|
|
(рабочих, выносных, отдельных) |
| |||
|
| |||||
Приложения:
|
1. Протокол наземной проверки ПРЛ |
|
, N |
|
в 1 (2) экз. | ||||||||
|
|
(тип) |
|
(зав.номер) |
| ||||||||
|
на |
|
листах. | ||||||||||
|
|
|
| ||||||||||
|
2. Таблица - результаты измерений параметров и характеристик ПРЛ |
| |||||||||||
|
|
(тип) | |||||||||||
|
N |
|
в 2 (3) экз. на |
|
листах. | ||||||||
|
|
(зав. номер) |
|
|
| ||||||||
|
3. Дешифрированные материалы объективного контроля измерения параметров и |
|
характеристик ПРЛ |
|
, N |
|
в 1 (2) экз. на |
|
листах |
|
|
(тип) |
|
(зав. номер) |
|
|
|
|
(фотографии с экранов индикаторов ПРЛ в основных режимах работы радиолокатора), - организации, осуществляющей эксплуатацию ПРЛ. | ||||||
|
Все приложение в 1 (2) экземпляре - организации, осуществляющей эксплуатацию ПРЛ, - службе ЭРТОС. Пункт 2 приложения - авиационному предприятию - эксплуатанту ВСЛ. |
|
Акт составлен в двух (трех) экземплярах: |
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от КДП |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель монтажной организации |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
(должность, наименование организации) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
(должность лица, ответственного за эксплуатацию ПРЛ) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Таблица 7.1. Результаты измерений параметров и характеристик ПРЛ |
|
, N |
|
|
|
(тип) |
|
(зав. номер) |
|
N |
Наименование |
Ед. |
Норма |
Результаты измерений | |||
|
п/п |
параметра, |
изм. |
по |
1 комплект |
2 комплект | ||
|
|
характеристики |
|
ЭД |
Основная антенна |
Резервная антенна | ||
|
|
|
|
|
МКп-__ |
МКп-__ |
МКп-__ |
МКп-__ |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
1 |
ЗД по курсу в режимах: |
|
|
|
|
|
|
|
|
ПАСС |
км |
|
|
|
|
|
|
|
СДЦ |
км |
|
|
|
|
|
|
2 |
ЗД по глиссаде в режимах: |
|
|
|
|
|
|
|
|
ПАСС |
км |
|
|
|
|
|
|
|
СДЦ |
км |
|
|
|
|
|
|
3 |
Сектор обзора антенны курса в горизонтальной плоскости (по азимуту) |
град |
|
|
|
|
|
|
4 |
Угол обзора ДН антенны курса в вертикальной плоскости (по углу места) |
град |
|
|
|
|
|
|
5 |
Сектор обзора антенны глиссады в вертикальной плоскости (по углу места) |
град |
|
|
|
|
|
|
6 |
Угол обзора ДН антенны глиссады в горизонтальной плоскости (по азимуту) |
град |
|
|
|
|
|
|
7 |
Отметка от ВС по экрану индикатора наблюдается до: |
|
|
|
|
|
|
|
|
Н мин |
м |
|
|
|
|
|
|
|
Д мин |
м |
|
|
|
|
|
|
8 |
Погрешность информации по: |
|
|
|
|
|
|
|
|
курсу |
мин |
|
|
|
|
|
|
|
глиссаде |
мин |
|
|
|
|
|
|
|
дальности |
м |
|
|
|
|
|
|
Бортовой инженер-оператор |
|
|
|
| ||||||
|
|
|
(фамилия, инициалы) |
|
(подпись) | ||||||
|
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
|
|
|
|
|
|
(дата) |
|
|
|
|
Представитель монтажной |
|
|
|
| ||||||||
|
организации |
|
|
|
|
| |||||||
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) |
|
(подпись) | |||||||
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
|
|
|
|
|
(дата) |
|
|
| ||
|
Руководитель объекта |
|
|
|
|
| ||||||
|
(должность лица, ответственного за эксплуатацию ПРЛ) |
(наимено- |
|
(фамилия, инициалы) |
|
(подпись) | ||||||
|
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
|
|
|
|
|
(дата) |
|
|
| |
Примечания:
1. Кроме таблицы 7.1, к акту летной проверки ПРЛ прилагаются дешифрированные материалы результатов летных измерений параметров и характеристик посадочного радиолокатора (материалы объективного контроля: распечатки, графики, таблицы, фото и др. в зависимости от технических возможностей АЛК и требований организации, на эксплуатации которой находится посадочный радиолокатор, - службы ЭРТОС).
2. Графа 4 таблицы 7.1 заполняется в соответствии с данными, приведенными в эксплуатационной документации на конкретный тип ПРЛ.
8. Форма акта летной проверки ОРЛ-А (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки аэродромного радиолокатора |
| |||
|
|
(тип ОРЛ-А) | |||
|
|
в аэропорту |
|
| |
|
|
|
(наименование аэропорта) |
| |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, специальная) | |||||||||||||||||||||||||||||
|
летная проверка ОРЛ-А |
|
N |
|
. | |||||||||||||||||||||||||||
|
|
(тип РЛС) |
|
(зав. номер) |
| |||||||||||||||||||||||||||
|
|
| ||||||||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| |||||||||||||||||||||||||||||
|
Командир воздушного судна |
|
| |||||||||||||||||||||||||||||
|
|
|
(фамилия, инициалы) | |||||||||||||||||||||||||||||
|
Бортовой инженер-оператор |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель испытательной бригады от КДП |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель испытательной бригады от УВД |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель монтажной организации |
|
|
| |
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
| |
|
(должность лица, ответственного за эксплуатацию ОРЛ-А) |
(наимено- |
|
(фамилия, инициалы) | |
|
Измерения параметров и характеристик ОРЛ-А |
|
проводились в | |
|
|
(тип РЛС) |
| |
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |||
|
Результаты измерений параметров и характеристик обзорного радиолокатора приведены в таблице приложения к акту летной проверки ОРЛ-А. | |||
Приложения:
|
1. Протокол наземной проверки ОРЛ-А |
|
, N |
| ||||||
|
|
(тип РЛС) |
|
(зав. номер) | ||||||
|
в 1 (2) экз. на |
|
листах. | |||||||
|
|
|
| |||||||
|
|
|
| |||||||
|
2. Протокол проверки бортового ответчика |
|
, N |
| ||||||
|
|
(тип СО) |
|
(зав. номер) | ||||||
|
в 1 (2) экз. на |
|
листах. | |||||||
|
|
|
| |||||||
|
3. График углов закрытия ОРЛ-А. |
|
6. Таблица - результаты измерений параметров и характеристик ОРЛ-А |
|
, | |||||
|
|
(тип) |
| |||||
|
N |
|
в 2 (3) экз. на |
|
листах. | |||
|
|
(зав. номер) |
|
|
| |||
Все приложение в 1 (2) экземпляре - организации, осуществляющей эксплуатацию радиолокатора ОРЛ-А, - службе ЭРТОС. Пункт 6 приложения - авиационному предприятию, на эксплуатации которого находятся ВСЛ.
Акт составлен в двух (трех) экземплярах:
экз. N 1 - организации, осуществляющей эксплуатацию средств РТОП и связи (при вводе ОРЛ-А в эксплуатацию - 2 экземпляра), - службе ЭРТОС;
экз. N 2 - авиационному предприятию, на эксплуатации которого находятся воздушные суда-лаборатории.
|
Летную проверку проводили: | ||||||||||||||
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | ||||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||||
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | ||||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||||
|
Представитель испытательной |
|
|
|
|
|
|
|
|
|
| ||||
|
бригады от КДП |
|
|
|
" |
|
" |
|
20 |
|
г. | ||||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||||
|
Представитель испытательной |
|
|
|
|
|
|
|
|
|
| ||||
|
бригады от УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | ||||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||||
|
Представитель монтажной |
|
|
|
|
|
|
|
|
|
| ||||
|
организации |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |||
|
|
(должность, наименование организации) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |||
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |||
|
(должность лица, ответственного за эксплуатацию ОРЛ-А) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |||
|
Таблица 8.1. Результаты измерений параметров и характеристик ОРЛ-А |
|
, N |
| ||
|
|
|
|
(тип РЛС) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Ед. измере- |
Норма по |
N трассы |
Результаты измерений | |
|
|
|
|
|
|
1 |
2 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
1 |
Оптимальный угол наклона антенны РЛС |
град |
|
|
|
|
|
2 |
ЗД по Д* |
км |
|
|
|
|
|
3 |
ЗД по Д* |
км |
|
|
|
|
|
4 |
ЗД по Д* |
км |
|
|
|
|
|
5 |
ЗД по Д* |
км |
|
|
|
|
|
6 |
ЗД по Д* |
км |
|
|
|
|
|
7 |
ЗД по Д* |
км |
|
|
|
|
|
8 |
Среднеквадратическая ошибка определения координат ВС*, первичный канал по: |
|
|
|
|
|
|
|
азимуту, А |
град |
|
|
|
|
|
|
дальности, Д |
м |
|
|
|
|
|
9 |
Среднеквадратическая ошибка определения координат ВС*, вторичный канал режим "УВД" по: |
|
|
|
|
|
|
|
азимуту, А |
град |
|
|
|
|
|
|
дальности, Д |
м |
|
|
|
|
|
10 |
Среднеквадратическая ошибка определения координат ВС*, вторичный канал режим "RBS" по: |
|
|
|
|
|
|
|
азимуту, А |
град |
|
|
|
|
|
|
дальности, Д |
м |
|
|
|
|
|
11 |
Вероятность прохождения информации о номере ВС*, режим "УВД" для: |
Р=0,9 |
|
|
|
|
|
12 |
Вероятность прохождения информации о номере ВС*, режим "RBS" для: |
Р=0,9 |
|
|
|
|
|
13 |
Вероятность прохождения информации о Н полета ВС*, режим "УВД" для: |
Р=0,9 |
|
|
|
|
|
14 |
Вероятность прохождения информации о Н полета ВС*, режим "RBS" для: |
Р=0,9 |
|
|
|
|
|
15 |
Точность совмещения координатных отметок первичного и вторичного каналов по: |
|
соответ- |
|
|
|
|
|
азимуту, А |
град |
|
|
|
|
|
|
дальности, Д |
м |
|
|
|
|
|
16 |
Проверка ЗД** двух посадочных курсов: |
|
соответ- |
|
|
|
|
|
первичный канал (Нп =__м) вторичный канал в режимах: "УВД" (Нп = ____м) |
|
отсут- |
|
|
|
|
17 |
Проверка ЗД*** двух зон ожидания: |
|
соответ- |
|
|
|
|
|
первичный канал (Нп1 = __м) |
|
|
|
|
|
|
|
первичный канал (Нп2 = __м) |
|
|
|
|
|
|
|
вторичный канал в режимах: |
|
отсут- |
|
|
|
|
|
"УВД" (Нп1 = __м) |
|
|
|
|
|
|
|
"УВД" (Нп2 = __м) |
|
|
|
|
|
|
|
"RBS" (Нп1 = __м) |
|
|
|
|
|
|
|
"RBS" (Нп2 = __м) |
|
|
|
|
|
|
18 |
Эффективность работы системы ВАРУ РЛС**** |
отсут- |
соответ- |
|
|
|
________________
* Норма максимальной и минимальной дальности действия аэродромного радиолокатора определяется требованиями эксплуатационной документацией на конкретный тип ОРЛ-А.
** В графах 6, 7 таблицы 8.1 при нормальном функционировании ОРЛ-А (пропадания координатных отметок от ВС не наблюдалось, ложной дополнительной информации по вторичному каналу не проходило) отмечается, что при полете ВСЛ в ЗД двух посадочных курсов пропаданий координатных отметок от ВС не наблюдалось; при наличии пропаданий координатных отметок от ВС в ЗД двух посадочных курсов дополнительно выполняются рисунки схем захода на посадку отдельно по первичному и вторичному каналам в режимах "УВД" и "RBS", на которых отмечаются участки исчезновения отметки от ВС с указанием азимута и количеством пропусков цели на этих участках, а в графах 6, 7 указывается причина возникновения пропусков координатной информации.
*** В графах 6, 7 таблицы 8.1 при нормальном функционировании ОРЛ-А (пропадания координатных отметок от ВС не наблюдалось, ложной дополнительной информации по вторичному каналу не проходило) отмечается, что при полете ВСЛ в ЗД двух зон ожидания пропаданий координатных отметок от ВС не наблюдалось; при наличии пропаданий координатных отметок от ВС в ЗД двух зон ожидания на Hп1 =______м и Нп2 =______м дополнительно выполняются рисунки схем зон ожидания на каждой высоте отдельно по первичному и вторичному каналам в режимах "УВД" и "RBS", на которых отмечаются участки исчезновения отметки от ВС с указанием азимута и количеством пропусков цели на этих участках, и в графах 6, 7 указывается причина возникновения пропусков координатной информации, а также прохождение ложной дополнительной информации по вторичному каналу отмечается на этих рисунках.
**** В графах 6, 7 таблицы 8.1 при нормальном функционировании системы ВАРУ и отсутствии на экране индикатора диспетчера УВД ложных отметок от ВС отмечается, что работа системы ВАРУ соответствует требованиям эксплуатационной документации РЛС; при наличии на экране индикатора диспетчера УВД отдельных отметок, вызванных переотражениями от местных предметов, сигналами от боковых лепестков диаграммы направленности антенны, "перескоков" и привязки формуляров к ложным отметкам указываются координаты (А, Д, Нп), на которых наблюдались эти явления и причины, их вызвавшие.
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
|
Представитель монтажной |
|
|
|
| |
|
организации |
|
|
|
|
|
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
|
Руководитель объекта |
|
|
|
|
| |
|
(должность лица, ответственного за эксплуатацию ОРЛ-А) |
(наимено- |
|
(фамилия, инициалы) |
|
(подпись) | |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
9. Форма акта летной проверки ОРЛ-Т (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки трассового радиолокатора |
|
| |||
|
|
(тип ОРЛ-Т) |
| |||
|
|
в аэропорту |
| |||
|
|
|
(наименование аэропорта) | |||
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, специальная) | |||||||||||||||||||||||||
|
летная проверка ОРЛ-Т |
|
N |
|
. | |||||||||||||||||||||||
|
|
(тип РЛС) |
|
(зав. номер) |
| |||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| ||
|
Командир воздушного судна |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Бортовой инженер-оператор |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель испытательной бригады от КДП |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель испытательной бригады от УВД |
|
| ||
|
|
|
(фамилия, инициалы) | ||
|
Представитель монтажной организации |
|
|
| |
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик ОРЛ-Т |
|
проводились в |
|
|
(тип РЛС) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
ЗАКЛЮЧЕНИЕ
|
Трассовый радиолокатор ОРЛ-Т |
|
, N |
|
аэропорту |
|
|
|
(тип РЛС) |
|
(зав. номер) |
|
(наимено- |
|
соответствует (не соответствует - указать причину) эксплуатационным требованиям и пригоден для обеспечения полетов без ограничений (с ограничениями - указать причину). | |||||
Приложения:
|
1. Протокол наземной проверки ОРЛ-Т |
|
, N |
|
в 1 (2) экз. | |||
|
|
(тип РЛС) |
|
(зав. номер) |
| |||
|
на |
|
листах. | |||||
|
2. График углов закрытия ОРЛ-Т _____ . |
|
3. Расчетный график дальности действия ОРЛ-Т_____ в полярных координатах, скорректированный по результатам летной проверки и с нанесенными основными контролируемыми маршрутами (трассами) полетов ВС и границей зоны ответственности УВД. |
|
Все приложение в 1 (2) экземпляре - организации, осуществляющей эксплуатацию радиолокатора ОРЛ-Т, - службе ЭРТОС. Пункт 5 приложения - авиационному предприятию, на эксплуатации которого находятся ВСЛ. |
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от КДП |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель монтажной организации |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
(должность, наименование организации) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Таблица 9.1. Результаты измерений параметров и характеристик ОРЛ-Т |
|
, N |
| |||||||
|
|
(тип РЛС) |
|
(зав. номер) | |||||||
|
| ||||||||||
|
N п/п |
Наименование параметра, характеристики |
Ед. измере- |
Норма |
N трассы |
Результаты измерений | |||||
|
|
|
|
|
|
1 комплект |
2 комплект | ||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | ||||
|
1 |
Оптимальный угол наклона антенн РЛС |
град |
|
|
|
| ||||
|
2 |
ЗД по Д* |
км |
|
|
|
| ||||
|
3 |
ЗД по Д* мин, первичный канал при Р=0,8 для: |
км |
|
|
|
| ||||
|
4 |
Среднеквадратическая ошибка определения координат ВС* по: |
|
|
|
|
| ||||
|
|
азимуту, А |
град |
|
|
|
| ||||
|
|
дальности, Д |
м |
|
|
|
| ||||
|
5 |
Эффективность работы системы ВАРУ РЛС** |
отсут- |
соответ- |
|
|
| ||||
________________
* Норма максимальной и минимальной дальности действия трассового радиолокатора определяется требованиями эксплуатационной документацией на конкретный тип ОРЛ-Т.
** В графах 6, 7 таблицы 9.1 при нормальном функционировании системы ВАРУ и отсутствии на экране индикатора диспетчера УВД ложных отметок от ВС отмечается, что работа системы ВАРУ соответствует требованиям эксплуатационной документации РЛС; при наличии на экране индикатора диспетчера УВД отдельных отметок, вызванных переотражениями от местных предметов, сигналами от боковых лепестков ДН антенны, "перескоков" и привязки формуляров к ложным отметкам указываются координаты (А, Д и Нп), на которых наблюдались эти явления и причины, их вызвавшие.
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
|
Представитель монтажной |
|
|
|
| |
|
организации |
|
|
|
|
|
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
|
Руководитель объекта |
|
|
|
|
| |
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
(наимено- |
|
(фамилия, инициалы) |
|
(подпись) | |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
10. Форма акта летной проверки ОРЛ-Т со встроенным вторичным каналом (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки трассового радиолокатора со встроенным вторичным | ||||
|
каналом |
|
в аэропорту |
| |
|
|
(тип ОРЛ-Т) |
|
(наименование аэропорта) | |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, специальная) | |||||||||||||||||||||||
|
летная проверка |
|
N |
|
. | |||||||||||||||||||||
|
|
(тип ОРЛ-Т) |
|
(зав. номер) |
| |||||||||||||||||||||
|
Летную проверку выполняли: |
|
| |||
|
Командир воздушного судна |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Бортовой инженер-оператор |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель испытательной бригады от КДП |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель испытательной бригады от УВД |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель монтажной организации |
|
|
| ||
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) | ||
|
Руководитель объекта |
|
|
| ||
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
(наименование объекта) |
|
(фамилия, инициалы) | ||
|
Измерения параметров и характеристик ОРЛ-Т |
|
проводились в |
|
|
(тип РЛС) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП.связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений параметров и характеристик трассового радиолокатора со встроенным вторичным каналом приведены в таблице приложения к акту летной проверки ОРЛ-Т. | ||
ЗАКЛЮЧЕНИЕ
|
Трассовый радиолокатор ОРЛ-Т со встроенным вторичным каналом |
|
, |
|
|
(тип РЛС) | |
|
N |
|
в аэропорту |
|
соответствует |
|
|
(зав. номер) |
|
(наименование аэропорта) |
|
|
(не соответствует - указать причину) эксплуатационным требованиям и пригоден для обеспечения полетов без ограничений (с ограничениями - указать причину). | ||||
Приложения:
|
1. Протокол наземной проверки ОРЛ-Т |
|
, N |
|
в 1 (2) экз. | ||||||
|
|
(тип РЛС) |
|
(зав. номер) |
| ||||||
|
на |
|
листах. | ||||||||
|
|
|
| ||||||||
|
2. Протокол проверки бортового ответчика |
|
, N |
|
в 1 (2) экз. | ||||||
|
|
(тип СО) |
|
(зав. номер) |
| ||||||
|
на |
|
листах. | ||||||||
|
|
|
| ||||||||
|
3. График углов закрытия ОРЛ-Т. |
|
4. Расчетный график дальности действия ОРЛ-Т по первичному и вторичному каналам в полярных координатах, скорректированный по результатам летной проверки и с нанесенными основными контролируемыми маршрутами (трассами) полетов ВС и границей зоны ответственности УВД. |
|
Все приложение в 1 (2) экземпляре - организации, осуществляющей эксплуатацию радиолокатора ОРЛ-Т, - службе ЭРТОС. Пункт 6 приложения - авиационному предприятию, на эксплуатации которого находятся ВСЛ. |
Летную проверку проводили:
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
бригады от КДП |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
бригады от УВД |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель монтажной организации |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
(должность, наименование организации) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Таблица 10.1. Результаты измерений параметров и характеристик ОРЛ-Т |
|
, N |
|
|
|
(тип РЛС) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Ед. измере- |
Норма по ЭД |
N трассы |
Результаты измерений | ||
|
|
|
|
|
|
1 комплект |
2 комплект | |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | |
|
1 |
Оптимальный угол наклона антенны РЛС |
град |
|
|
|
| |
|
2 |
ЗД по Д* |
км |
|
|
|
| |
|
3 |
ЗД по Д* |
км |
|
|
|
| |
|
4 |
ЗД по Д* |
км |
|
|
|
| |
|
5 |
ЗД по Д* |
км |
|
|
|
| |
|
6 |
ЗД по Д* |
км |
|
|
|
| |
|
7 |
ЗД по Д* |
км |
|
|
|
| |
|
8 |
Среднеквадратическая ошибка определения координат ВС*, |
|
|
|
|
| |
|
|
азимуту, А |
град |
|
|
|
| |
|
|
дальности, Д |
м |
|
|
|
| |
|
9 |
Среднеквадратическая ошибка определения координат ВС*, вторичный канал режим "УВД" по: |
|
|
|
|
| |
|
|
азимуту, А |
град |
|
|
|
| |
|
|
дальности, Д |
м |
|
|
|
| |
|
10 |
Среднеквадратическая ошибка определения координат ВС*, вторичный канал режим "RBS" по: |
|
|
|
|
- | |
|
|
азимуту, А |
град |
|
|
|
| |
|
|
дальности, Д |
м |
|
|
|
| |
|
11 |
Вероятность прохождения информации о номере ВС*, режим "УВД" для: |
Р=0,9 |
|
|
|
| |
|
12 |
Вероятность прохождения информации о номере ВС*, режим "RBS" для: |
Р=0,9 |
|
|
|
| |
|
13 |
Вероятность прохождения информации о Н полета ВС*, режим "УВД" для: |
Р=0,9 |
|
|
|
| |
|
14 |
Вероятность прохождения информации о Н полета ВС*, режим "RBS" для: |
Р=0,9 |
|
|
|
| |
|
15 |
Точность совмещения координатных отметок первичного и вторичного каналов по: |
|
соответ- |
|
|
| |
|
|
азимуту, А |
град |
|
|
|
| |
|
|
дальности, Д |
км |
|
|
|
| |
|
16 |
Эффективность работы системы ВАРУ РЛС** |
отсут- |
соответ- |
|
|
| |
________________
* Норма максимальной и минимальной дальности действия трассового радиолокатора со встроенным вторичным каналом определяется эксплуатационной документацией на конкретный тип ОРЛ-Т.
** В графах 6, 7 таблицы 10.1 при нормальном функционировании системы ВАРУ и отсутствии на экране индикатора диспетчера УВД ложных отметок от ВС отмечается, что работа системы ВАРУ соответствует требованиям эксплуатационной документации РЛС; при наличии на экране индикатора диспетчера УВД отдельных отметок, вызванных переотражениями от местных предметов, сигналами от боковых лепестков диаграммы направленности антенны РЛС, "перескоков" и привязки формуляров к ложным отметкам указываются координаты (А, Д и Нп), на которых наблюдались эти явления и причины, их вызвавшие.
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Представитель монтажной организации |
|
|
|
|
|
|
|
(должность, наименование организации) |
|
|
(фамилия, инициалы) |
|
(подпись) | |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Руководитель объекта |
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию ОРЛ-Т) |
|
(наименование объекта) |
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
11. Форма акта летной проверки ВРЛ (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств РТОП) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки трассового вторичного радиолокатора | |||
|
|
|
в аэропорту |
|
|
|
(тип РЛС) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК - |
|
N |
| ||||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, специальная) | |||||||||||||||||||||||||
|
летная проверка |
|
N |
|
. | |||||||||||||||||||||||
|
|
(тип ВРЛ) |
|
(зав. номер) |
| |||||||||||||||||||||||
|
|
| ||||
|
Летную проверку выполняли: |
|
| |||
|
Командир воздушного судна |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Бортовой инженер-оператор |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель испытательной бригады от КДП |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель испытательной бригады от УВД |
|
| |||
|
|
|
(фамилия, инициалы) | |||
|
Представитель монтажной организации |
|
|
| ||
|
|
(должность, наименование организации) |
|
(фамилия, инициалы) | ||
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию ВРЛ) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Измерения параметров и характеристик ВРЛ |
|
проводились в |
|
|
(тип РЛС) |
|
|
соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | ||
|
Результаты измерений параметров и характеристик вторичного радиолокатора приведены в таблице приложения к акту летной проверки ВРЛ. | ||
Приложения:
|
1. Протокол наземной проверки ВРЛ |
|
, N |
|
в 1 (2) экз. | |||
|
|
(тип РЛС) |
|
(зав. |
| |||
|
на |
|
листах. | |||||
|
|
|
| |||||
|
2. Протокол проверки бортового ответчика |
|
, N |
|
в 1 (2) экз. | |||||||||
|
|
(тип ) |
|
(зав. |
| |||||||||
|
на |
|
листах. | |||||||||||
|
|
|
| |||||||||||
|
3. График углов закрытия ВРЛ _______. | |||||||||||||
|
6. Таблица - результаты измерений параметров и характеристик ВРЛ |
|
, N |
| ||||||||||
|
|
|
|
| ||||||||||
|
в 2 (3) экз. на |
|
листах. | |||||||||||
|
|
|
| |||||||||||
|
Все приложение в 1 (2) экземпляре - организации, осуществляющей эксплуатацию | |||
|
вторичного радиолокатора |
|
, - службе ЭРТОС. Пункт 6 приложения - | |
|
|
(тип ВРЛ) |
| |
|
авиационному предприятию, на эксплуатации которого находятся ВСЛ. | |||
Акт составлен в двух (трех) экземплярах:
экз. N 1 - организации, осуществляющей эксплуатацию средств РТОП и связи (при вводе радиолокатора ВРЛ в эксплуатацию - 2 экземпляра), - службе ЭРТОС;
экз. N 2 - авиационному предприятию, на эксплуатации которого находятся воздушные суда-лаборатории.
|
Летную проверку проводили: |
|
|
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от КДП |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель испытательной бригады от УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | ||
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| ||
|
Представитель монтажной |
|
|
|
|
|
|
|
|
|
| ||
|
организации |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
(должность, наименование организации) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
(должность лица, ответственного за эксплуатацию ВРЛ) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Таблица 11.1. Результаты измерений параметров и характеристик ВРЛ |
|
, N |
|
|
|
(тип РЛС) |
|
(зав. номер) |
|
N п/п |
Наименование параметра, характеристики |
Ед. измере- |
Норма ЭД |
N трассы |
Результаты измерений | ||||
|
|
|
|
|
|
1 комплект |
2 комплект | |||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 | |||
|
1 |
Оптимальный угол наклона антенны ВРЛ |
град |
|
|
|
| |||
|
2 |
ЗД по Д* |
км |
|
|
|
| |||
|
3 |
ЗД по Д* |
км |
|
|
|
| |||
|
4 |
ЗД по Д* |
км |
|
|
|
| |||
|
5 |
ЗД по Д* |
км |
|
|
|
| |||
|
6 |
Среднеквадратическая ошибка определения координат ВС*, |
|
|
|
|
| |||
|
|
азимуту, А |
град |
|
|
|
| |||
|
|
дальности, Д |
м |
|
|
|
| |||
|
7 |
Среднеквадратическая ошибка определения координат ВС*, |
|
|
|
|
| |||
|
|
азимуту, А |
град |
|
|
|
| |||
|
|
дальности, Д |
м |
|
|
|
| |||
|
8 |
Вероятность прохождения информации о номере ВС*, |
Р=0,9 |
|
|
|
| |||
|
9 |
Вероятность прохождения информации о номере ВС*, |
Р=0,9 |
|
|
|
| |||
|
10 |
Вероятность прохождения информации о Н полета ВС*, |
Р=0,9 |
|
|
|
- | |||
|
11 |
Вероятность прохождения информации о Н полета ВС*, |
Р=0,9 |
|
|
|
| |||
|
12 |
Эффективность работы системы ВАРУ ВРЛ** |
отсут- |
соответ- |
|
|
| |||
________________
* Норма максимальной и минимальной дальности действия трассового вторичного радиолокатора определяется эксплуатационной документацией на конкретный тип ВРЛ.
** В графах 6, 7 таблицы 11.1 при нормальном функционировании системы ВАРУ и отсутствии на экране индикатора диспетчера УВД ложных отметок от ВС отмечается, что работа системы ВАРУ соответствует требованиям эксплуатационной документации ВРЛ; при наличии на экране индикатора диспетчера УВД отдельных отметок, вызванных переотражениями от местных предметов, сигналами от боковых лепестков диаграммы направленности антенны ВРЛ, "перескоков" и привязки формуляров к ложным отметкам указываются координаты (А, Д и Нп), на которых наблюдались эти явления и причины, их вызвавшие.
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Представитель монтажной организации |
|
|
|
|
|
|
|
(должность, наименование организации) |
|
|
(фамилия, инициалы) |
|
(подпись) | |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Руководитель объекта |
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию ВРЛ) |
|
(наименование объекта) |
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
12. Форма акта летной проверки средств АВЭС (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию наземных средств РТОП и связи)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств связи) |
|
(наименование должности руководителя организации | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию наземных средств РТОП и связи) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки АВЭС |
|
в аэропорту |
|
|
|
(тип средства связи) |
|
(наименование аэропорта) |
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
экипажем ВСЛ* |
|
борт. N |
|
, с калиброванной радиостанцией | |||||||||
|
|
(тип ВС) |
|
|
| |||||||||
|
|
, N |
|
|
| |||||||||
|
(тип средства связи) |
|
(зав. номер) |
|
(наименование авиапредприятия - эксплуатанта ВСЛ) | |||||||||
|
проведена |
| ||||||||||||
|
|
(вид летной проверки: ввод, специальная) | ||||||||||||
|
летная проверка АВЭС |
|
N |
|
. | |||||||||
|
|
(тип наземного средства связи) |
|
(зав. номер) |
| |||||||||
________________
* При проверке средств АВЭС экипажем ВСЛ.
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовой инженер-оператор |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Представитель от КДП |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Представитель службы УВД |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Руководитель объекта |
|
|
|
|
(должность лица, ответственного за эксплуатацию АВЭС) |
(наименование объекта) |
|
(фамилия, инициалы) |
|
Проверка и измерения параметров и характеристик АВЭС |
|
|
|
(тип средства связи) |
|
проводились в соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |
|
Результаты проверки и измерений средств АВЭС приведены в таблице приложения к акту летной проверки АВЭС. | |
Приложения:
|
1. Таблица - результаты проверки и измерений параметров и характеристик |
| ||||||||||
|
|
(тип | ||||||||||
|
|
N |
|
в 2 экз. на |
|
листах. | ||||||
|
средства связи) |
|
(зав. номер) |
| ||||||||
|
2. Протокол калибровки бортовой радиостанции* |
|
, N |
| ||||||||
|
|
(тип р/с) |
|
(зав. | ||||||||
|
в 1 экз. на |
|
листах. | |||||||||
________________
* Бортовая радиостанция, по сигналам которой оцениваются ЗД АВЭС и качество радиообмена "воздух-земля", проверяется в соответствии с требованиями эксплуатационной документации на этот тип радиостанции (ЕРТЭ на данный тип ВС).
Акт составлен в двух (трех) экземплярах:
экз. N 1 - организации, осуществляющей эксплуатацию средств связи (при вводе средства связи в эксплуатацию - 2 экземпляра), - службе ЭРТОС;
экз. N 2-авиационному предприятию, на эксплуатации которого находятся воздушные суда-лаборатории**.
________________
** При проверке средств АВЭС экипажем воздушного судна-лаборатории.
|
Летную проверку проводили: | |||||||||||
|
Командир ВС |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Представитель от КДП |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Представитель службы УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию АВЭС) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 12.1. Результаты проверки и измерений параметров и характеристик |
|
N |
|
|
|
(тип р/с) |
|
(зав. номер) |
|
N п/п |
Наименова- |
Рабочая частота, МГц |
Н |
На- |
Уда- |
Разборчивость речи, баллы |
Взаимовлияние | |||
|
|
|
|
|
|
|
оценка | ||||
|
|
|
|
|
|
|
экипаж |
диспет- |
экипаж |
диспет- | |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 | |
|
1 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
2 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
3 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
4 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
5 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
6 |
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
|
|
|
|
ОТ |
|
|
|
|
| |
|
|
|
|
|
НА |
|
|
|
|
| |
|
Бортовой инженер-оператор* |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
________________
* При проверке средств АВЭС экипажем ВСЛ.
|
Представитель службы УВД |
|
|
|
| |
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
|
Руководитель объекта |
|
|
|
|
| |
|
(должность лица, ответственного за эксплуатацию АВЭС) |
(наимено- |
|
(фамилия, инициалы) |
|
(подпись) | |
|
" |
|
" |
|
20 |
|
г. | |
|
|
(дата) |
| |||||
13. Формы актов летных проверок систем ССО аэродромов (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию систем ССО аэродромов)
|
(наименование организации, осуществляющей эксплуатацию систем ССО) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭСТОП |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средств ЭСТОП) |
|
(наименование должности руководителя | |||||
|
(наименование организации |
|
в соответствии с учредительными документами организации, | |||||
|
в соответствии с учредительными документами) |
|
осуществляющей эксплуатацию систем ССО аэродромов) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки системы ССО |
|
с МКп- |
|
° | |||
|
|
(ОМИ, ОВИ-I, II, III, PAPI, APAPI) |
|
|
| |||
|
|
|
в аэропорту |
|
| |||
|
|
|
|
(наименование аэропорта) |
| |||
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК |
|
N |
| |||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | |||||||||||||||||
|
|
, проведена |
| ||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, годовая, специальная) | ||||||||||||||||||||||
|
летная проверка системы ССО |
| |||||||||||||||||||||||
|
|
(ОМИ, ОВИ-I, II, III, PAPI, APAPI и т.д.) | |||||||||||||||||||||||
|
Летную проверку выполняли: |
|
|
|
Командир воздушного судна |
|
|
|
|
|
(фамилия, инициалы) |
|
Бортовой инженер-оператор |
|
|
|
|
|
(фамилия, инициалы) |
|
|
|
|
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
(фамилия, инициалы) |
|
Проверка и измерения параметров и характеристик системы ССО |
|
|
|
(ОМИ, |
|
проводились в соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |
|
Результаты проверки и измерений параметров и характеристик системы ССО приведены в таблице приложения к акту летной проверки системы ССО. | |
Приложения:
|
1. Таблица - результаты проверки и измерений параметров и характеристик системы ССО | |||||||||
|
|
|
|
| ||||||
|
|
в 2 (3) экз. на |
|
листах. | ||||||
|
(тип: ОМИ, ОВИ-I, II, III, PAPI, APAPI и т.д.) |
| ||||||||
|
2. Материалы объективного контроля: фотографии системы ССО |
| ||||||||
|
|
(ОМИ, | ||||||||
|
аэродрома |
|
в одном (двух) экз. форматом 10x15 (13x18) для | |||||||
|
|
(наименование аэропорта) |
| |||||||
|
организации, осуществляющей эксплуатацию системы ССО, - службе ЭСТОП. | |||||||||
|
Акт составлен в двух (трех) экземплярах: | |||||||||
|
Летную проверку проводили: |
|
|
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
|
Таблица 13.1. Результаты проверки и измерений параметров и характеристик ОМИ, СТО |
|
N |
Наименование параметров, |
Единица |
Результаты проверки, |
|
1 |
2 |
3 |
4 |
|
1 |
Номинальный угол глиссады снижения |
град, мин. |
|
|
2 |
Схема расположения и цвет огней |
соответствие |
|
|
3 |
Яркость огней в подсистемах: |
соответствие |
|
|
|
огни приближения и визуальной индикации глиссады |
|
|
|
|
входные огни |
|
|
|
|
посадочные огни и знака приземления |
|
|
|
|
ограничительные огни |
|
|
|
4 |
Работа устройств дистанционного |
соответствие |
|
|
5 |
Правильность набора групп и яркости |
соответствие |
|
|
6 |
Углы настройки ГО |
град, мин. |
|
|
|
N 1 ( |
|
|
|
|
N 2 ( |
|
|
|
7 |
Соответствие траекторий полета ВС |
соответствие |
|
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Таблица 13.2. Результаты проверки и измерений характеристик ОВИ-I без осевых огней |
|
N п/п |
Наименование параметров, характеристик |
Единица измерения |
Результаты проверки, измерений |
|
1 |
2 |
3 |
4 |
|
1 |
Номинальный угол глиссады снижения с МКп - ____° |
град, мин |
|
|
2 |
Схема расположения и цвет огней |
соответствие |
|
|
3 |
Объем негорящих огней в подсистемах: |
% |
|
|
4 |
Яркость огней в подсистемах: |
соответствие |
|
|
5 |
Работа устройств дистанционного управления |
соответствие |
|
|
6 |
Правильность набора групп и яркости огней с ПОУ диспетчера |
соответствие |
|
|
7 |
Углы настройки ГО |
град, мин |
|
|
8 |
Соответствие траекторий полета ВС при заходе на посадку с использованием системы визуальной индикации глиссады и глиссады РМС |
соответствие |
|
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Таблица 13.3. Результаты проверки и измерений характеристик ОВИ-I с осевыми огнями |
|
N п/п |
Наименование параметров, характеристик |
Единица измерения |
Результаты проверки, измерений |
|
1 |
2 |
3 |
4 |
|
1 |
Номинальный угол глиссады снижения с МКп - ____° |
град, мин |
|
|
2 |
Схема расположения и цвет огней |
соответствие |
|
|
3 |
Объем негорящих огней в подсистемах: |
% |
|
|
4 |
Яркость огней в подсистемах: |
соответствие |
|
|
5 |
Световая маркировка осевых огней ВПП на участках: |
соответствие |
|
|
6 |
Работа устройств дистанционного управления |
соответствие |
|
|
7 |
Правильность набора групп и яркости огней с ПОУ диспетчера |
соответствие |
|
|
8 |
Углы настройки ГО |
град, мин |
|
|
9 |
Соответствие траекторий полета ВС при заходе на посадку с использованием системы визуальной индикации глиссады и глиссады РМС |
соответствие |
|
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
Таблица 13.4. Результаты проверки и измерений характеристик ОВИ-II и ОВИ-III |
|
N |
Наименование параметров, |
Единица |
Результаты проверки, |
|
1 |
2 |
3 |
4 |
|
1 |
Номинальный угол глиссады снижения с МКп - ____° |
град, мин |
|
|
2 |
Схема расположения и цвет огней |
соответствие |
|
|
3 |
Объем негорящих огней в подсистемах: |
% |
|
|
|
огни приближения и визуальной индикации глиссады |
|
|
|
|
входные огни |
|
|
|
|
посадочные огни и знака приземления |
|
|
|
|
|
|
|
|
|
осевые огни ВПП |
|
|
|
4 |
Яркость огней в подсистемах: |
соответствие |
|
|
|
огни приближения и визуальной индикации глиссады |
|
|
|
|
входные огни |
|
|
|
|
посадочные огни и знака приземления |
|
|
|
|
ограничительные огни |
|
|
|
|
рулежные огни и указатели |
|
|
|
|
осевые огни ВПП |
|
|
|
5 |
Световая маркировка осевых огней ВПП на участках: |
соответствие |
|
|
|
300 м от конца ВПП |
|
|
|
|
300-900 м от конца ВПП |
|
|
|
|
остальная часть ВПП |
|
|
|
6 |
Работа устройств дистанционного управления |
соответствие |
|
|
7 |
Правильность набора групп и яркости огней с ПОУ диспетчера |
соответствие |
|
|
8 |
Углы настройки ГО |
град, мин |
|
|
|
N 1 ( |
|
|
|
|
N 2 ( |
|
|
|
|
N 3 ( |
|
|
|
|
N 4 ( |
|
|
|
9 |
Соответствие траекторий полета ВС |
соответствие |
|
|
Бортовой инженер-оператор |
|
|
|
|
|
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
|
|
|
|
|
|
|
|
(должность лица, ответственного за эксплуатацию системы ССО) |
|
|
(фамилия, инициалы) |
|
(подпись) |
|
" |
|
" |
|
20 |
|
г. |
|
(дата) | ||||||
14. Форма акта летной проверки схем полетов по приборам ППП/IАР (реквизит "наименование организации" пишется в соответствии с наименованием, указанным в учредительных документах организации, осуществляющей эксплуатацию схем полетов по приборам)
|
(наименование организации, осуществляющей эксплуатацию наземных средств РТОП и связи организации, |
|
использующей сигналы средств РТОП и связи для управления воздушным движением) |
|
ПРЕДСТАВЛЯЮ НА УТВЕРЖДЕНИЕ |
|
УТВЕРЖДАЮ |
|
Руководитель службы ЭРТОС |
|
|
| ||||
|
(лицо, ответственное за эксплуатацию средства РТОП, |
|
(наименование должности руководителя в соответствии | |||||
|
используемого для схемы полетов по приборам ППП/IАР) |
|
с учредительными документами организации, | |||||
|
(наименование организации |
|
осуществляющей эксплуатацию схем | |||||
|
в соответствии с учредительными документами) |
|
полетов по приборам ППП/IАР) | |||||
|
|
|
|
|
|
|
| |
|
(подпись) |
|
(инициалы, фамилия) |
|
(подпись) |
|
(инициалы, фамилия) | |
|
|
|
|
|
М.П. |
|
| |
|
" |
|
" |
|
20 |
|
г. |
|
|
" |
|
" |
|
20 |
|
г. |
АКТ
|
летной проверки схемы полетов по приборам | |||
|
| |||
|
(тип схемы ППП/IAP: воздушная трасса, внетрассовый маршрут, схема захода на посадку, схема маршрутов прибытия и вылета и т.д.) | |||
|
аэропорта (аэроузла) |
| ||
|
|
(наименование аэропорта/аэроузла) | ||
|
В период с |
" |
|
" |
|
20 |
|
г. |
по |
" |
|
" |
|
20 |
|
г. | ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||
|
экипажем ВСЛ |
|
борт. N |
|
, оборудованным АЛК |
|
N |
| ||||||||||||||||||
|
|
(тип ВС) |
|
|
|
(тип АЛК) |
|
(зав. номер) | ||||||||||||||||||
|
|
, проведена |
| |||||||||||||||||||||||
|
(наименование авиапредприятия - эксплуатанта ВСЛ) |
|
(вид летной проверки: ввод, годовая, специальная) | |||||||||||||||||||||||
|
летная проверка схемы полетов по приборам ППП/IАР |
| ||||||||||||||||||||||||
|
|
(тип схемы ППП/IАР: воздушная трасса N…, | ||||||||||||||||||||||||
|
|
. | ||||||||||||||||||||||||
|
схема захода на посадку с МКп - ___°, схема маршрутов прибытия и вылета, схема FSM и т.д.) |
| ||||||||||||||||||||||||
|
Летную проверку выполняли: |
|
| |
|
Командир воздушного судна |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Бортовой инженер-оператор |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Специалист по схемам ППП/IАР |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Представитель службы УВД |
|
| |
|
|
|
(фамилия, инициалы) | |
|
Руководитель средства РТОП |
|
|
|
|
(лицо, ответственного за эксплуатацию средства для схемы ППП/IАР) |
|
|
(фамилия, инициалы) |
|
Летная проверка схемы ППП/IАР |
| ||||
|
|
(тип схемы ППП/IАР: воздушная трасса N ..., схема захода на посадку с МКп -, и т.д.) | ||||
|
и измерения параметров |
|
N |
|
проводились | |
|
|
(тип средства РТОП для обеспечения полетов по схеме ППП/IAP) |
|
(зав. номер) |
| |
|
в соответствии с требованиями Федеральных авиационных правил "Летные проверки наземных средств РТОП, связи и систем ССО аэродромов ГА", утвержденных приказом Минтранса России от 18 января 2005 года N 1 (зарегистрирован Минюстом России 10 марта 2005 года, регистрационный N 6383). | |||||
|
Результаты проверки и измерений приведены в таблице приложения к акту летной проверки. | |||||
|
Приложение. Таблица - результаты проверки и измерений параметров и | |||||
|
характеристик наземного средства РТОП |
| ||||
|
|
(тип средства РТОП для обеспечения полетов по схеме ППП/IAP) | ||||
|
N |
|
в 2 экз. на |
|
листах. | |
|
|
(зав. номер) |
| |||
|
Акт составлен в 3 (4) экземплярах: | |||||
|
Летную проверку проводили: | |||||||||||
|
Командир ВСЛ |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Бортовой инженер-оператор |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Специалист по схемам ППП/IАР |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Представитель службы УВД |
|
|
|
" |
|
" |
|
20 |
|
г. | |
|
|
|
(подпись) |
|
|
|
|
(дата) |
|
|
| |
|
Руководитель объекта |
|
|
|
|
" |
|
" |
|
20 |
|
г. |
|
(лицо, ответственное за эксплуатацию средства для схемы ППП/IАР) |
(наимено- |
|
(подпись) |
|
|
|
|
(дата) |
|
|
|
Текст документа сверен по:
рассылка
Личный кабинет:
доступно после авторизации Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...
Танцы кубанского блогера Каграманова в шоу “Звездные танцы” не понравятся...  Создайте свой интернет-магазин на новой платформе ReadyScript
Создайте свой интернет-магазин на новой платформе ReadyScript  Хостинг, домены, VPS/VDS, размещение серверов
Хостинг, домены, VPS/VDS, размещение серверов
© 2007-2024 ООО «РуФокс»
о проекте
вакансии
хостинг
создание сайтов
реклама на сайте
наши партнеры
сообщить об ошибке